論理式だけによるIFUのPMHF式導出 その2
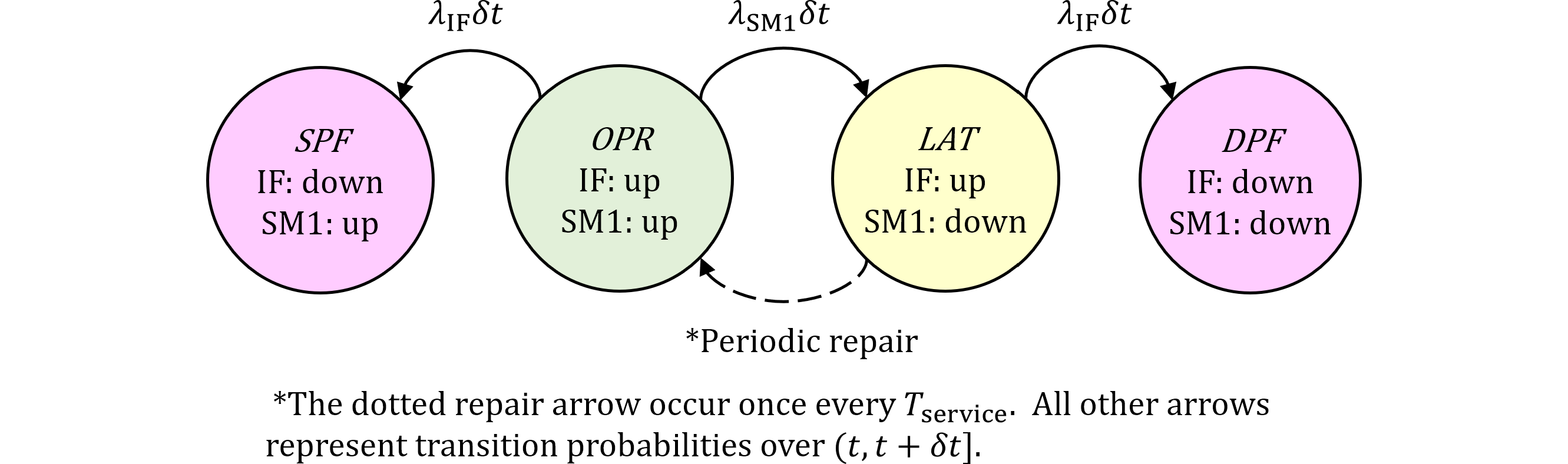
前回は、IF故障が発生した瞬間のVSG判定式から、VSG事象をSPF/RF枝とDPF枝に分解しました。
$$
\{VSG\}=\{VSG_\text{SPF/RF}\}\sqcup\{VSG_\text{DPF}\}
\tag{1081.1}
$$
ここで、$\sqcup$は排反和を表します。すなわち、2つの枝は重複せず、その和としてVSG事象を構成します。
前回得られた2つの枝は、次のように表されます。
$$
\begin{eqnarray}
\left\{
\begin{array}{l}
\{VSG_\text{SPF/RF}\}\equiv\{\overline{IF}\cap\overline{DC_1}\}\\
\{VSG_\text{DPF}\}\equiv\{\overline{IF}\cap DC_1\cap\overline{SM}_{\sigma_\text{IF}}\}
\end{array}
\right.
