|
30 |
FS Micro CEO Atsushi Sakurai’s Paper Accepted at RAMS 2026 for the Seventh Consecutive Year |

On October 30, 2025, FS Micro Corporation※1, a provider of ISO 26262※2 consulting, announced that a paper authored by its President and CEO, Atsushi Sakurai, was accepted to RAMS 2026※3, a global conference organized by the IEEE※4 Reliability Society.
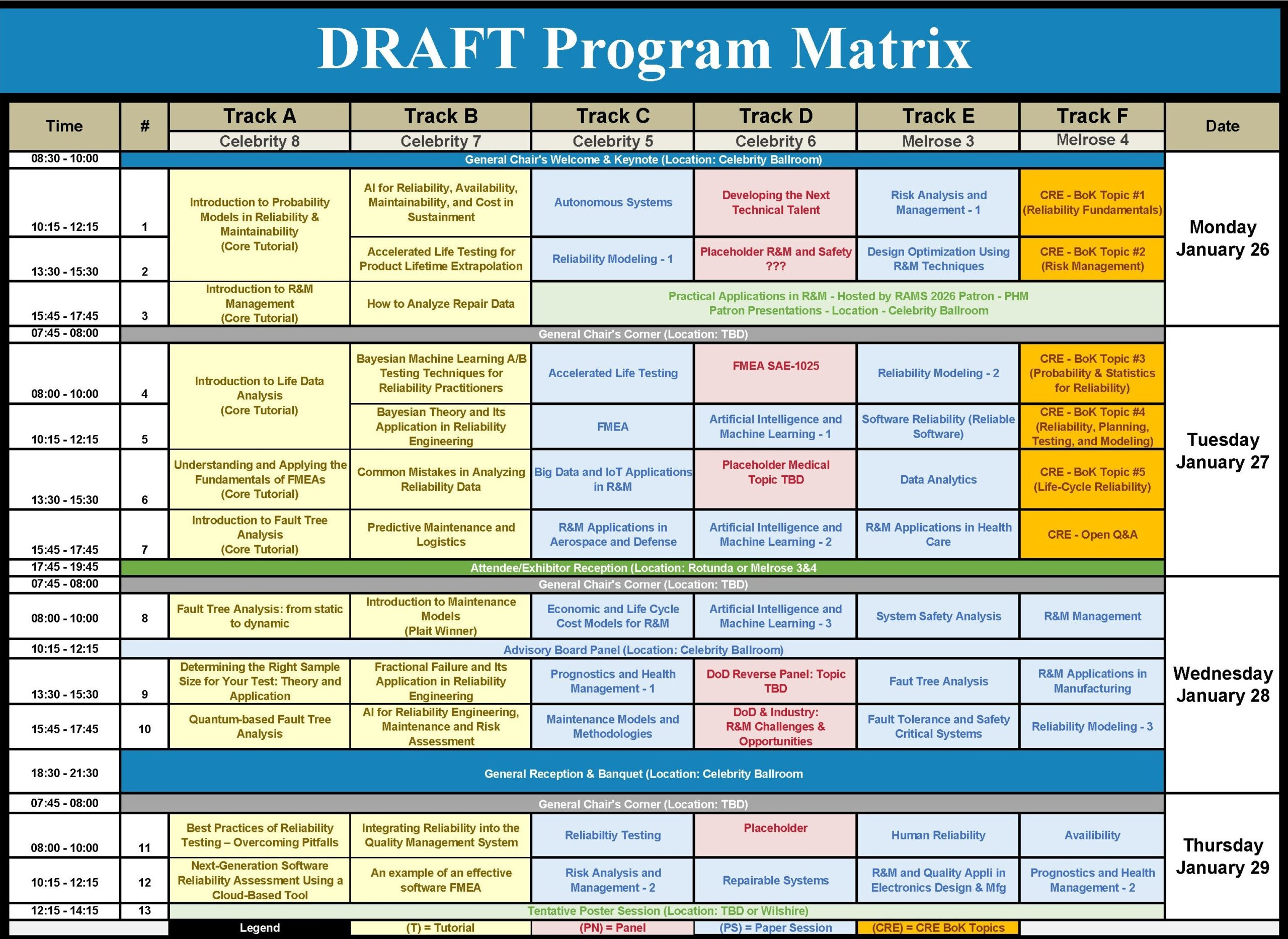
This marks Sakurai’s seventh consecutive acceptance at RAMS since 2020. The paper is scheduled to be presented at RAMS 2026 in Florida, USA, in January 2026, and has also been named a finalist for the Best Paper Award.

Beginning with an acceptance at an IEEE conference in 2017, Sakurai proposed a higher-accuracy PMHF※5 formulation at RAMS 2020 and has since continued contributions, including proposals to correct issues in the published formulae.
