|
31 |
規格第2版のPMHF式の疑問 (14) |
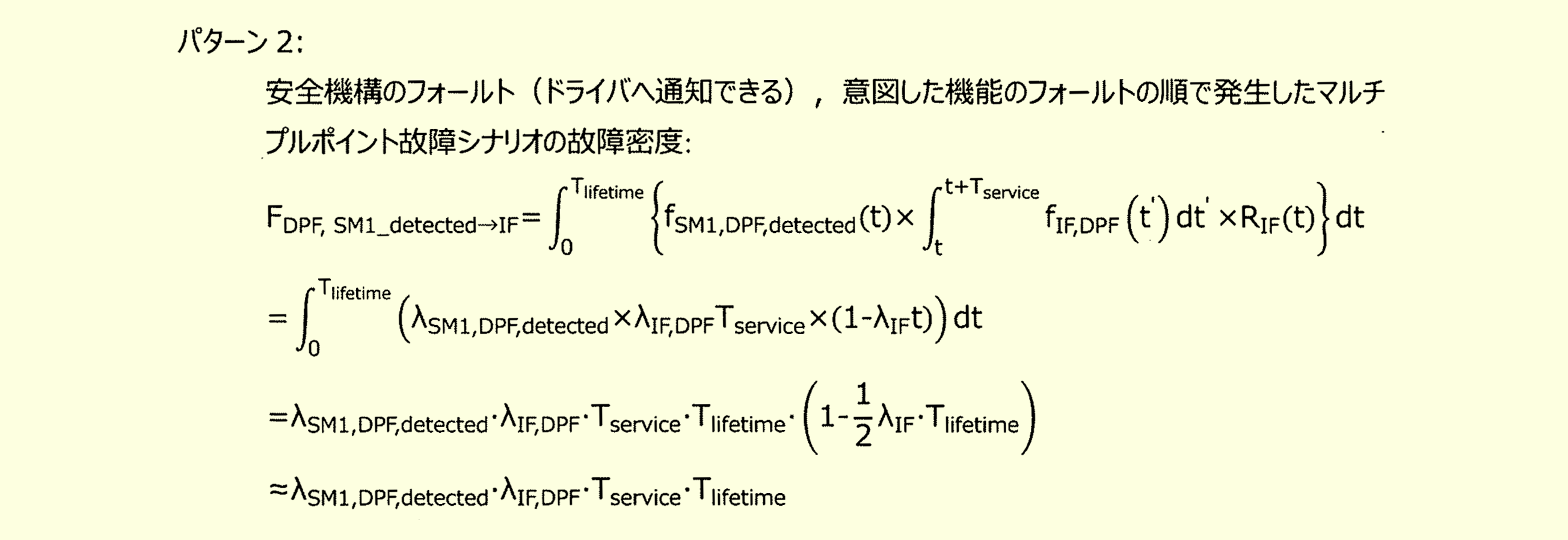
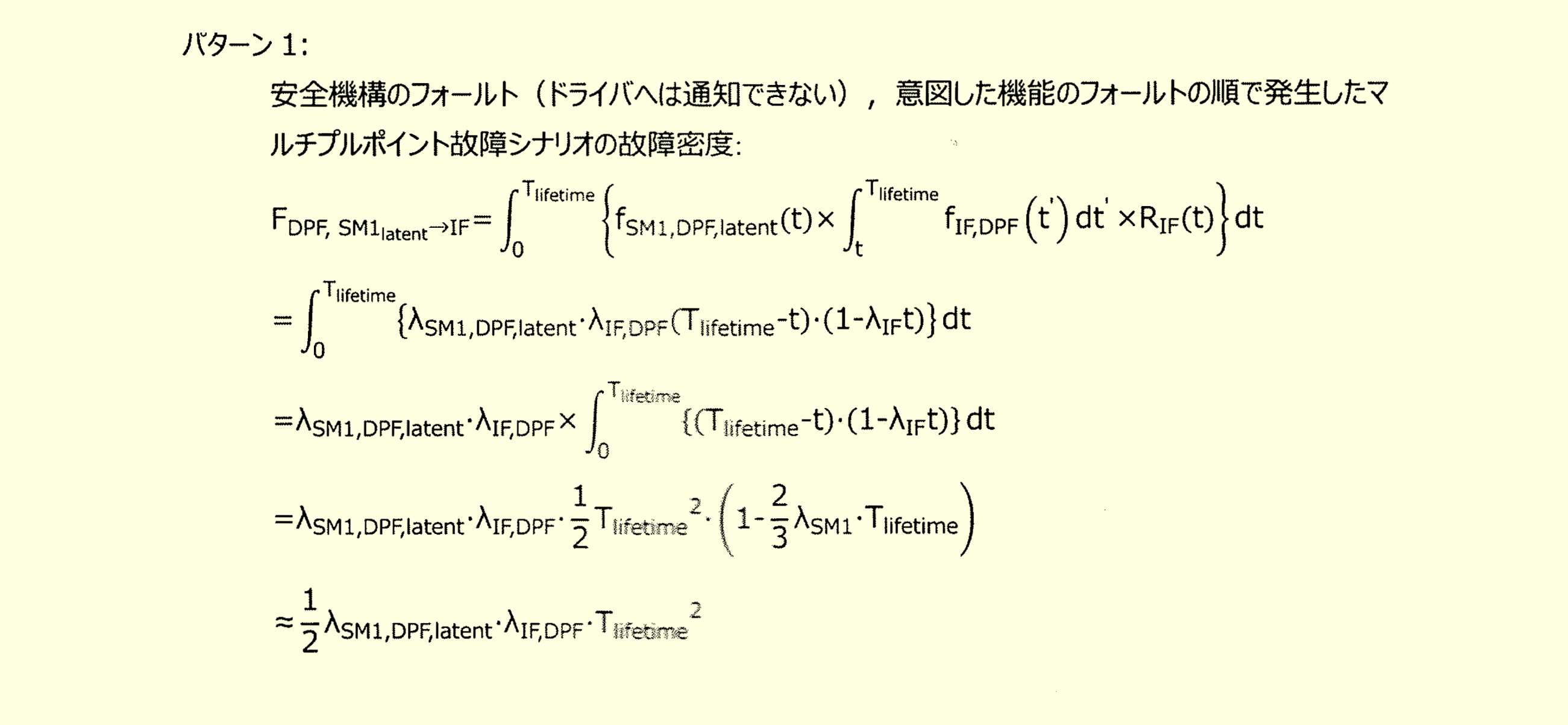
パターン1
規格解説書によるPMHF式の導出手法と、弊社による導出手法を比較します。簡単化のため(及びパターン2は解説書は積分範囲に誤りがあるため)、パターン1どうしを比較しそれぞれ規格解説書=com、弊社=fsmとします。
まず、規格解説書パターン1(476.6)は、 $$ \require{color} \definecolor{yellow}{rgb}{1.0,1.0,0.8} \definecolor{lime}{rgb}{0.8,1.0,0.9} \definecolor{water}{rgb}{0.8,0.9,1.0} \definecolor{pink}{rgb}{1.0,0.8,1.0} \definecolor{red}{rgb}{1.0,0.8,0.8} \definecolor{orange}{rgb}{1.0,0.9,0.8} M_\text{PMHF,com,P1}=\frac{1}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}d\!\Pr\{\text{SM1 down in }[t, t+\delta t)\cap\text{SM1 up at }t\\ \cap\colorbox{pink}{$\text{SM1 undetected}$}\}\cdot\colorbox{lime}{$\Pr\{\text{IF up at }t \cap\text{IF fails in }[t, T_\text{lifetime})$}\\ \cap\colorbox{water}{$\text{IF prevented}$}\} \tag{478.1} $$
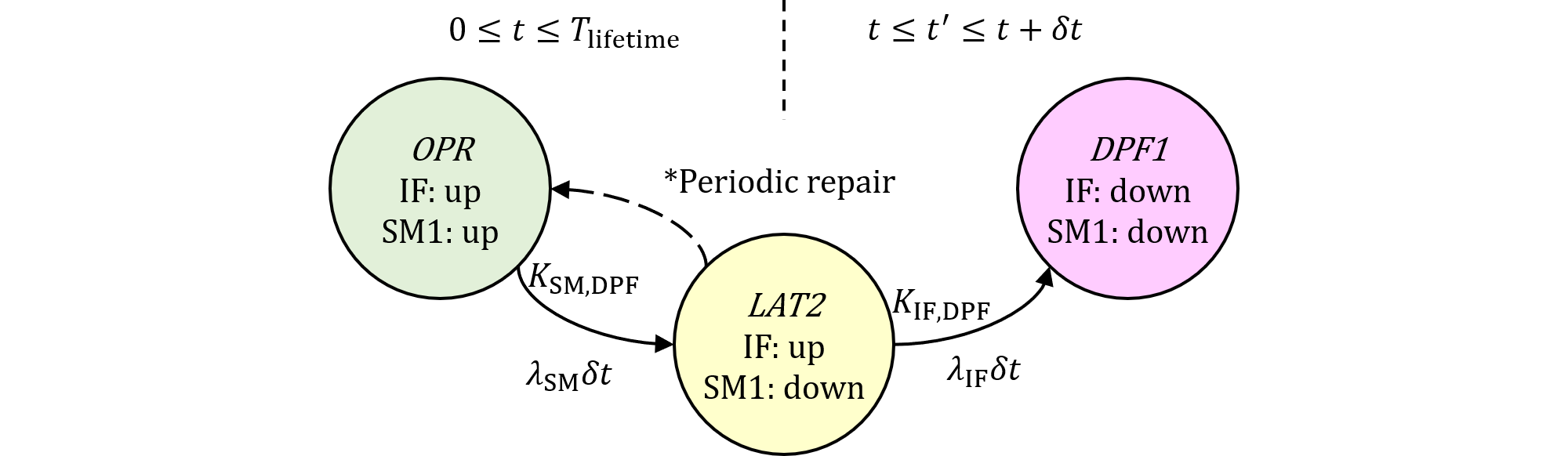
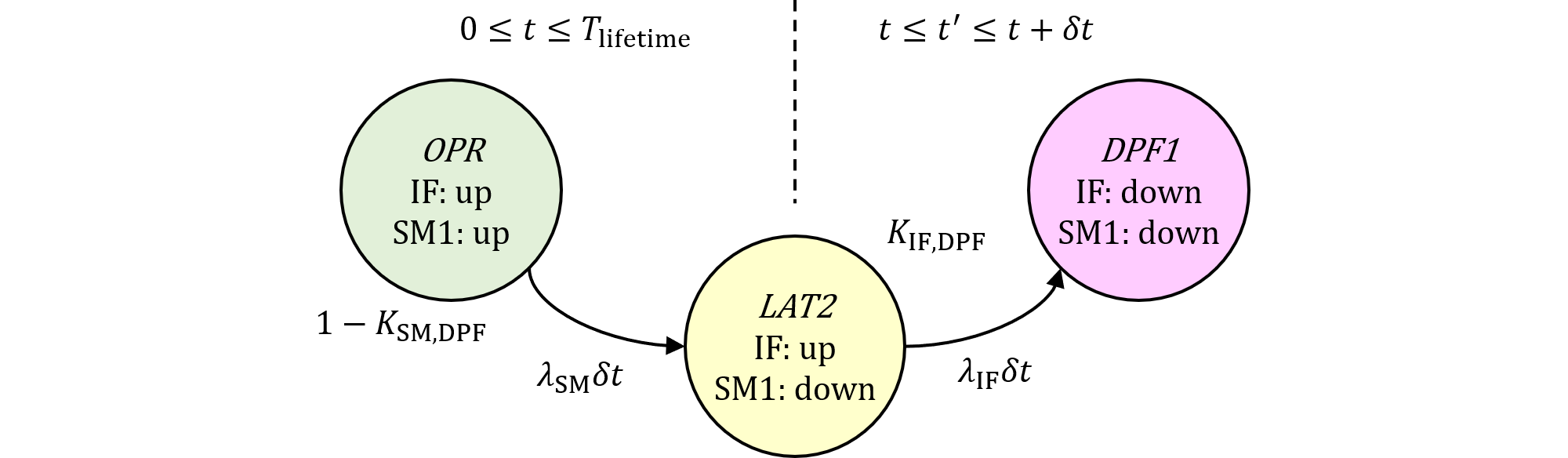
