同じ IF/SM サブシステムアーキテクチャにおける $f_\text{VSG}(t)$ と $w_\text{VSG}(t)$ の厳密導出
本稿では、その高次差をまだ落とさずに、同じ IF と SM から成る非冗長サブシステムアーキテクチャの上で、PMHF 側の VSG 初回到達密度 $f_\text{VSG}(t)$ と PFH 側の VSG 発生頻度 $w_\text{VSG}(t)$ を厳密に導出します。
ここでは、IF と SM に対応する確率過程をそれぞれ $(\eta_t^\text{IF})_{t\ge0}$ および $(\eta_t^\text{SM})_{t\ge0}$ とします。IF の稼働集合を $\mathcal M_\text{IF}$、SM の潜在故障集合を $\mathcal P_\text{SM}$ とします。また、IF の危険故障モード集合を SPF 寄与集合と DPF 寄与集合に
$$
\mathcal P_\text{IF}=\mathcal P_\text{IF,SPF}\cup\mathcal P_\text{IF,DPF},
\qquad
\mathcal P_\text{IF,SPF}\cap\mathcal P_\text{IF,DPF}=\varnothing
\tag{1073.1}
$$
と分割します。
このとき、IF の SPF 側および DPF 側への条件付き遷移率、すなわち Vesely 故障率を
$$
\lambda_{V,\text{IF,SPF}}(t)=\lim_{dt\to0}\frac{\Pr\{\eta_{t+dt}^\text{IF}\in\mathcal P_\text{IF,SPF}\mid\eta_t^\text{IF}\in\mathcal M_\text{IF}\}}{dt}
\tag{1073.2}
$$
および
$$
\lambda_{V,\text{IF,DPF}}(t)=\lim_{dt\to0}\frac{\Pr\{\eta_{t+dt}^\text{IF}\in\mathcal P_\text{IF,DPF}\mid\eta_t^\text{IF}\in\mathcal M_\text{IF}\}}{dt}
\tag{1073.3}
$$
と定義します。
まず PMHF 側を考えます。VSG の累積発生回数を表す計数過程を $(N_t^\text{VSG})_{t\ge0}$ とし、その初回発生時刻を
$$
\sigma_\text{VSG}=\inf\{t\ge0\mid N_t^\text{VSG}\ge1\}
\tag{1073.4}
$$
とします。PMHF 側では、時刻 $t$ までにまだ VSG が一度も発生していない条件の下でのみ、VSG 到達を数えます。