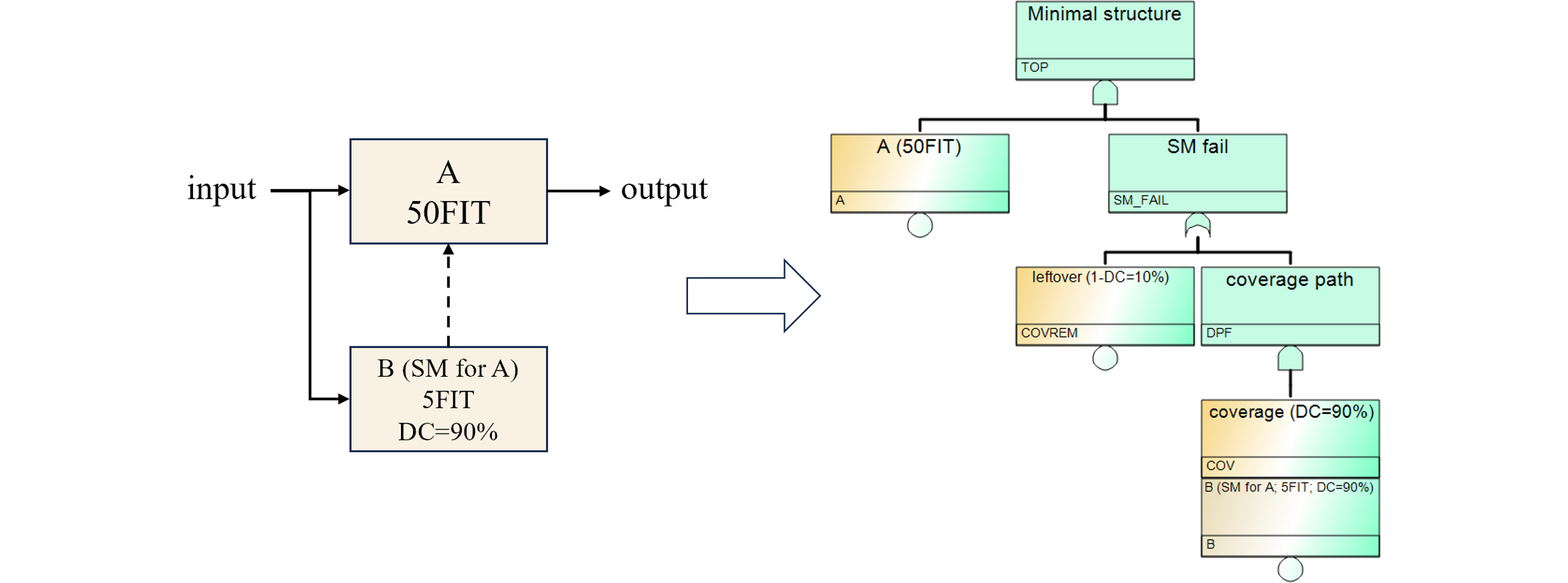
In the RAMS 2026 paper, an LLM※6 is used to automatically generate a fault tree※7 from a system block diagram. The method then analyzes, with an LLM, each component’s contribution to PMHF computed via FTA※8, thereby identifying and improving architectural weaknesses.
The proposed approach not only reduces engineering effort through automation but also contributes to improved system-level reliability in automotive electronics. Based on this research, ADAS※9 and autonomous-driving applications can achieve higher analysis efficiency and more optimized system design.
Notes
※1 FS Micro Corporation. Head Office: Nagoya. President and CEO: Atsushi Sakurai. Consulting for functional safety of automotive electronic systems. https://fs-micro.com/
※2 ISO 26262. International standard for functional safety of road-vehicle electric and electronic systems. Its goal is to reduce the risk of hazardous events during vehicle operation to an acceptable level.
※3 RAMS, Reliability and Maintainability Symposium. International conference on reliability engineering organized by the IEEE Reliability Society and partners. The 72nd symposium will be held in Florida, USA, in 2026. https://rams.org/
※4 IEEE, Institute of Electrical and Electronics Engineers. One of the world’s largest professional organizations advancing technology. https://ieee.org/
※5 PMHF, Probabilistic Metric for Random Hardware Failures. Time-average probability of dangerous failures from random hardware faults, used as a hardware design target in ISO 26262.
※6 LLM, Large Language Model. AI models trained on large text corpora for natural-language understanding and generation.
※7 Fault Tree. Logical tree representing causal pathways of system failures, useful for revealing structural vulnerabilities.
※8 FTA, Fault Tree Analysis. Systematic reliability analysis based on a fault tree, used to derive minimal cut sets and contribution measures for design improvement.
※9 ADAS, Advanced Driver Assistance Systems. Driver-assistance functions such as ACC adaptive cruise control, AEB automatic emergency braking, LKA lane keeping assist, a domain with stringent safety requirements.
Contact
Company: FS Micro Corporation
Representative: Atsushi Sakurai
Established: August 21, 2013
Capital: JPY 32,000,000 (including capital reserve)
Business: Consulting and seminars on functional safety for ISO 26262 automotive electronic systems
Email: info@fs-micro.com
URL: https://fs-micro.com/