一方、弊社パターン1(474.5)は、 $$ M_\text{PMHF,fsm,P1}=\frac{1}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}d\!\Pr\{\colorbox{orange}{$\text{LAT2 at }t$}\cap\colorbox{water}{$\text{IF prevented}$}\\ \cap\text{IF down in }(t', t'+\delta t']\}\\ =\frac{1}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}d\!\Pr\{\text{IF up at }t'\cap\colorbox{orange}{$\text{SM1 down at }t$}\cap\colorbox{pink}{$\text{SM1 not detected}$}\\ \cap\colorbox{water}{$\text{IF prevented}$}\cap\text{IF down in }(t', t'+\delta t']\}\\ =\frac{1}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}\colorbox{orange}{$\Pr\{\text{SM1 fails in }[0, t)$}\cap\colorbox{pink}{$\text{SM1 not detected}$}\}\\ \cdot d\!\Pr\{\text{IF down in }[t', t'+\delta t')\cap\text{IF up at }t'\cap\colorbox{water}{$\text{IF prevented}$}\} \tag{478.2} $$ でした。
ここで、以下(478.3)の2つの確率 $$ \begin{eqnarray}\begin{cases} \Pr\{\colorbox{pink}{$\text{SM1 undetected}$}\}=\colorbox{pink}{$1-K_\text{SM1,DPF}$}\\ \Pr\{\colorbox{water}{$\text{IF prevented}$}\}=\colorbox{water}{$K_\text{IF,DPF}$} \end{cases}\end{eqnarray}\tag{478.3} $$ は定数であることから、この(478.3)を代入すれば、(478.1)は、 $$ (478.1)=M_\text{PMHF,com,P1}=\frac{1}{T_\text{lifetime}}\colorbox{water}{$K_\text{IF,DPF}$}\colorbox{pink}{$(1-K_\text{SM1,DPF})$}\\ \cdot\int_0^{T_\text{lifetime}}d\!\Pr\{\text{SM1 down in }[t, t+\delta t)\cap\text{SM1 up at }t\}\\ \cdot\colorbox{lime}{$\Pr\{\text{IF up at }t'\cap\text{IF fails in }[t, T_\text{lifetime})\}$} \tag{478.4} $$ となり、(478.2)は、 $$ (478.2)=M_\text{PMHF,fsm,P1}=\frac{1}{T_\text{lifetime}}\colorbox{water}{$K_\text{IF,DPF}$}\colorbox{pink}{$(1-K_\text{SM1,DPF})$}\\ \cdot\int_0^{T_\text{lifetime}}\colorbox{orange}{$\Pr\{\text{SM1 fails in }[0, t')\}$}\cdot d\!\Pr\{\text{IF down in }[t', t'+\delta t')\cap\text{IF up at }t'\} \tag{478.5} $$ となります。それぞれに(66.4)を適用すれば、(478.4)は、 $$ (478.4)=M_\text{PMHF,com,P1}=\frac{1}{T_\text{lifetime}}\colorbox{water}{$K_\text{IF,DPF}$}\colorbox{pink}{$(1-K_\text{SM1,DPF})$}\\ \cdot\int_0^{T_\text{lifetime}}f_\text{SM1}(t)\colorbox{lime}{$\Pr\{\text{IF