|
25 |
不稼働度$Q(t)$について (4) |
3. 稼働度の定義からの導出
ついでに既出ですが、リペアラブルエレメントの不稼働度$Q(t)$の数式的な求め方を示します。基本的にはブログ記事に示す導出方法です。
$$ Q_\text{SM}(t):=\Pr\{\text{(repairable)SM down at }t\}=1-A_\text{SM}(t)\tag{350.1} $$ 一方、稼働度は、 $$ A_\text{SM}(t):=\Pr\{\text{(repairable)SM up at }t\}\\ =R(t)+\int_0^t m(x)R(t-x)dx\tag{350.2} $$ ここで、$A(t)$は時刻tにおけるポイントアベイラビリティ、$R(t)$は時刻tにおけるリライアビリティ(信頼度)、$m(t)$は時刻tにおけるリニューアル密度(修理密度)です。
規格に従えば、修理周期は教科書一般にあるように指数関数分布はとらず、定期的に$\tau$毎に行われるため、稼働度として(350.2)は(350.3)と表せます。ここで、$i$は$i$番目の定期検査・修理を意味し、時刻$t$までに$n$回の定期検査・修理が行われるものとします。 $$ A_\text{SM}(t)=R_\text{SM}(t)+K_\text{SM,MPF}F_\text{SM}(\tau)\sum_{i=1}^n R_\text{SM}(t-i\tau)\tag{350.3} $$ ここで、$K_\text{SM,FMC,MPF}$は少々長いので、$K_\text{SM,MPF}$と省略しました。PMHFの議論中のKはFMC(Failure Mode Coverage)に決まっているためです。
修理分$K_\text{SM,MPF}F_\text{SM}(\tau)$が時刻$t$の関数でないのは、検出能力$K_\text{MPF}$は一定で、かつ毎回の故障確率も一定で、検出した分は全て修理されるため、修理分が一定となるためです。(350.3)式の総和を展開すれば、 $$ \require{cancel} A_\text{SM}(t)=R_\text{SM}(t)+K_\text{SM,MPF}\left[1-R_\text{SM}(\tau)\right]\cdot\\ \left[R_\text{SM}(t-\tau)+R_\text{SM}(t-2\tau)+...+R_\text{SM}(t-(n-1)\tau)\right]\\ =R_\text{SM}(t)+K_\text{SM,MPF}\left[\bcancel{R_\text{SM}(t-\tau)}-R_\text{SM}(t)\\ +\bcancel{R_\text{SM}(t-2\tau)}-\bcancel{R_\text{SM}(t-\tau)}\\ ...\\ +R_\text{SM}(t-n\tau)-\bcancel{R_\text{SM}(t-(n-1)\tau)}\right]\\ =R_\text{SM}(t)+K_\text{SM,MPF}\left[-R_\text{SM}(t)+R_\text{SM}(t-n\tau)\right] \tag{350.4} $$ ここで、$u:=t-n\tau$とパラメータ$u$を定義し、(350.1)に(350.4)を代入すれば、 $$ Q_\text{SM}(t)=1-A_\text{SM}(t)=F_\text{SM}(t)-K_\text{SM,MPF}\left[F_\text{SM}(t)\bcancel{-1}+\bcancel{1}-F_\text{SM}(u)\right]\\ =\img[-1.35em]{/images/withinseminar.png} \tag{350.5} $$ 以上から、(348.1)、(349.3)、(350.5)で示されたように、導出手法は異なっても同一のPUA方程式が導出されることがわかります。
このリペアラブルエレメントの不稼働度$Q(t)$(350.5)及び、それを時間微分した不稼働密度$q(t)$の方程式(350.6)は、PMHF方程式の導出の根幹です。
$$ q_\text{SM}(t)=\frac{dQ_\text{SM}(t)}{dt}=(1-K_\text{SM,MPF})\frac{dF_\text{SM}(t)}{dt}+K_\text{SM,MPF}\frac{dF_\text{SM}(u)}{du}\frac{du}{dt}\\ =\img[-1.35em]{/images/withinseminar.png} \tag{350.6} $$
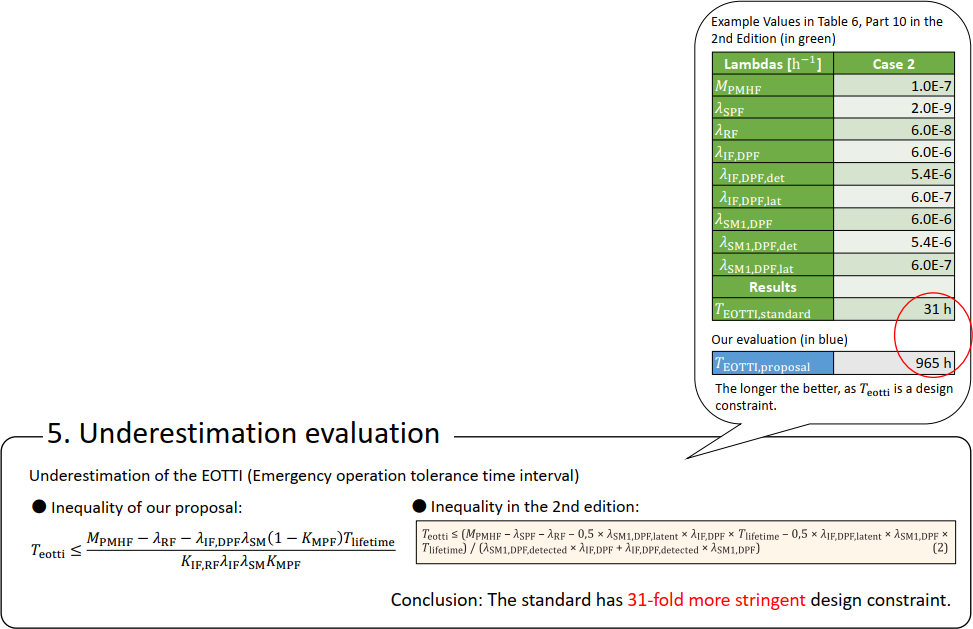
なお、本稿はRAMS 2025に投稿予定のため一部を秘匿しています。