\end{eqnarray}
\tag{1081.2}
$$
第1式は、IF故障がSM1のカバレッジ外にある枝です。第2式は、IF故障がSM1のカバレッジ内にあり、かつIF故障時点でSM1が故障している枝です。
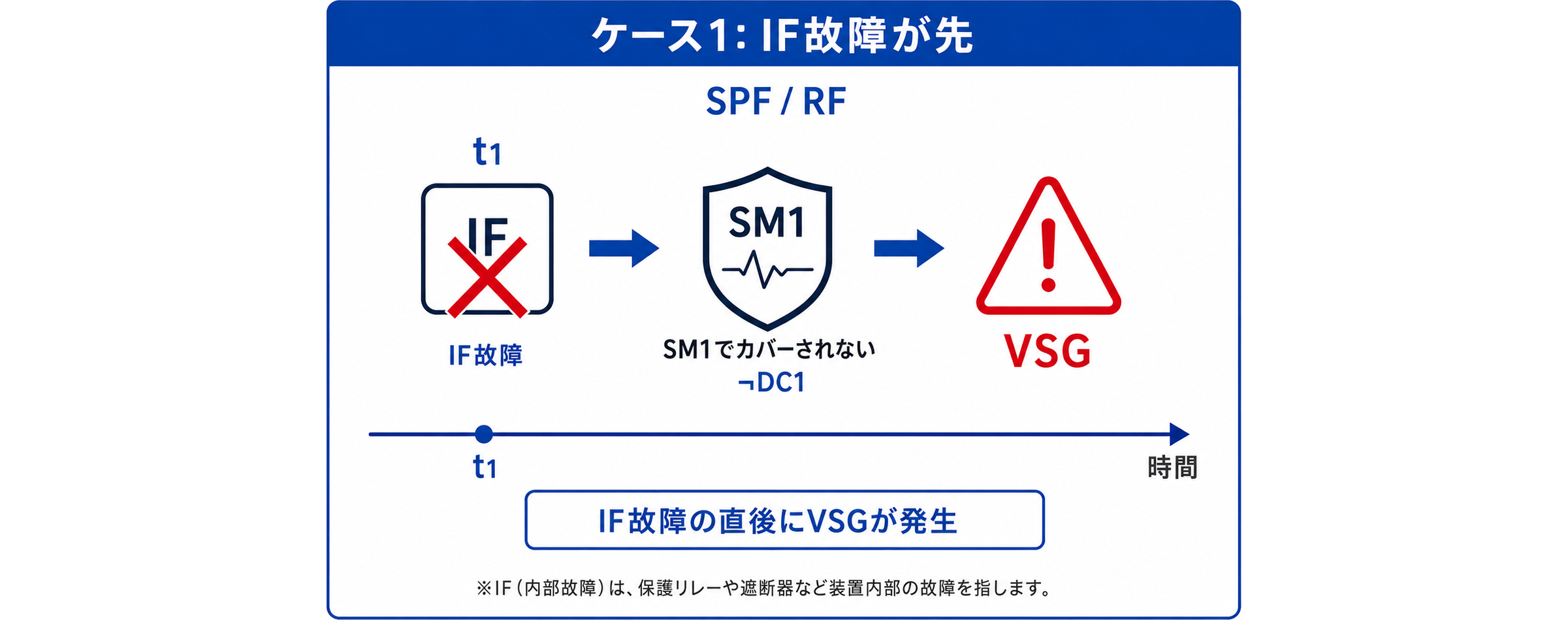
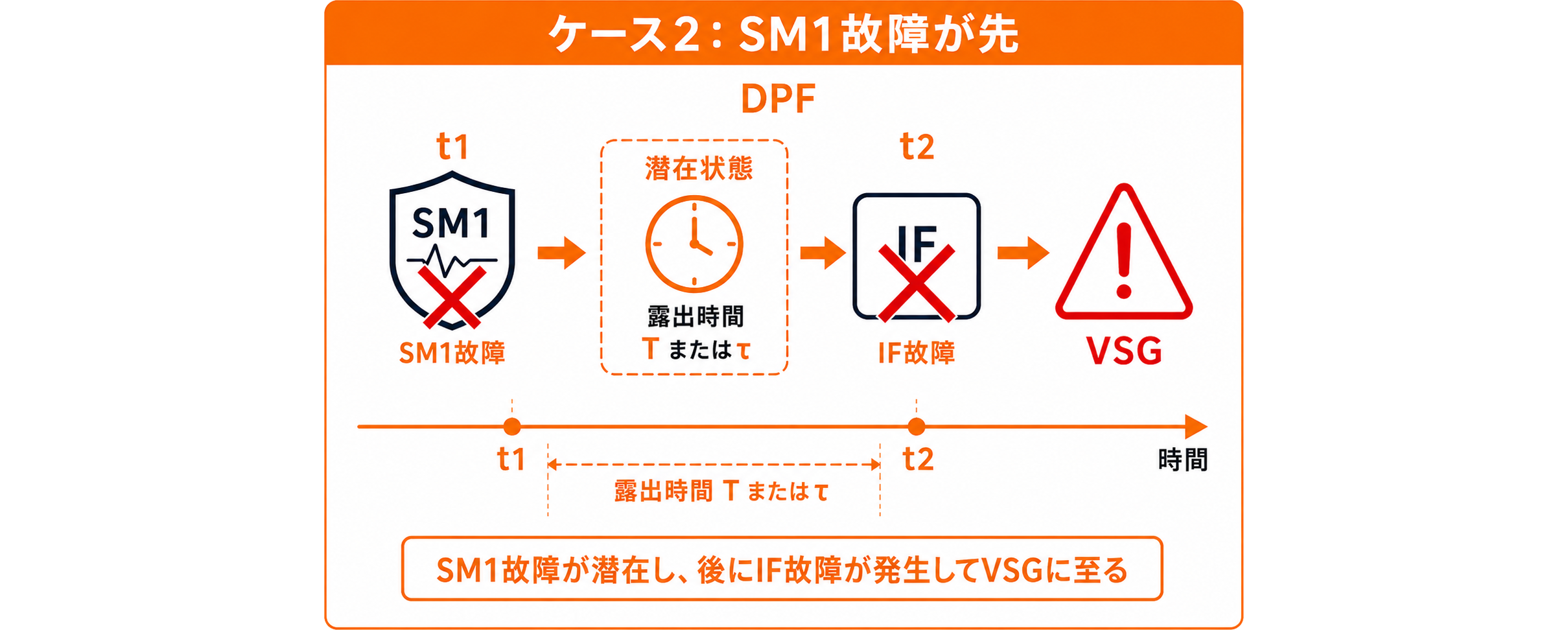
ここで、$\overline{SM}_{\sigma_\text{IF}}$は、IF故障時点$\sigma_\text{IF}$においてSM1が故障状態であることを表します。連続時間では、IF故障とSM1故障が同時に発生する確率はほとんど確実に0です。したがって、IF故障時点でSM1が故障していることは、SM1故障がIF故障より前に発生していたことを意味します。
この時間順序を表すため、次の記号を導入します。
$$
A\prec_L B\Longleftrightarrow A\text{が先に発生し、その後、暴露時間}L\text{以内に}B\text{が発生する}\\
A\prec_L B\Longleftrightarrow \sigma_A<\sigma_B\le\sigma_A+L
\tag{1081.3}
$$
この記号により、DPF枝は次のように書き直せます。
$$
\{VSG_\text{DPF}\}\equiv\{\overline{SM}\prec_L(\overline{IF}\cap DC_1)\}