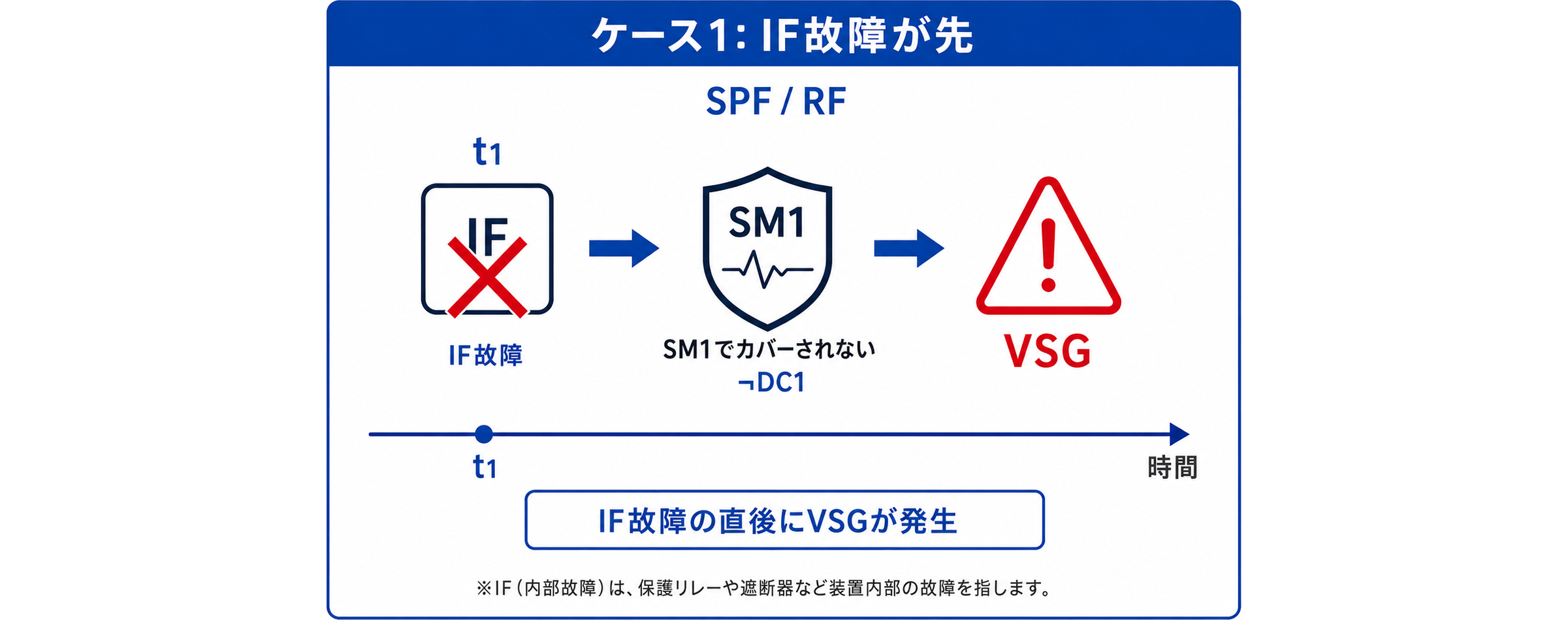
まず SPF 項について、時刻 $t$ までにまだ VSG が起きておらず、かつ IF が稼働集合にあるとき、その後の微小時間 $dt$ の間に IF の SPF 側故障によって VSG に到達する確率は
$$
\begin{eqnarray}
&&F_\text{SPF}(t+dt)-F_\text{SPF}(t)\\
&=&\Pr\{\sigma_\text{VSG}>t,\ \eta_t^\text{IF}\in\mathcal M_\text{IF},\eta_{t+dt}^\text{IF}\in\mathcal P_\text{IF,SPF}\}\\
&=&\Pr\{\eta_{t+dt}^\text{IF}\in\mathcal P_\text{IF,SPF}\ |\ \sigma_\text{VSG}>t,\ \eta_t^\text{IF}\in\mathcal M_\text{IF}\}
\Pr\{\eta_t^\text{IF}\in\mathcal M_\text{IF}\ |\ \sigma_\text{VSG}>t\}\Pr\{\sigma_\text{VSG}>t\}\\
&=&\lambda_{V,\text{IF,SPF}}(t)\cdot 1\cdot R_\text{IF}(t)dt+o(dt)
\end{eqnarray}
\tag{1073.5}
$$
です。さらに、
$$
\lambda_{V,\text{IF,SPF}}(t)dt=\Pr\{\sigma_\text{IF}>t\}\Pr\{\sigma_\text{IF}\in[t, t+dt)\ |\ \sigma_\text{IF}>t\}\\
=R_\text{IF}(t)\lambda_{\text{IF,SPF}}dt+o(dt)
\tag{1073.6}
$$
本稿は上式に誤りが見つかったのでこの訂正記事を出しています。
を代入してから、$dt$ で割り$dt\to0$ とすると、PMHF 側の SPF 到達密度は
$$
f_\text{SPF}(t)=R_\text{IF}(t)^2\lambda_{\text{IF,SPF}}
\tag{1073.7}
$$
となります。
本稿は上式に誤りが見つかったのでこの訂正記事を出しています。
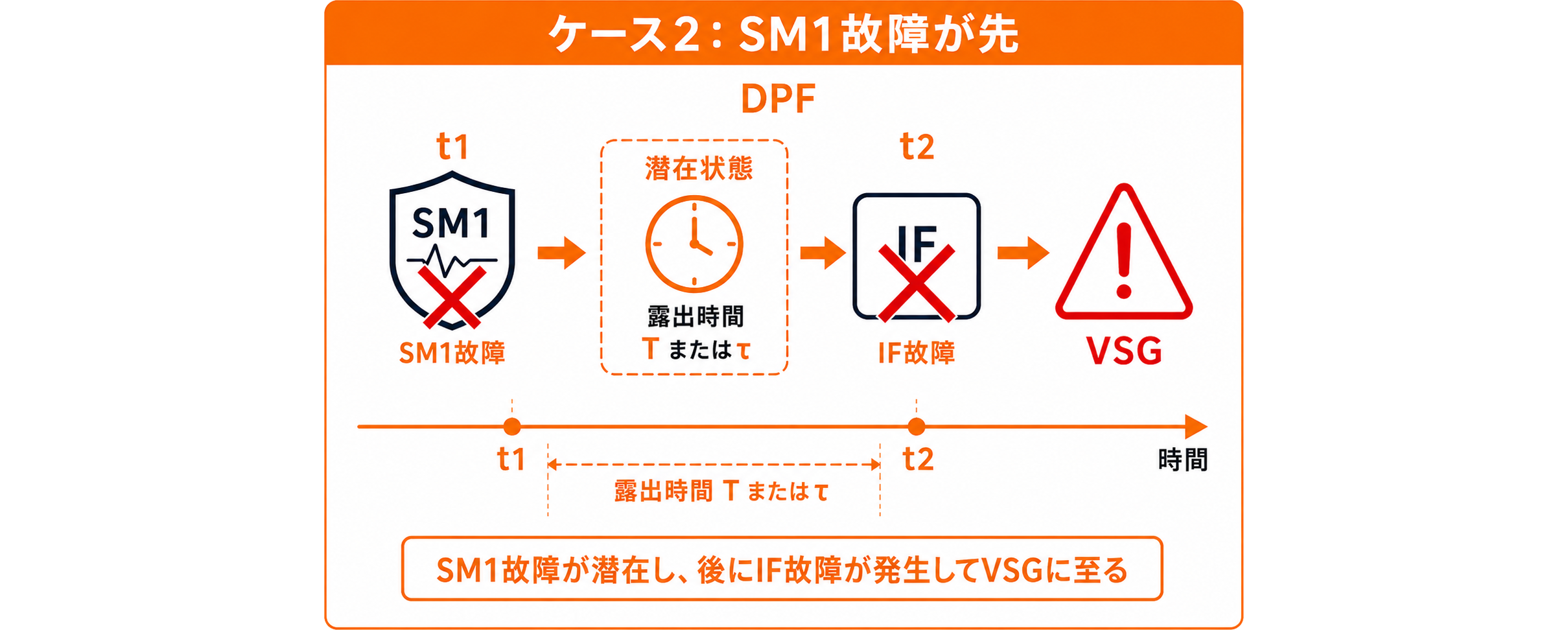
同様に DPF 項について、時刻 $t$ までにまだ VSG が起きておらず、かつ SM が潜在故障集合にあり IF が稼働集合にあるとき、その後の微小時間 $dt$ の間に IF の DPF 側故障によって VSG に到達する確率は
