機能安全用語集
弊社機能安全情報で頻繁に使用される英語の意味をまとめたものです。内容は随時追加していきます。
AEB (Autonomous Emergency Braking)
Availability
稼働確率。時刻$t$におけるitemの稼働確率は以下の確率式で表される。
$$A_\text{item}(t):=\Pr \lbrace \text{(repairable)item up at }t \rbrace$$CTMC (Continous-time Markov Chains; 連続時間マルコフ連鎖)
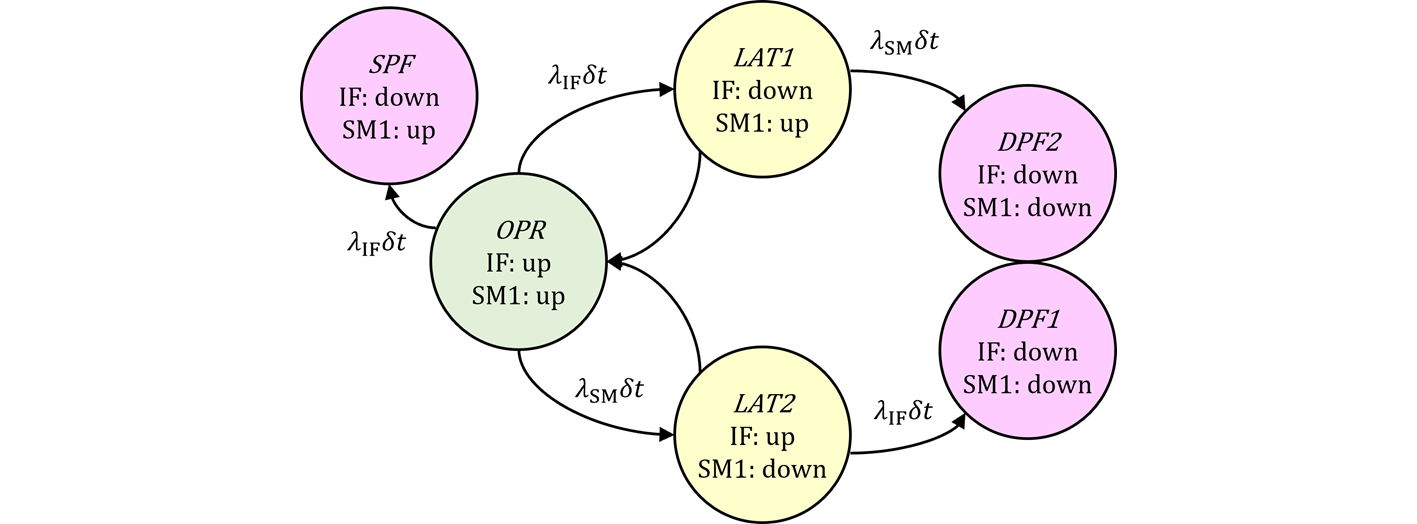
以下の図のように、状態確率を持つ複数のサークルと、それらの間で遷移する微小確率から構成される遷移図において、時間が連続的に変化するもの。
DC (Diagnostic Coverage)
診断カバー率。1st SMの属性であるVSG抑止率、2nd SMの属性である故障診断率ないしはLF抑止率。PMHFにおいては、以下のKパラメータがそれぞれのSMの属性である。
$K_\text{IF,FMC,RF}$---1st SMの属性であるIFのVSG抑止率
$K_\text{SM,FMC,MPF}$---2nd SMの属性である1st SMのレイテント抑止率(=故障診断率)
特にIFがリペアラブルである場合には
$K_\text{IF,FMC,MPF}$---2nd SMの属性であるIFのレイテント抑止率(=故障診断率)
DPF (Dual Point Fault/Dual Point Failure)
デュアルポイントフォールト、2点フォールト(もしくは故障)。あるIFもしくはSMのフォールトと、対応するSMもしくはIFのフォールトの2点フォールトをDPFと呼ぶ。それによりVSGとなる事象を故障、VSGの可能性がある事象をフォールトという。
ただし、デュアルポイントフォールトレイテント(LF)は、デュアルポイントフォールトという名前にもかかわらず、1点フォールトを意味する。1点目のフォールトが発生した段階で、別のエレメントの2点目のフォールトの可能性を考慮する必要がある。
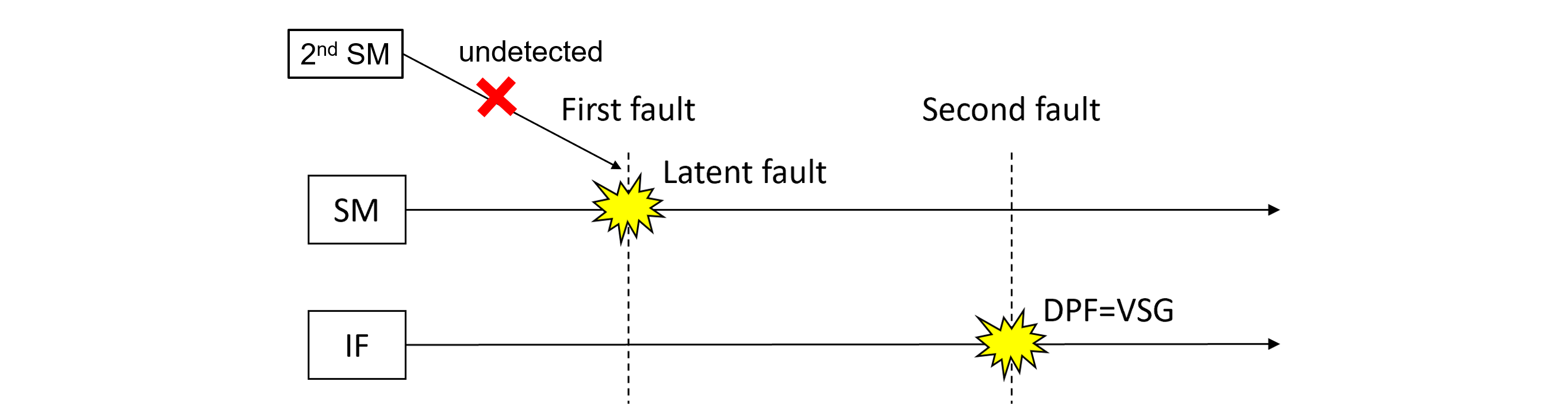
SMに1点目のフォールトが発生した場合を考えると、2nd SMにより検出されない場合それはLFとなる。将来的にIFにフォールトが起きる場合、LFとの組み合わせ(DPF)によりVSGが起きる。
注意:DPFは同時にフォールトが起きる事象ではない。確率論からは同時にフォールトが起きる事象の確率は0であるため。
EOTTI (Emergency Operation Tolerance Time Interval; 耐緊急操作許容時間間隔)
EPS (Electronic Power Steering)
Exposure Duration(暴露時間)
FMC (Failure Mode Coverage; 故障モード検出率)
FTA (Fault Tree Analysis; 故障木分析)