\tag{1081.4}
$$
(1081.4)は、SM1故障が先に発生し、その後、SM1によりVSG抑止されるはずだったIF故障が発生する枝です。この枝では、IF故障はSM1のカバレッジ内にありますが、SM1が先に故障しているため、IF故障時点でVSG抑止が成立しません。
次に、SM1故障の暴露時間を考えます。SM1故障がSM2により検出または修理されるかどうかにより、暴露時間は変わります。
SM2により検出されない場合、SM1故障は寿命$T$の間に潜在し得ます。一方、SM2により検出または修理される場合、SM1故障の暴露時間は点検間隔$\tau$に制限されます。
したがって、DPF枝は次の2つの排反事象に分解されます。
$$
\begin{eqnarray}
\left\{
\begin{array}{l}
\{VSG_\text{DPF}\}=\{VSG_\text{MPF,lat}\}\sqcup\{VSG_\text{MPF,det}\}\\
\{VSG_\text{MPF,lat}\}\equiv\{(\overline{SM}\cap\overline{DC_2})\prec_T(\overline{IF}\cap DC_1)\}\\
\{VSG_\text{MPF,det}\}\equiv\{(\overline{SM}\cap DC_2)\prec_\tau(\overline{IF}\cap DC_1)\}
\end{array}
\right.
