参照論文の調査
PMHF式に誤りのある「平成26年度 電子部品信頼性調査研究委員会 研究成果報告書」は2015年3月発行です。著者に連絡を取ったところ、論文$\dagger$からの引用だとのことでした。これは2014年発行なので、この論文$\dagger$が元凶であり、ブログで取り上げた日本人の資料である、この資料とこの資料に影響を与えたようです。IEEE発行の査読付き論文なのでそれなりに信用性があり、誤りが広まってしまうのかもしれませんが、非常に遺憾なことです。
もっとも、査読済み論文だからと言って、検証もしないで盲目的に引用する態度にも同様に問題があると考えます。
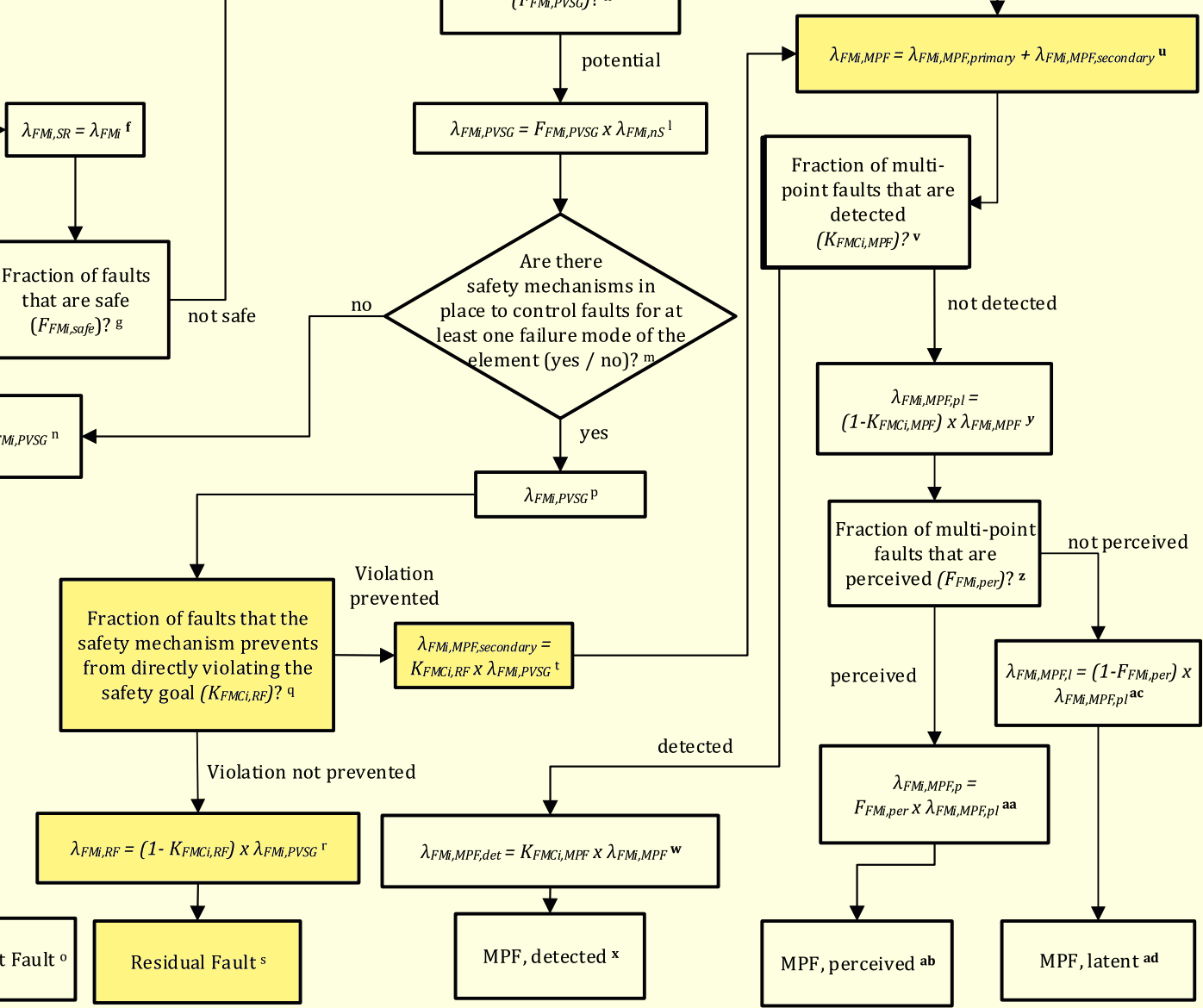
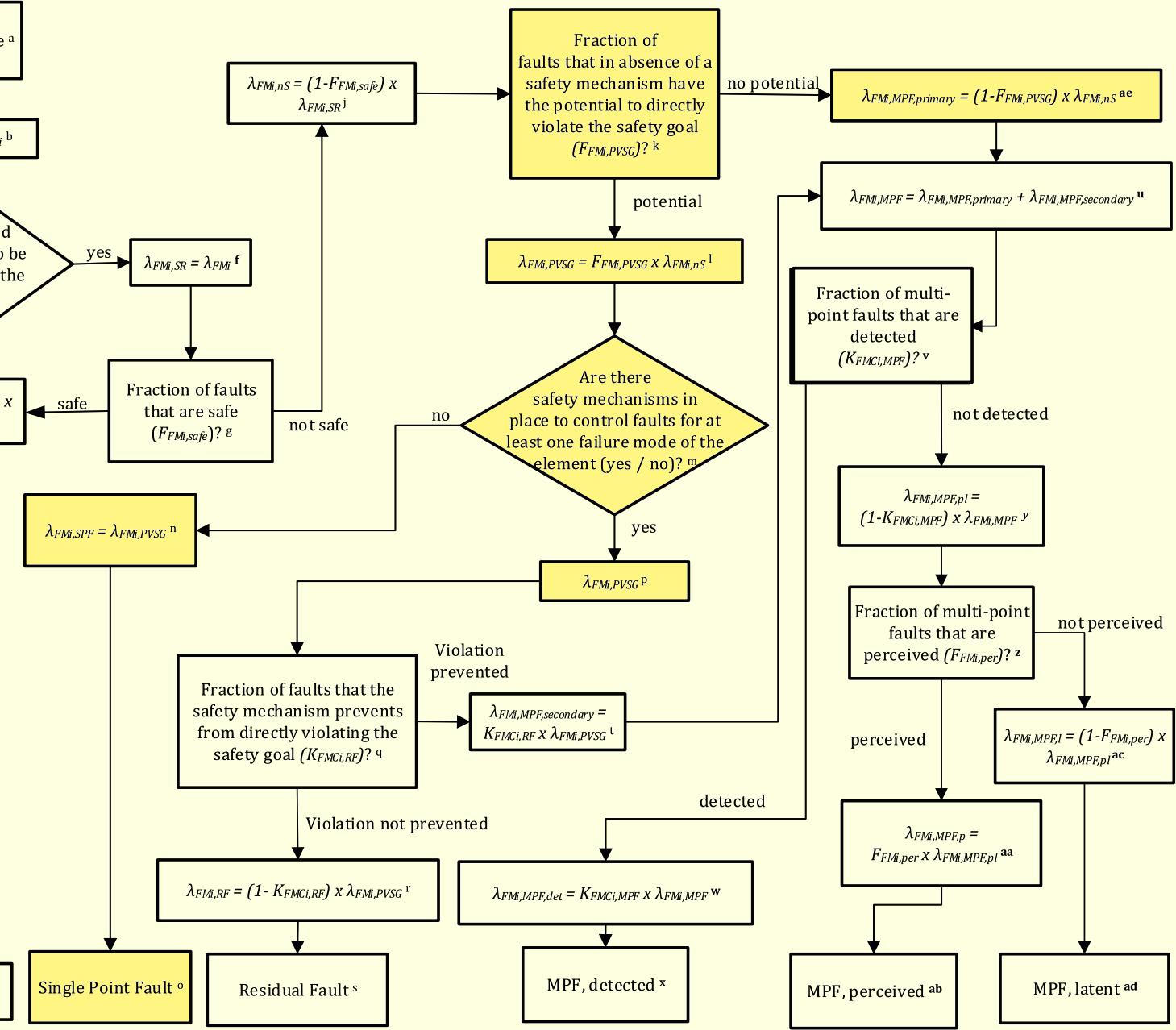