システムの望ましくない状態を頂上事象(Top Event)と置き、トップダウンにより、ブール代数を使用して基事象(Basic Event)を木構造により組み合わせる、演繹的な安全分析手法。定量FTAにおいては基事象は故障確率を持ち、頂上事象を侵害する確率の計算を実施する。
FTTI (Fault Tolerant Time Interval; 耐障害時間間隔)
IF (Intended Function)
意図機能。主機能とも言う。エレメントが本来持つべき機能であり、SMに対する用語。例:EPSであれば、ステアリングアシスト動作。AEBであればブレーキをかける動作。
なお、自動車において意図機能が機能失陥すると、人命に関わる事故につながることがある。例:EPSにおけるセルフステアリング(ドライバーの意図しないステアリングアシスト動作)、AEBにおける意図しない急ブレーキ等
LF (Latent Fault)
レイテントフォールト。潜在フォールト。正式名称は「マルチプルポイントフォールトレイテント」(もしくは「デュアルポイントフォールトレイテント」)だが、1点フォールトなのにマルチプルポイントやデュアルポイントの名前がついており、紛らわしいことに注意。
事象が起きた場合にVSGとなることは無いため、必ずフォールトになり、故障(フェイリャ)とはならない。
SMに1点目のフォールトが発生した場合を考えると、SMの機能失陥により、将来的に主機能の2点目のフォールトの可能性がある。1点目と2点目のフォールトの組み合わせ(DPF)によりVSGが起きる場合、1点目のフォールトが2nd SMにより検出されず、かつドライバーにも認識されない場合、そのフォールトをデュアルポイントフォールトレイテント、略してLFと呼ぶ。
MCS (Minimal Cut Set)
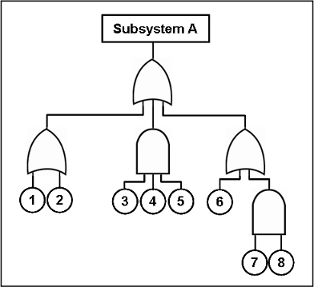
FTAにおいて、頂上事象をtrueとするための基事象の組み合わせのうち、最も少ない組み合わせのことをMC(Minimal Cut, 最小カット)と呼び、それら全体をMCS(Minimal Cut Set, 最小カット集合)と呼ぶ。
例:以下の図のMCがそれぞれ{1}、{2}、{3, 4, 5}, {6}, {7, 8}であるとき、それら全体をMCSと呼ぶ。
MF (Mission Function)
MPF (Multiple-point Fault/Multiple-point Failure)
複数点フォールト(もしくは故障)。ISO 26262では、3つ以上の同時故障事象の確率は通常非常に低いためセーフフォールトに分類されるので、MPFで重要なのはDPFのみとなり、MPFとDPFは同義的に用いられる。
それによりVSGとなる事象を故障、VSGの可能性がある事象をフォールトという。
MPFDI (Multiple-point Failure/Fault Detection Interval)
PMHF (Probabilistic Metric for random Hardware Failures)
アイテムの車両寿命における、不稼働確率の時間平均(弊社の定義)。不稼働確率は故障確率に近いが、故障後に定期検査により修理され、また稼働に戻る確率も含んだものである。
