|
13 |
ISO 26262のFTAに関する論文 (3) |
保守的なPMHF式
さらに、参照論文では不信頼度 $$F(t)=1-e^{-\lambda t}$$ を用いた非修理系として扱っていますが、これはISO 26262の考え方と合いません。規格では主機能と安全機構のDPFまで考慮する必要があり、安全機構は修理可能として扱います。そのため2nd order SMが必要であり、周期的な検出(検出周期=$\tau$)と修理(検出カバレッジ=$K_\text{SM,MPF}$)が前提となります。修理系において不信頼度$F(t)$は不稼働度$Q(t)$となり、
$$Q(t)=(1-K_\text{SM,MPF})F(t)+K_\text{SM,MPF}F(t\bmod\tau)\\ =(1-K_\text{SM,MPF})(1-e^{-\lambda t})+K_\text{SM,MPF}(1-e^{-\lambda(t\bmod\tau)})$$ これからPMHFを求めると、
$$M_\text{PMHF}=(1-K_\text{IF,RF})\lambda_\text{IF}+K_\text{IF,RF}\lambda_\text{IF}\lambda_\text{SM}[(1-K_\text{SM,MPF})T_\text{lifetime}+K_\text{SM,MPF}\tau]$$
ここでワーストケースを考え、2nd order SMが無い(カバレージがゼロ、$K_\text{SM,MPF}=0$として評価します。これは保守的な評価です。すると、上式のPMHFは、
$$M_\text{PMHF}=(1-K_\text{IF,RF})\lambda_\text{IF}+K_\text{IF,RF}\lambda_\text{IF}\lambda_\text{SM}T_\text{lifetime}\\ =\lambda_\text{IF}[(1-K_\text{IF,RF})+K_\text{IF,RF}\lambda_\text{SM}T_\text{lifetime}]$$ 従って、基本的にFTはこの評価式を実装することになります。
FTの書き換え
参照論文ではLFを考慮せずに、単純にDPFとしていましたが、上記のようにLFを考慮したほうが正確です。これを確率式で表せば、
$$(\lambda_\text{IF}T_\text{lifetime})(\lambda_\text{SM}T_\text{lifetime})\to(\lambda_\text{IF}T_\text{lifetime})[(1-K_\text{IF,RF})+K_\text{IF,RF}(\lambda_\text{SM}T_\text{lifetime})]$$
となり、図203.1のFTの書き換えのように構成します。図の左は参照論文のFTであり、右は変更後のFTです。
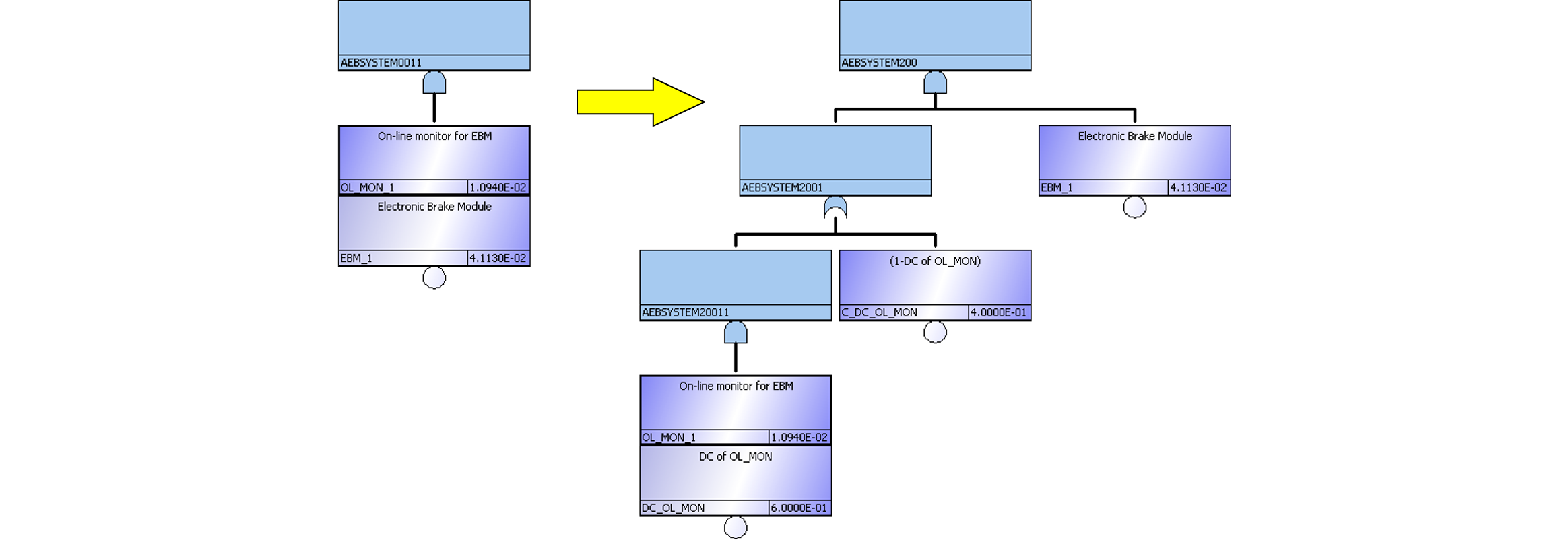
FTAツールは確率で取り扱い、ミッション時間の計算は自動的に行われるため、明示的に$T_\text{lifetime}$を掛ける必要はありません。
RAMS 2021において、PMHF式に基づくFTA構築法の論文発表が終了したため、本記事を開示します。

Leave a Comment