|
26 |
アーキテクチャメトリクスの分割 |
SPFMの分割
Part5 8.4.7にSPFMの分割例が新設されました。例えばアイテムがレメントA, B, Cから構成され、 $$ \lambda_{\mathrm{total}}=\lambda_{\mathrm{A}}+\lambda_{\mathrm{B}}+\lambda_{\mathrm{C}} $$ であり、それぞれのエレメントA, B, Cに対するSPFMの目標値を、$M_{\mathrm{SPFM,A}}$, $M_{\mathrm{SPFM,B}}$, $M_{\mathrm{SPFM,C}}$とするとき、 $$ \left[\frac{\lambda_{\mathrm{A}}}{\lambda_{\mathrm{total}}}M_{\mathrm{SPFM,A}}+ \frac{\lambda_{\mathrm{B}}}{\lambda_{\mathrm{total}}}M_{\mathrm{SPFM,B}}+ \frac{\lambda_{\mathrm{C}}}{\lambda_{\mathrm{total}}}M_{\mathrm{SPFM,C}}\right]\ge M_{\mathrm{SPFM,Itemtarget}}\tag{118.1} $$ となるような任意の$M_{\mathrm{SPFM,A}}$, $M_{\mathrm{SPFM,B}}$, $M_{\mathrm{SPFM,C}}$の目標値を許容する、とあります。これは、例えばASIL-Dであれば、$M_{\mathrm{SPFM,Itemtarget}}\ge99\%$であるとき、A, B, Cそれぞれのエレメントが99%以上無い場合でも、故障率の比(故障率密度が一定であれば面積比)により重みづけされたSPFMを計算し、結果が目標を満足していれば良いという意味です。
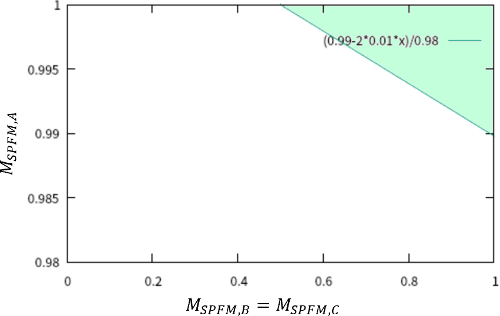
具体例で見てみます。故障率比率がそれぞれ $$ \frac{\lambda_{\mathrm{A}}}{\lambda_{\mathrm{total}}}=98\%, \frac{\lambda_{\mathrm{B}}}{\lambda_{\mathrm{total}}}=1\%, \frac{\lambda_{\mathrm{C}}}{\lambda_{\mathrm{total}}}=1\% $$ であるとき、(118.1)を満たす$M_{\mathrm{SPFM,A}}$, $M_{\mathrm{SPFM,B}}$, $M_{\mathrm{SPFM,C}}$の組み合わせはいろいろ考えられますが、例えば故障率比率の大きなエレメントAのSPFMが比較的大きい場合を考え、例えば以下のようであるとすれば、 $$ M_{\mathrm{SPFM,A}}=99.9\%, M_{\mathrm{SPFM,B}}=60.0\%, M_{\mathrm{SPFM,C}}=60.0\% $$ である場合、(118.1)左辺は、 $$ (118.1)=\img[-1.35em]{/images/withinseminar.png} $$ となり、アイテムターゲットのSPFMである99%以上を満足します。
別の値の例としては、 $$ M_{\mathrm{SPFM,A}}=99.99\%, M_{\mathrm{SPFM,B}}=51.0\%, M_{\mathrm{SPFM,C}}=51.0\% $$ である場合、(118.1)左辺は、 $$ (118.1)=\img[-1.35em]{/images/withinseminar.png} $$ となり、アイテムターゲットのSPFMである99%以上を満足します。
このような組み合わせは無数にありますが、上記のように$M_{\mathrm{SPFM,B}}=M_{\mathrm{SPFM,C}}$でありこれを横軸として、縦軸を$M_{\mathrm{SPFM,A}}$とすれば、解の領域は図118.1のグリーンの領域となります。
同様にPart5 8.4.8に、LFMについても分割例が記述されました。それぞれのエレメントA, B, Cに対するLFMの目標値を、$M_{\mathrm{LFM,A}}$, $M_{\mathrm{LFM,B}}$, $M_{\mathrm{LFM,C}}$とするとき、 $$ \left[\frac{\lambda_{\mathrm{A}}}{\lambda_{\mathrm{total}}}M_{\mathrm{LFM,A}}+ \frac{\lambda_{\mathrm{B}}}{\lambda_{\mathrm{total}}}M_{\mathrm{LFM,B}}+ \frac{\lambda_{\mathrm{C}}}{\lambda_{\mathrm{total}}}M_{\mathrm{LFM,C}}\right]\ge M_{\mathrm{LFM,Itemtarget}}\tag{118.2} $$ となるような任意の$M_{\mathrm{LFM,A}}$, $M_{\mathrm{LFM,B}}$, $M_{\mathrm{LFM,C}}$の目標値を許容する、とあります。
$M_\mathrm{LFM}$の解空間は$M_\mathrm{SPFM}$と同様に導出することができます。