SAPHIREのFTL(Fault Tree Language)の文法を図215.1に示します。これで見ると分かるように、ゲートの記述がコメントとして書けるようです。
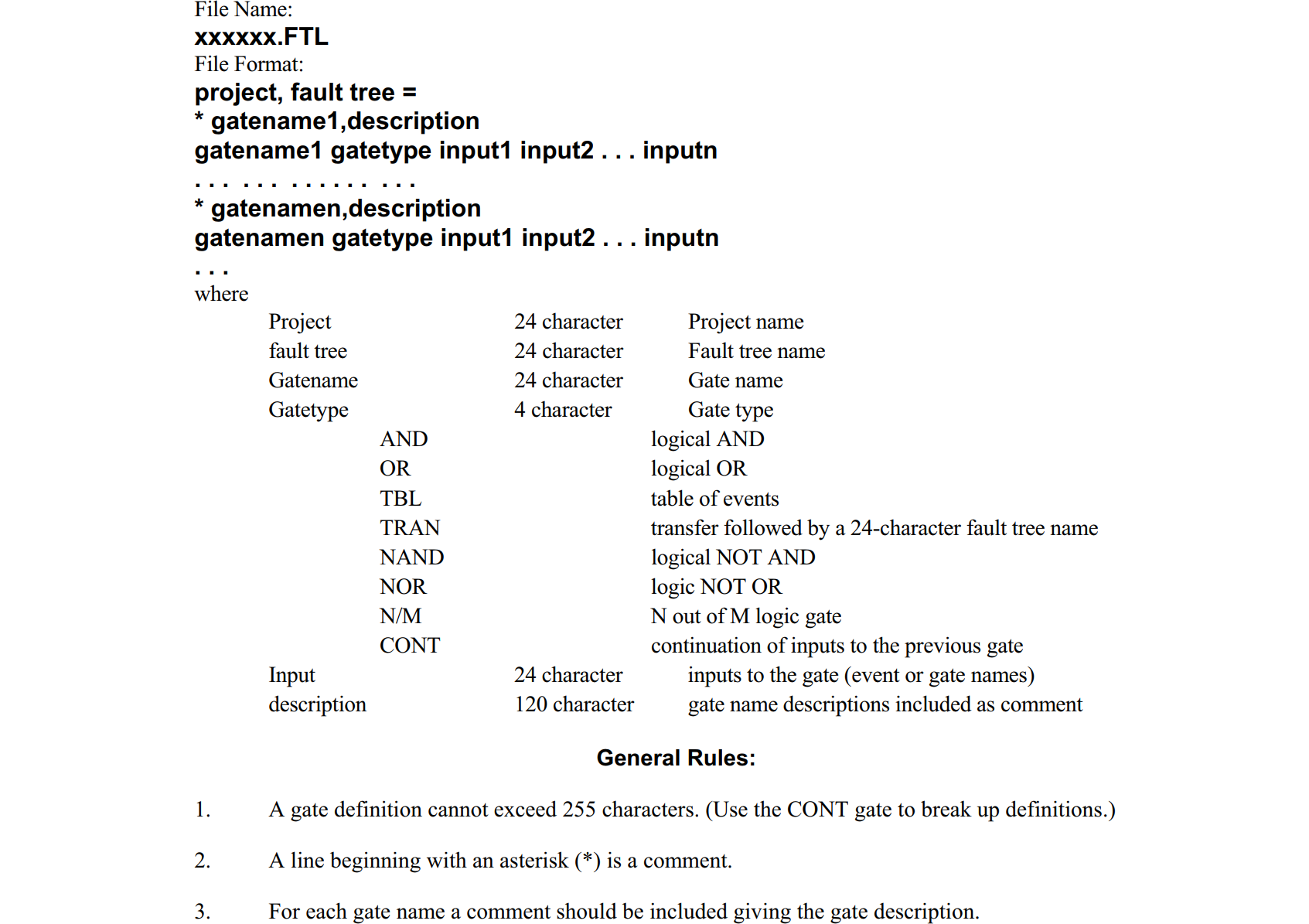 図215.1 FTLのフォーマット
図215.1 FTLのフォーマット
ただし、このように記述しインポートしても、モデルは作成されますがゲートの説明等の記述は入りませんでした。さらに、基事象は全てtoolにより作成済みである必要があります。
調べてみると、FTLのインポートではなく、MAR-D(各種データ)の一括インポートにより、完全なFTが構成できるようです。
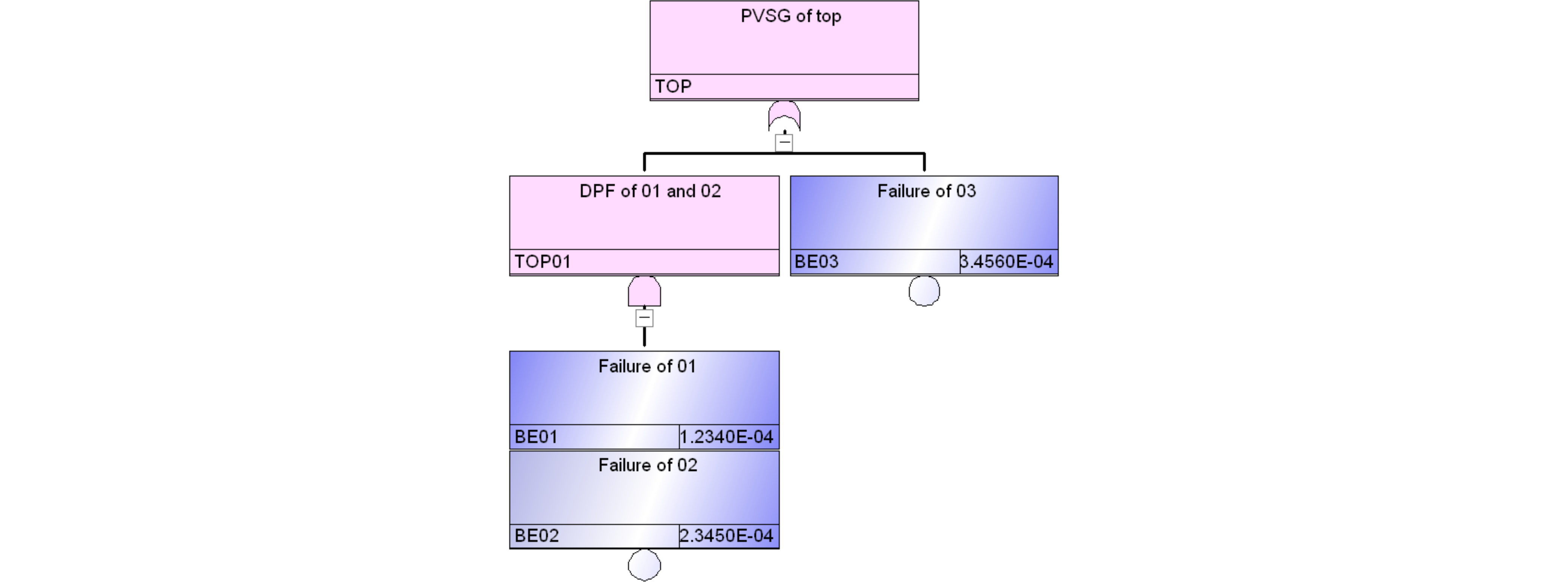 図215.2 ターゲットのFT
図215.2 ターゲットのFT
例えば、図215.2のFTをFlat File (ASCII File)で入力しようとすると、
- .BED --- Basic Eventの説明等の記述
- .BEI --- Basic Eventの情報、故障率やミッション時間等
- .FTD --- Fault Treeの説明等の記述
- .FTL --- 木の構造
- .GTD --- Top Event、中間ゲートの説明等の記述
の5種が少なくとも必要なようです。図215.3~215.7の構文ファイルを用意し、そのリストを図215.8のMARDファイルとしてMARDをloadすると、図215.2のFTが生成されました。
図215.3のBEDは基事象の定義で、3種類の基事象の名前と説明を記述します。
TEST =
* Name , Descriptions , Project
BE01 , Failure of 01 , TEST
BE02 , Failure of 02 , TEST
BE03 , Failure of 03 , TEST
図215.3 ターゲットFT用BED
図215.4のBEIは基事象の故障モデル、故障率、ミッション時間を記述します。赤字は故障率、青字はミッション時間です。
TEST =
* Name ,FdT,UdC ,UdT, UdValue, Prob, Lambda, Tau, Mission, Init,PF, UdValue2, Calc. Prob, Freq, Analysis Type , Phase Type , Project
BE01 , 3, , , , , 1.234E-009, , 1.000E+005, , , , , , , ,