$$M_\text{PMHF}:=\frac{1}{T_\text{lifetime}}\Pr\{\text{item down at }T_\text{lifetime}\}$$なお、規格では2か所に以下のように記述されているが、いずれも不十分な表現。
“average probability of failure per hour over the operational lifetime of the item” [ISO 26262:2018 Part5 9.4.2.1 NOTE 1]
「アイテムの作動寿命間の毎時平均故障確率」
“Quantitative target values for the maximum probability of the violation of each safety goal at item level due to random hardware failures” [ISO 26262:2018 Part5 9.4.2.2]
「ランダムハードウェア故障によるアイテムレベルの各安全目標侵害の最大確率に対する定量的目標値」
「アイテムの作動寿命間における、ランダムハードウェア故障によるアイテムレベルの各安全目標侵害の最大確率の、毎時平均として表される定量的目標値」
Point availability
稼働確率。時刻$t$におけるitemの稼働確率は以下の確率式で表される。
$$A_\text{item}(t):=\Pr \lbrace \text{(repairable)item up at }t \rbrace$$PUA (Point UnAvailability)
PUD (Point Unavailability Density)
Reliability
信頼度。非修理システムにおいて、時刻$t$において稼働している確率。時刻$t$におけるitemの信頼度は以下の確率式で表される。
$$R_\text{item}(t):=\Pr \lbrace \text{(unrepairable)item not down in }(0, t] \rbrace$$RF (Residual Fault/Residual Failure)
レジデュアルフォールト、残余フォールト(または故障)。IFに1点フォールトが発生する場合、IFに対するSM(1st SM)によりフォールトがVSGとなるのを抑止するが、そのカバー範囲から漏れ、VSGとなるフォールトをRFと呼ぶ。それによりVSGとなる事象を故障、VSGの可能性がある事象をフォールトという。
PMHF計算においては、SPFとRFを合わせたものをRFと呼ぶことがある。これはSPF/RFと記述すべきところだが、一般的にSPFは少ないのでRFで代表させていると考えられる。
SG (Safety Goal)
SM (Safety Mechanism)
SPF (Single Point Fault/Single Point Failure)
Unreliability
不信頼度。非修理システムにおいて、時刻$t$において稼働していない確率。時刻$t$におけるitemの不信頼度は以下の確率式で表される。
$$F_\text{item}(t):=\Pr \lbrace \text{(unrepairable)item down in }(0, t] \rbrace$$