up at }t\cap\text{IF fails in }[t, T_\text{lifetime})\}$}dt\\ =\frac{1}{T_\text{lifetime}}\colorbox{water}{$K_\text{IF,DPF}$}\colorbox{pink}{$(1-K_\text{SM1,DPF})$}\\ \cdot\int_0^{T_\text{lifetime}}f_\text{SM1}(t)\colorbox{lime}{$\left[\Pr\{\text{IF fails in }[0, T_\text{lifetime})\}-\Pr\{\text{IF fails in }[0, t)\}\right]$}dt\\ =\frac{1}{T_\text{lifetime}}\colorbox{water}{$K_\text{IF,DPF}$}\colorbox{pink}{$(1-K_\text{SM1,DPF})$} \int_0^{T_\text{lifetime}}f_\text{SM1}(t)\colorbox{lime}{$\left[F_\text{IF}(T_\text{lifetime})-F_\text{IF}(t)\right]$}dt\\ \tag{478.6} $$ となり、(478.5)は、 $$ (478.5)=M_\text{PMHF,fsm,P1}\\ =\frac{1}{T_\text{lifetime}}\colorbox{water}{$K_\text{IF,DPF}$}\colorbox{pink}{$(1-K_\text{SM1,DPF})$}\int_0^{T_\text{lifetime}}\Pr\{\colorbox{orange}{$\text{SM1 fails in }[0, t')$}\}f_\text{IF}(t')dt'\\ =\frac{1}{T_\text{lifetime}}\colorbox{water}{$K_\text{IF,DPF}$}\colorbox{pink}{$(1- K_\text{SM1,DPF})$}\int_0^{T_\text{lifetime}}\colorbox{orange}{$F_\text{SM1}(t)$}f_\text{IF}(t)dt \tag{478.7} $$ となります。