\end{eqnarray}
\tag{1081.5}
$$
第1枝は、SM1故障がSM2により検出されない枝です。この枝では、暴露時間は$T$です。第2枝は、SM1故障がSM2により検出または修理される枝です。この枝では、暴露時間は$\tau$です。
ここから、各枝の確率をレアイベント近似で求めます。故障率$\lambda_X$を持つエレメント$X$が時間$L$内に故障する確率を、次のように近似します。
$$
\Pr\{\overline{X}\text{ in }L\}\approx\lambda_XL
\tag{1081.6}
$$
また、独立な2つの故障$A$と$B$について、時間$L$内で両方が発生する場合、$A$が先で$B$が後となる順序は、全体の半分として扱えます。
$$
\Pr\{A\prec_LB\}\approx\frac{1}{2}\Pr\{A\text{ in }L\}\Pr\{B\text{ in }L\}
\tag{1081.7}
$$
まず、SPF/RF枝を求めます。この枝では、IF故障がSM1のカバレッジ外にあります。
$$
\begin{eqnarray}
\{VSG_\text{SPF/RF}\}
&\equiv&
\{\overline{IF}\cap\overline{DC_1}\}\\
PMHF_\text{SPF/RF}(T)
&=&\frac{1}{T}\Pr\{VSG_\text{SPF/RF}\}\\
&=&\frac{1}{T}\Pr\{\overline{IF}\cap\overline{DC_1}\}\\
&\approx&\frac{1}{T}(1-DC_1)\lambda_\text{IF}T\\
&=&(1-DC_1)\lambda_\text{IF}
\end{eqnarray}
\tag{1081.8}
$$
次に、MPF latent枝を求めます。この枝では、SM1故障がSM2により検出されず、暴露時間は$T$です。したがって、SM1故障が先に発生し、その後にIF故障が発生する順序付き二重故障として、次のようになります。
$$
\begin{eqnarray}
\{VSG_\text{MPF,lat}\}
&\equiv&
\{(\overline{SM}\cap\overline{DC_2})\prec_T(\overline{IF}\cap DC_1)\}\\
PMHF_\text{MPF,lat}(T)
&=&\frac{1}{T}\Pr\{VSG_\text{MPF,lat}\}\\
&\approx&\frac{1}{T}\cdot\frac{1}{2}(1-DC_2)\lambda_\text{SM}T\cdot DC_1\lambda_\text{IF}T\\
&=&\frac{1}{2}DC_1\lambda_\text{IF}\lambda_\text{SM}(1-DC_2)T
\end{eqnarray}
\tag{1081.9}
$$
次に、MPF detected枝を求めます。この枝では、SM1故障がSM2により検出または修理されるため、暴露時間は$\tau$です。
$$
\begin{eqnarray}
\{VSG_\text{MPF,det}\}
&\equiv&
\{(\overline{SM}\cap DC_2)\prec_\tau(\overline{IF}\cap DC_1)\}\\
PMHF_\text{MPF,det}(T)
&=&\frac{1}{T}\Pr\{VSG_\text{MPF,det}\}\\
&\approx&\frac{1}{T}\cdot\frac{1}{2}DC_2\lambda_\text{SM}T\cdot DC_1\lambda_\text{IF}\tau\\
&=&\frac{1}{2}DC_1\lambda_\text{IF}\lambda_\text{SM}DC_2\tau
\end{eqnarray}
\tag{1081.10}
$$
以上より、IFUの場合のPMHFは、SPF/RF枝、MPF latent枝、MPF detected枝の和として得られます。
$$
\begin{eqnarray}
PMHF_\text{IFU}(T)
&\approx&PMHF_\text{SPF/RF}(T)+PMHF_\text{MPF,lat}(T)+PMHF_\text{MPF,det}(T)\\
&\approx&(1-DC_1)\lambda_\text{IF}
+\frac{1}{2}DC_1\lambda_\text{IF}\lambda_\text{SM}(1-DC_2)T
+\frac{1}{2}DC_1\lambda_\text{IF}\lambda_\text{SM}DC_2\tau\\
&=&(1-DC_1)\lambda_\text{IF}
+\frac{1}{2}DC_1\lambda_\text{IF}\lambda_\text{SM}\{(1-DC_2)T+DC_2\tau\}
\end{eqnarray}
\tag{1081.11}
$$
最後に、規格の記法に合わせて、$DC_1=K_{\text{SM1,RF}}$、$DC_2=K_{\text{SM2,DPF}}$と置きます。
$$
\begin{eqnarray}
PMHF_\text{IFU}(T)
&\approx&
(1-K_{\text{SM1,RF}})\lambda_\text{IF}\\
&&+\frac{1}{2}K_{\text{SM1,RF}}\lambda_\text{IF}\lambda_\text{SM}
\{(1-K_{\text{SM2,DPF}})T+K_{\text{SM2,DPF}}\tau\}
\end{eqnarray}
\tag{1081.12}
$$
これにより、IFUの場合のPMHF式が得られました。
この導出では、まずVSGをSPF/RF枝とDPF枝に分解し、次にDPF枝を暴露時間$T$の枝と$\tau$の枝に分解しました。その結果、$DC_1$はIF故障がSM1によりVSG抑止される範囲を表し、$DC_2$はSM1故障の暴露時間を$T$から$\tau$へ短縮する割合として現れます。
 前のブログ
次のブログ
前のブログ
次のブログ