$$
\Pr\{\sigma_\text{VSG}>t,\ \eta_t^\text{SM}\in\mathcal P_\text{SM},
\eta_t^\text{IF}\in\mathcal M_\text{IF},\ \eta_{t+dt}^\text{IF}\in\mathcal P_\text{IF,DPF}\}\\
=\Pr\{\sigma_\text{VSG}>t,\ \eta_t^\text{SM}\in\mathcal P_\text{SM},\ \eta_t^\text{IF}\in\mathcal M_\text{IF}\}\lambda_{V,\text{IF,DPF}}dt+o(dt)
\tag{1073.8}
$$
です。したがって、PMHF 側の DPF 到達密度は
$$
f_\text{DPF}(t)=\Pr\{\sigma_\text{VSG}>t,\ \eta_t^\text{SM}\in\mathcal P_\text{SM},\ \eta_t^\text{IF}\in\mathcal M_\text{IF}\}\lambda_{V,\text{IF,DPF}}
\tag{1073.9}
$$
となります。
よって、PMHF 側の VSG 初回到達密度は
$$
\begin{eqnarray}
f_\text{VSG}(t)&=&f_\text{SPF}(t)+f_\text{DPF}(t)\\
&=&\Pr\{\sigma_\text{VSG}>t,\ \eta_t^\text{IF}\in\mathcal M_\text{IF}\}\lambda_{V,\text{IF,SPF}}\\
&&+\Pr\{\sigma_\text{VSG}>t,\ \eta_t^\text{SM}\in\mathcal P_\text{SM},\ \eta_t^\text{IF}\in\mathcal M_\text{IF}\}\lambda_{V,\text{IF,DPF}}
\tag{1073.10}
\end{eqnarray}
$$
です。
次に PFH 側を考えます。PFH では VSG の全発生回数を数えるので、時刻 $t$ における VSG 発生頻度 $w_\text{VSG}(t)$ を
$$
E\{N_{t+dt}^\text{VSG}-N_t^\text{VSG}\}=w_\text{VSG}(t)dt+o(dt)
\tag{1073.10}
$$
と定義します。
このとき、PFH 側の SPF 発生頻度は
$$
w_\text{SPF}(t)=\Pr\{\eta_t^\text{IF}\in\mathcal M_\text{IF}\}\lambda_{V,\text{IF,SPF}}
\tag{1073.12}