$t'$を$t$に置き換えても値は変わりません。(478.6)も(478.7)も結果式は同一であり、 $$ (478.6)=(478.7)=\frac{1}{2}K_\text{IF,DPF}K_\text{SM,DPF}\lambda_\text{IF}\lambda_\text{SM1}T_\text{service} \tag{478.8} $$ と、このように一致します。従って元の(478.1)と(478.2)は同値であるはずです。
ここで(478.6)、(478.7)のそれぞれの意味を解析してみます。(478.6)の解説書の方法は、
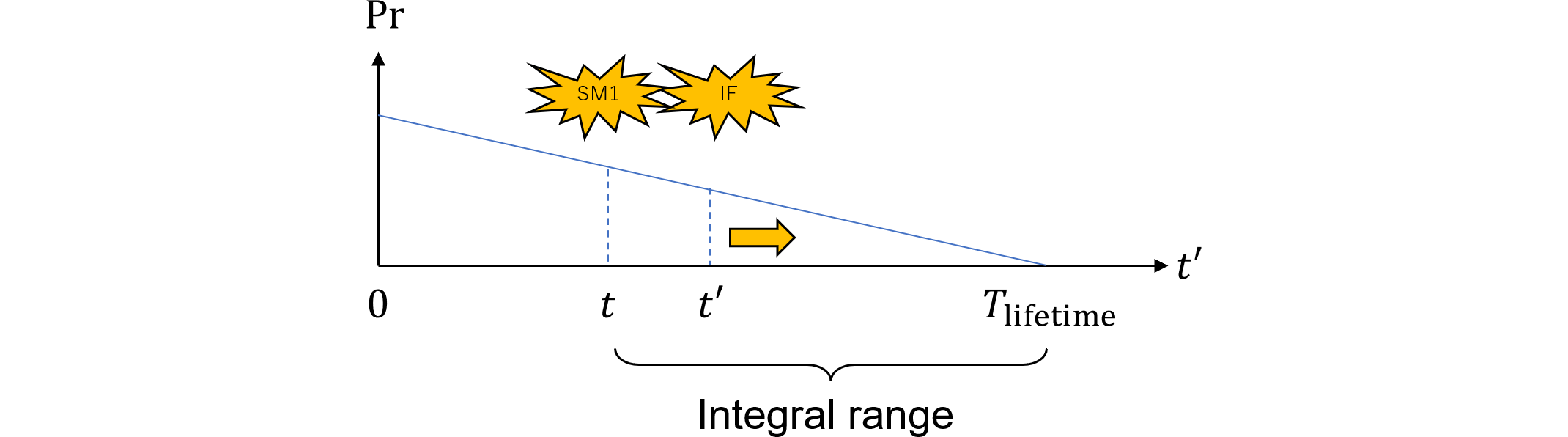
SM1のフォールトの確率密度を、$t$をSM1のフォールト時刻として0から車両寿命まで積分するにあたり、
- 0から$t$まではIFが先にフォールトしている場合のIFの先フォールトの確率(=確率密度の積分)
- $t$から車両寿命まではSM1が先にフォールトしている場合のIFの後フォールトの確率(=確率密度の積分)
の合計$\colorbox{lime}{$F_\text{IF}(T_\text{lifetime})$}$を求めます。これから1.$\colorbox{lime}{$F_\text{IF}(t)$}$を引けば、結果としてSM1⇒IFの順のDPF確率が求まります。
このようなことをせずにCTMCを用いて(478.7)のとおり、
IFのフォールトの確率密度を、$t'$をIFのフォールト時刻として0から車両寿命まで積分するにあたり、
- 0から$t'$まではSM1が先にフォールトしている場合のSM1の先フォールトの確率(=確率密度の積分)
である$\colorbox{orange}{$F_\text{SM1}(t')$}$を先に求めれば、結果としてDPFを単純に求めることができます。時系列的にもSM1⇒IFの順のフォールトなので、最初にSM1のフォールト確率積分をするほうが自然です。
なお、本稿はRAMS 2024に投稿予定のため一部を秘匿していますが、論文公開後の2024年2月頃に開示予定です。