BE02 , 3, , , , , 2.345E-009, , 1.000E+005, , , , , , , ,
BE03 , 3, , , , , 3.457E-009, , 1.000E+005, , , , , , , ,
図215.4 ターゲットFT用BEI
ここで、図215.4中のFdtは、表215.1(一部のみ)により規定される故障計算タイプです。
表215.1
| 故障計算タイプ記号 |
故障計算タイプ説明 |
| V |
数値事象 |
| 1 |
確率 |
| 3 |
指数分布($1-e^{^-\lambda t}$) |
図215.5にFT全体の定義として、FTDとして名前と説明を記述します。
TEST=
* Name , Description, Project
TOP ,PVSG of top , ,TEST
図215.5 ターゲットFT用FTD
図215.6にFTの木構造であるFTLを記述します。これは図215.1に文法が書かれています。
TEST, TOP =
TOP OR TOP01 BE03
TOP01 AND BE01 BE02
図215.6 ターゲットFT用FTL
図215.7のGTDにゲートの名前と説明を記述します。
TEST=
* Name , Description, Project
TOP ,PVSG of top , ,TEST
TOP01 , DPF of 01 and 02 , ,TEST
図215.7 ターゲットFT用GTD
上述のように、TESTフォルダのSubsフォルダに、各種ファイルをまとめ、一括ロードするためのリストです。
TEST_Subs\TEST.BED
TEST_Subs\TEST.BEI
TEST_Subs\TEST.FTL
TEST_Subs\TEST.FTD
TEST_Subs\TEST.GTD
図215.8 ターゲットFT用MARD
ここで調査している理由は、SAPHIRE等のFTA toolによりPMHFを正しく計算させたいためです。FTA toolによりPMHFを正しく計算させる手法には2種類あります。
- モデルがPMHF計算に対応 ------------ モデルがPMHF計算に対応していれば、パラメータを入力するだけで、モデルがPMHF式を正しく計算します。
- モデルがPMHF計算に非対応 ------------ しかしながら、一般的にはモデルがPMHF計算に対応していないため、ユーザがPMHF式に沿うようにFTを組み上げる必要があります。プログラムでFTのサブツリーが自動生成できれば、その労力が大幅に軽減されます。
 前のブログ
次のブログ
前のブログ
次のブログ