$$
であり、DPF 発生頻度は
$$
w_\text{DPF}(t)=\Pr\{\eta_t^\text{SM}\in\mathcal P_\text{SM},\ \eta_t^\text{IF}\in\mathcal M_\text{IF}\}\lambda_{V,\text{IF,DPF}}
\tag{1073.13}
$$
です。したがって、PFH 側の VSG 発生頻度は
$$
w_\text{VSG}(t)=w_\text{SPF}(t)+w_\text{DPF}(t)
\tag{1073.14}
$$
すなわち
$$
w_\text{VSG}(t)=\Pr\{\eta_t^\text{IF}\in\mathcal M_\text{IF}\}\lambda_{V,\text{IF,SPF}}\\
+\Pr\{\eta_t^\text{SM}\in\mathcal P_\text{SM},\ \eta_t^\text{IF}\in\mathcal M_\text{IF}\}\lambda_{V,\text{IF,DPF}}
\tag{1073.15}
$$
となります。
(1073.10) と (1073.15) を比べると、同じ IF/SM サブシステムアーキテクチャの下でも、PMHF 側の $f_\text{VSG}(t)$ と PFH 側の $w_\text{VSG}(t)$ は厳密には一致しません。その違いは、PMHF 側には「まだ VSG が一度も起きていない」ことを表す $\sigma_\text{VSG}>t$ の条件が入っているのに対し、PFH 側にはその条件が無いことです。
この差をそのまま書けば、
$$
w_\text{VSG}(t)-f_\text{VSG}(t)
=\Pr\{\sigma_\text{VSG}\le t,\ \eta_t^\text{IF}\in\mathcal M_\text{IF}\}\lambda_{V,\text{IF,SPF}}\\
+\Pr\{\sigma_\text{VSG}\le t,\ \eta_t^\text{SM}\in\mathcal P_\text{SM},\ \eta_t^\text{IF}\in\mathcal M_\text{IF}\}\lambda_{V,\text{IF,DPF}}
\tag{1073.16}
$$
となり、これは前二稿で見た「2 回目以降の VSG 発生の寄与」の時間局所版になっています。
以上より、同じ IF/SM サブシステムアーキテクチャにおいても、PMHF と PFH は厳密には異なる量であり、その違いは PMHF が初回発生だけを数え、PFH が全発生回数を数えるところから生じます。
 前のブログ
次のブログ
前のブログ
次のブログ