|
28 |
ISO 12489のFault Tree駆動マルコフモデル |
今回は余談で、参照論文から離れます。
信頼性工学に関するISOが存在し、それが以前もご紹介したISO 12489です。 ”Petroleum, petrochemical and natural gas industries - Reliability modelling and calculation of safety systems" (ISO/TR 12489:2013)という国際規格であり、本来は「石油、石油化学、天然ガス産業-信頼性モデリングと安全システムの計算」と訳されますが、中身はかなり数学的な定義が多いです。
信頼性関連で使用される用語の定義が数学的に書かれているのが特長です。
ここではその中の「8.5.ブール代数モデルによる計算」を見てみます。
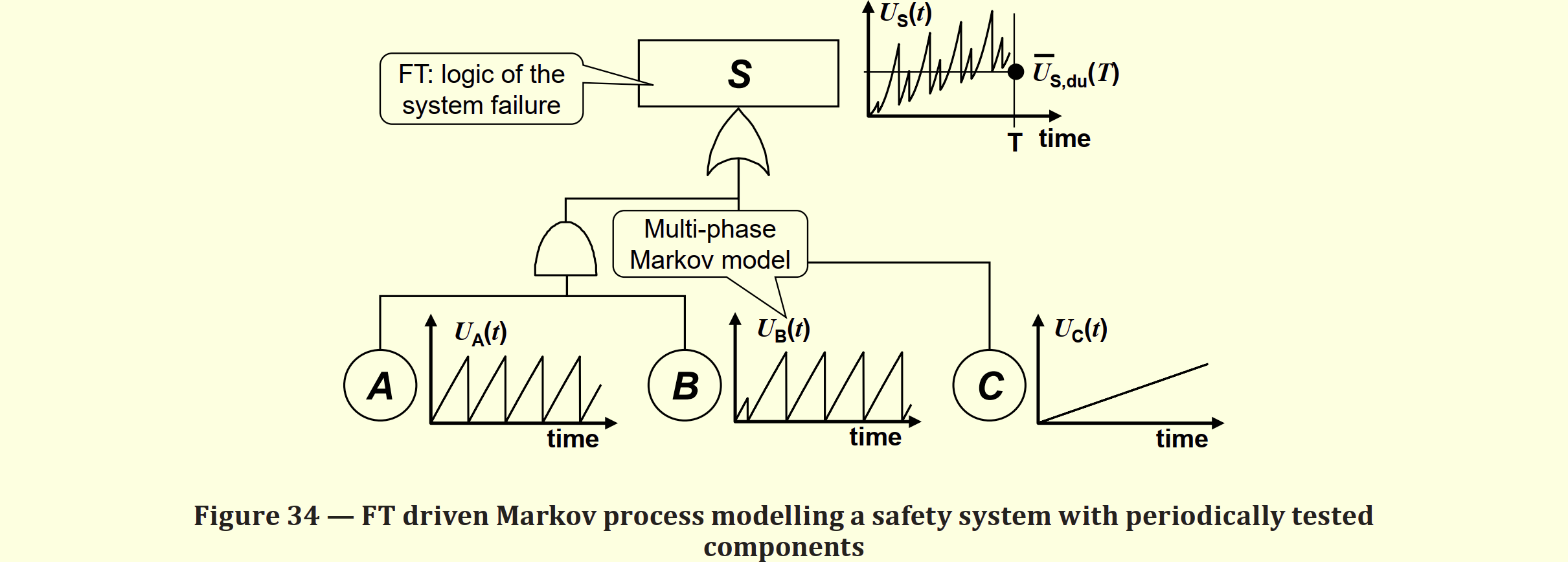
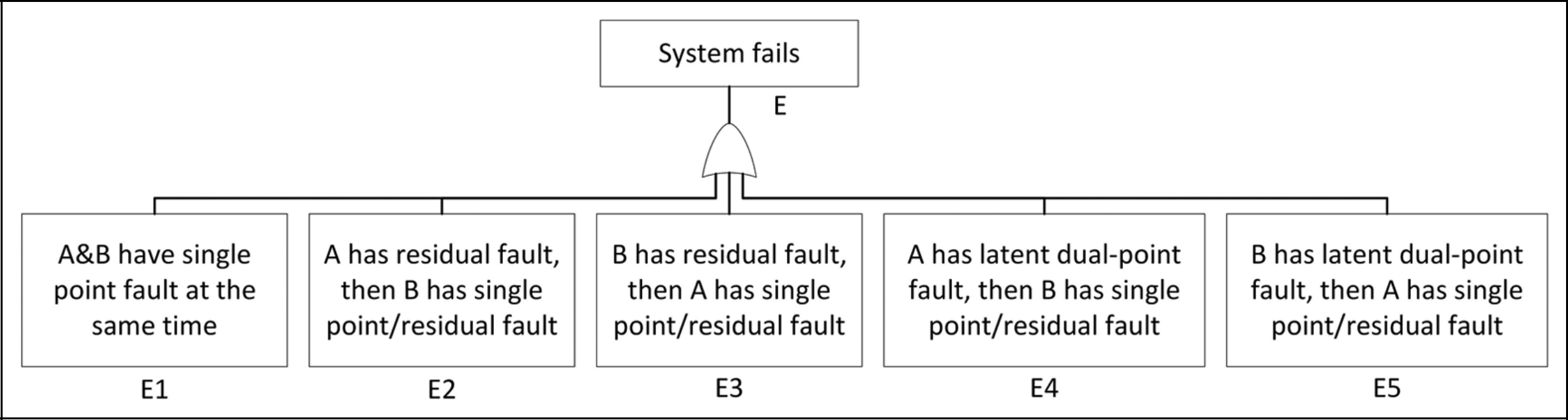
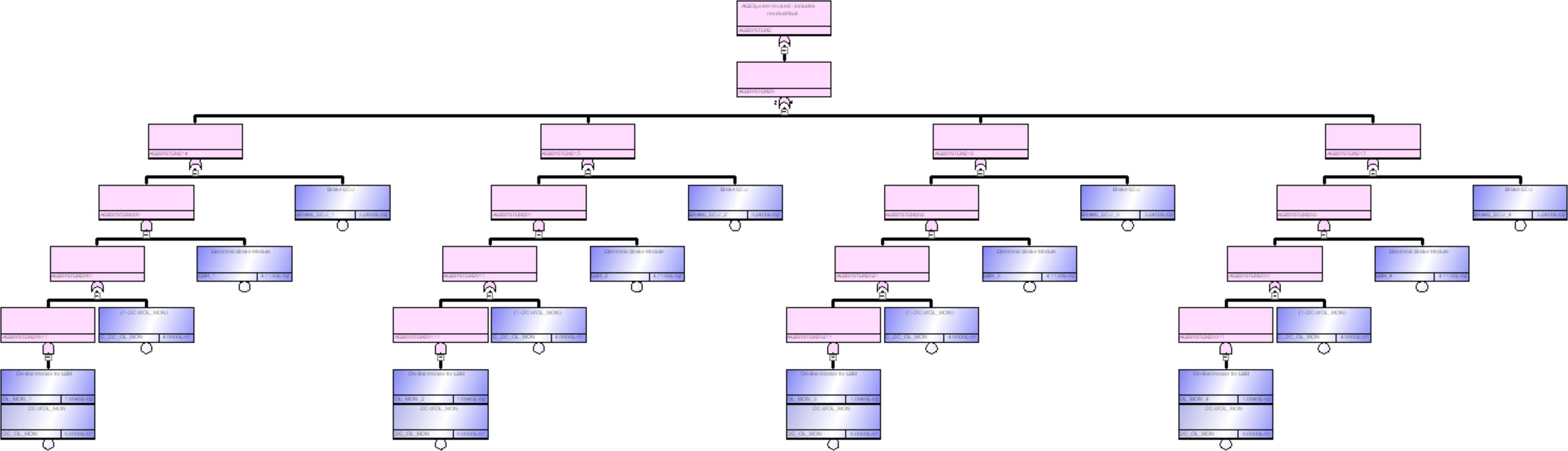
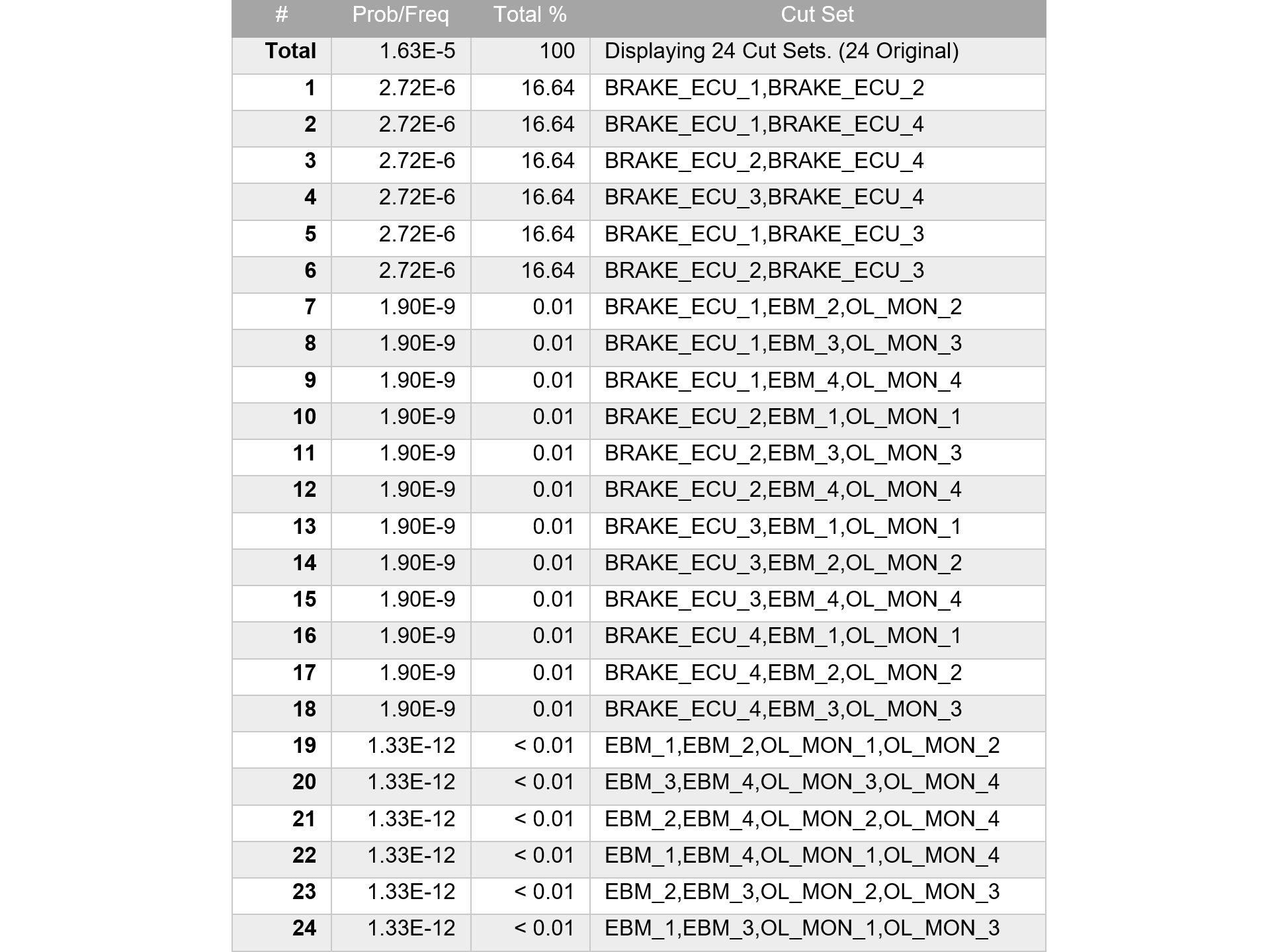
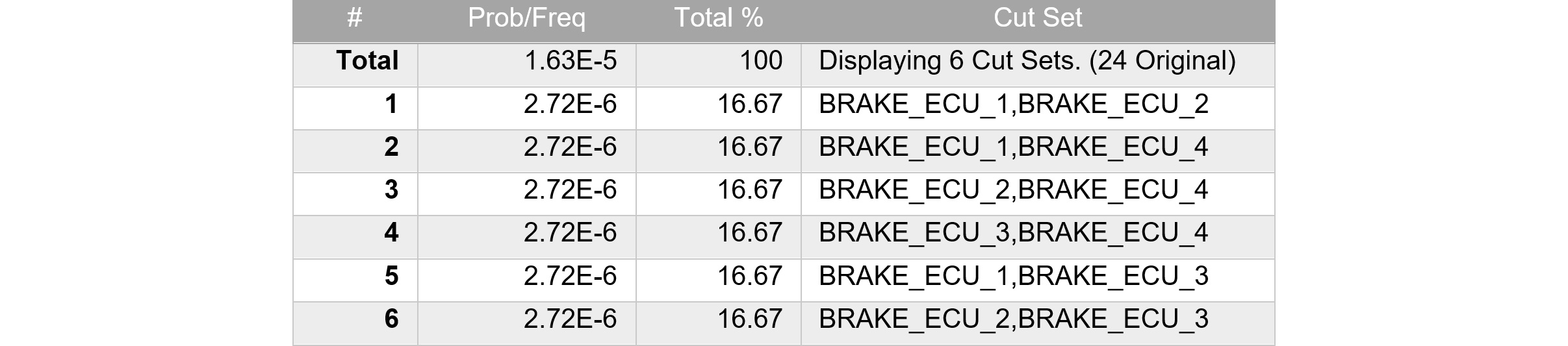
図211.1 は本ブログの方式と基本的には同一ですが、「FT駆動マルコフ過程モデリング」と書かれています。本ブログの方式はむしろ、(動的な)マルコフモデル駆動による(静的な)Fault Treeによる解析、と逆のように思います。本ブログの方式は、基事象にマルコフモデルを適用し、それを一旦静的なPMHF式に変換し、それに基づきFTを構築する流れであるためです。
本ブログの方式は、一見図211.1と同じように思われますが、根本的に異なります。ISO 26262では動的なマルコフモデルを確率積分し、あらかじめ平均PUDであるPMHF式を求めておくことにより、ISO 12489の図のような複雑な確率過程の計算をする必要が無いわけです。
ともあれ、規格は論文でもなければ教科書でもないと言えども、「マルコフ過程に基づいた確率微分方程式を積分したものがPMHF方程式である」という事実が全く書かれていないので、いろいろな人が試行錯誤しているのは無駄ではないでしょうか。より正しく効率的な運用をしたいと思い、このブログを書いています。
RAMS 2021において、PMHF式に基づくFTA構築法の論文発表が終了したため、本記事を開示します。