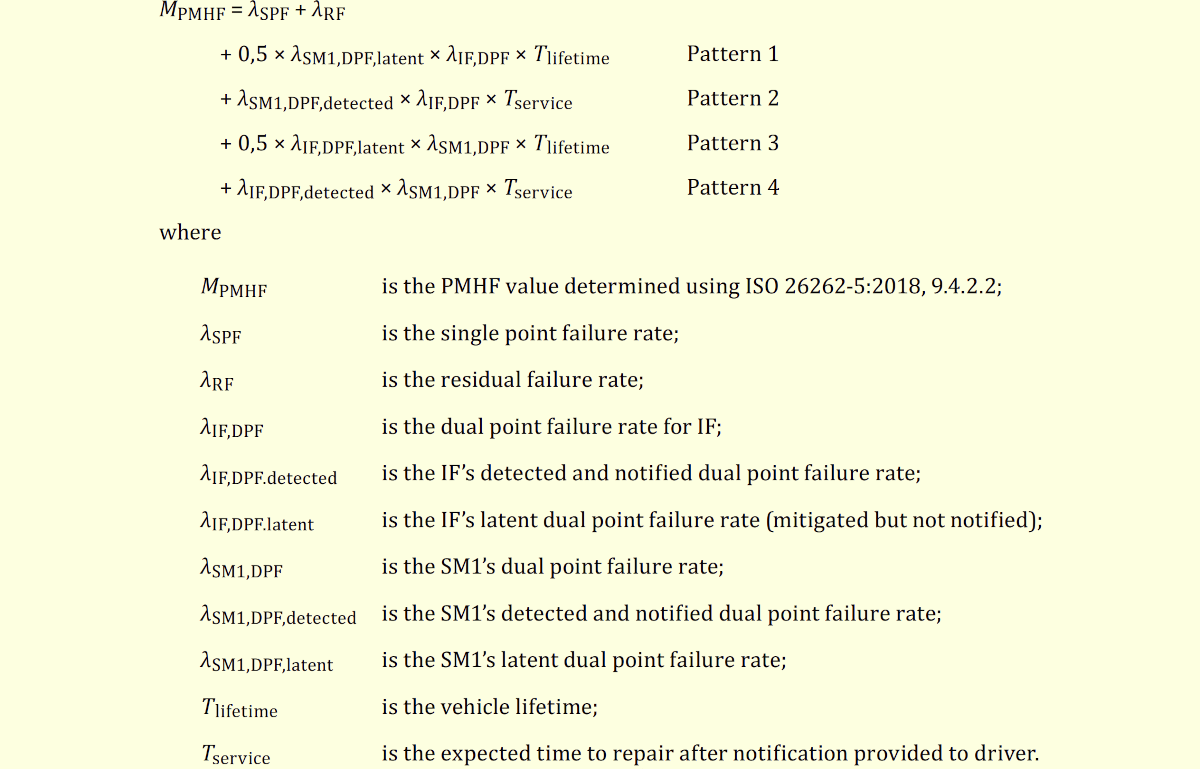
図326.1に当該部分を引用します。良くみると、上記報告書が引用したといいながら、DPF部分はlatentのみとなっています。従って、上記報告書と論文$\dagger$では少々異なります。
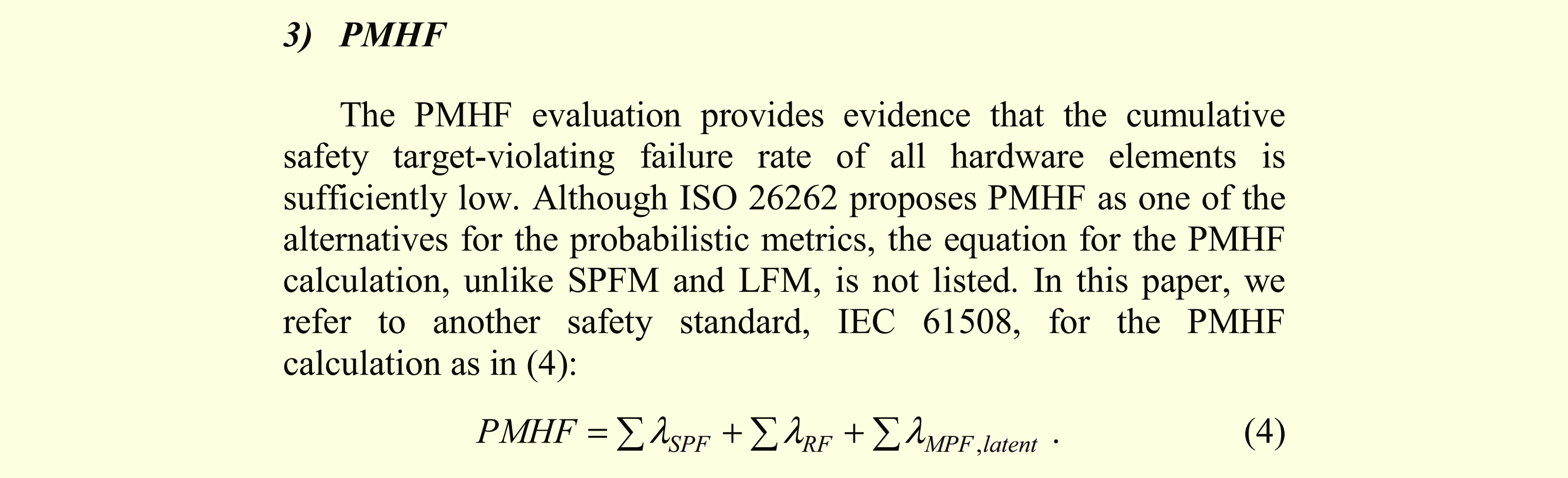 図326.1 ある論文中のPMHF式
図326.1 ある論文中のPMHF式
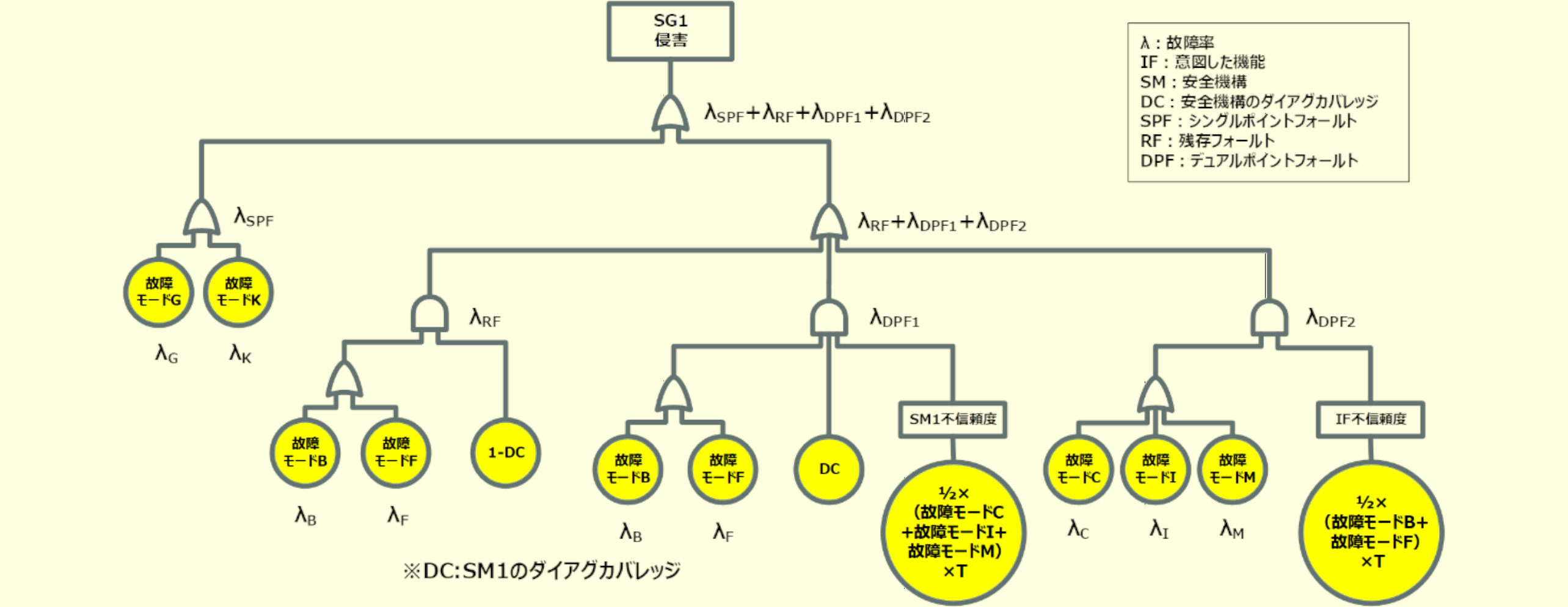
この資料と、参考にした元論文の例では1st SMは存在しても2nd SMの概念が全く書かれていないので$\lambda_\text{MPF}$と$\lambda_\text{MPF,lat}$は一致するのでしょう。
IEC 61508との比較
また、図326.1の説明には、
ISO 26262にはSPFMやLFMと異なりPMHF式が出ていないためIEC 61508を参照する
と書かれていますが、実際はPart 10に式が記載されています。さらにIEC 61508にはPMHFはありません。近い概念としてはPFH(Probability of Failure per Hour)があります。Exidaの資料によればPFHは(326.1)式で表されます。
$$
PFH=\lambda_\text{DU}\tag{326.1}
$$
ただし、これは1oo1の式だと思われます。少なくともDPFは、主機能と安全機構の双方がフォールトしたときの故障であるため、1oo2の式のほうがベターです。
しかしながら、ISO 26262はIEC 61508に基づいているといいながら、PMHF結果式はISO 26262独特のものであるため、1oo2としても式は一致しません。具体的には、ISO 26262はIEC 61508と異なり定期検査及び修理が前提となっています。
IEC 61508で学んだ多くの研究者が同じ誤りを起こしています。論文を見るとすぐ分かります。それは、ISO 26262にはDD, DUという用語は無いにもかかわらず、そのような用語を使用しているからです。そのような概念を表すものはKパラメータと呼ばれる診断率DCであり、
$$
\lambda_{DD}=K_\text{RF}\lambda_\text{IF}, \lambda_{DU}
=(1-K_\text{RF})\lambda_\text{IF}
$$
と表現しなければいけません。IEC 61508を過度に適用することは、上記の誤りにつながります。正しくはあくまでISO 26262の上で考えなくてはなりません。特にIEC 61508にはDPFの概念が無いため注意が必要です。
$\dagger$Y. Chang, L. Huang, H. Liu, C. Yang and C. Chiu, "Assessing automotive functional safety microprocessor with ISO 26262 hardware requirements," Technical Papers of 2014 International Symposium on VLSI Design, Automation and Test, Hsinchu, 2014, pp. 1-4, doi: 10.1109/VLSI-DAT.2014.6834876.
 前のブログ
次のブログ
前のブログ
次のブログ