別の論文
"Functional Safety BMS Design Methodology for Automotive Lithium-Based Batteries"において、PMHF式が記載されています。この論文は他と異なりDPFが考慮されています。現在までに弊社の論文を除き、PMHF式でDPF項まで考慮されているものはほとんど発見されていません。
この論文の当該部分を図524.1に示します。
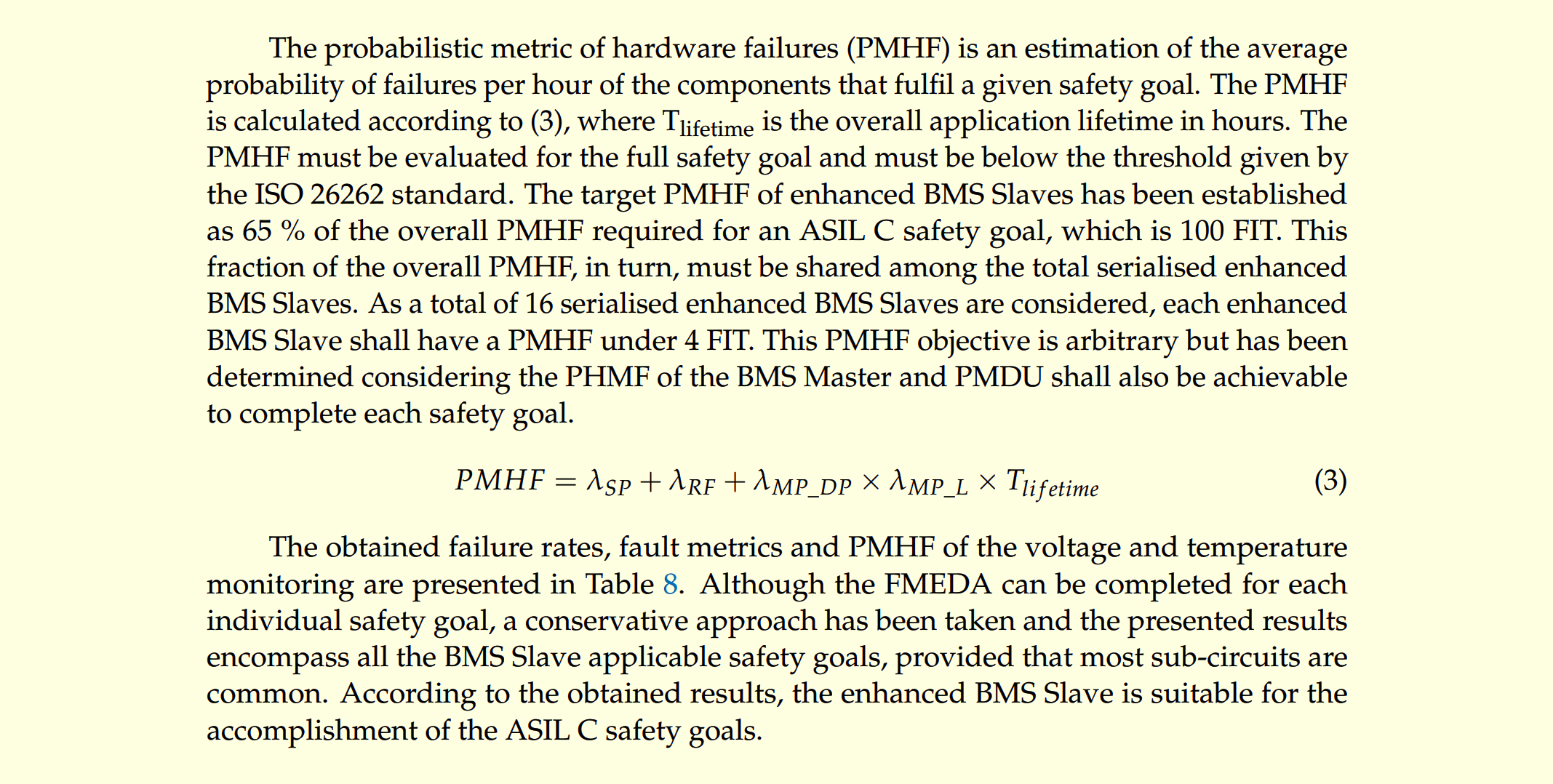 図524.1 論文のPMHF式
図524.1 論文のPMHF式
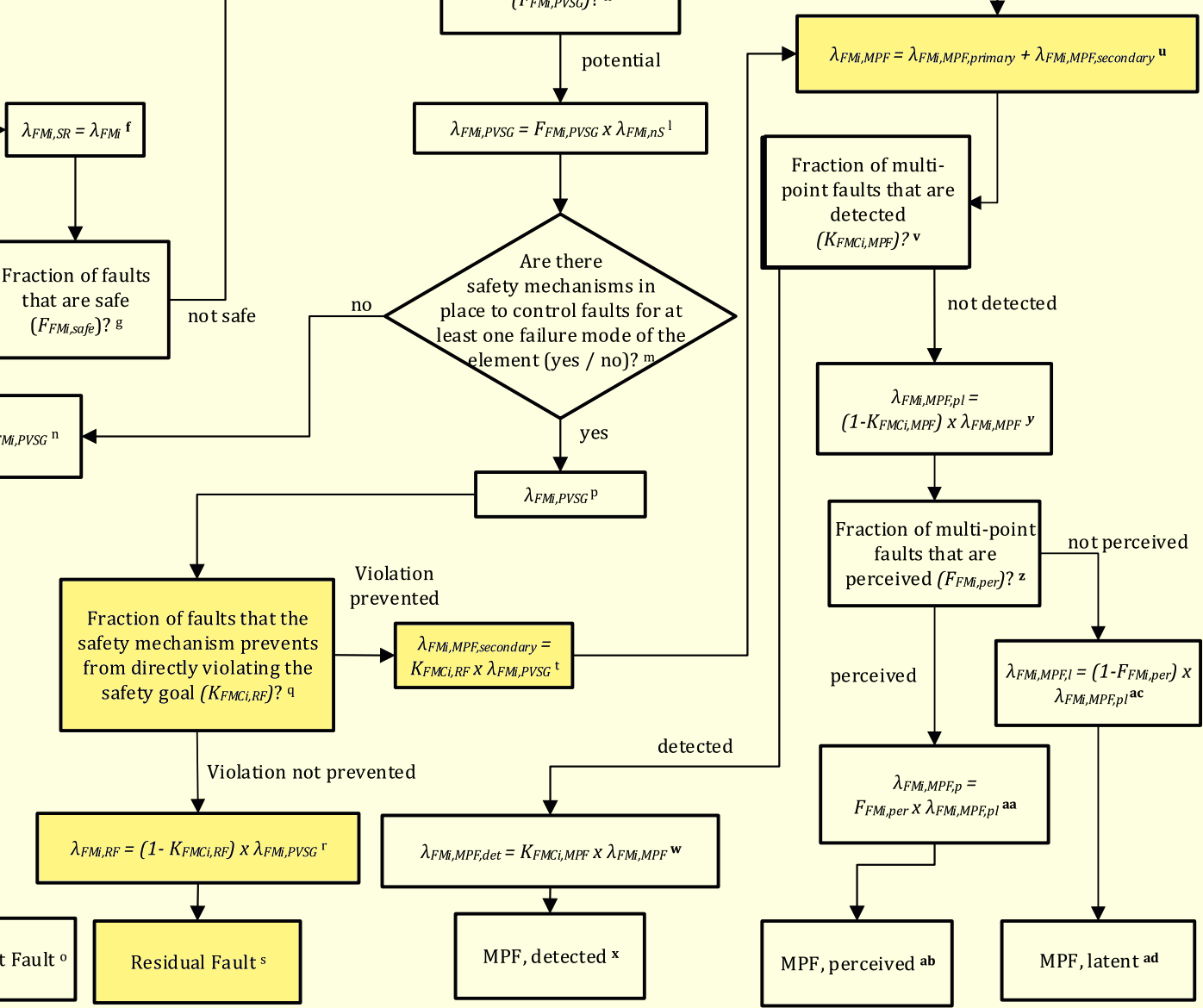
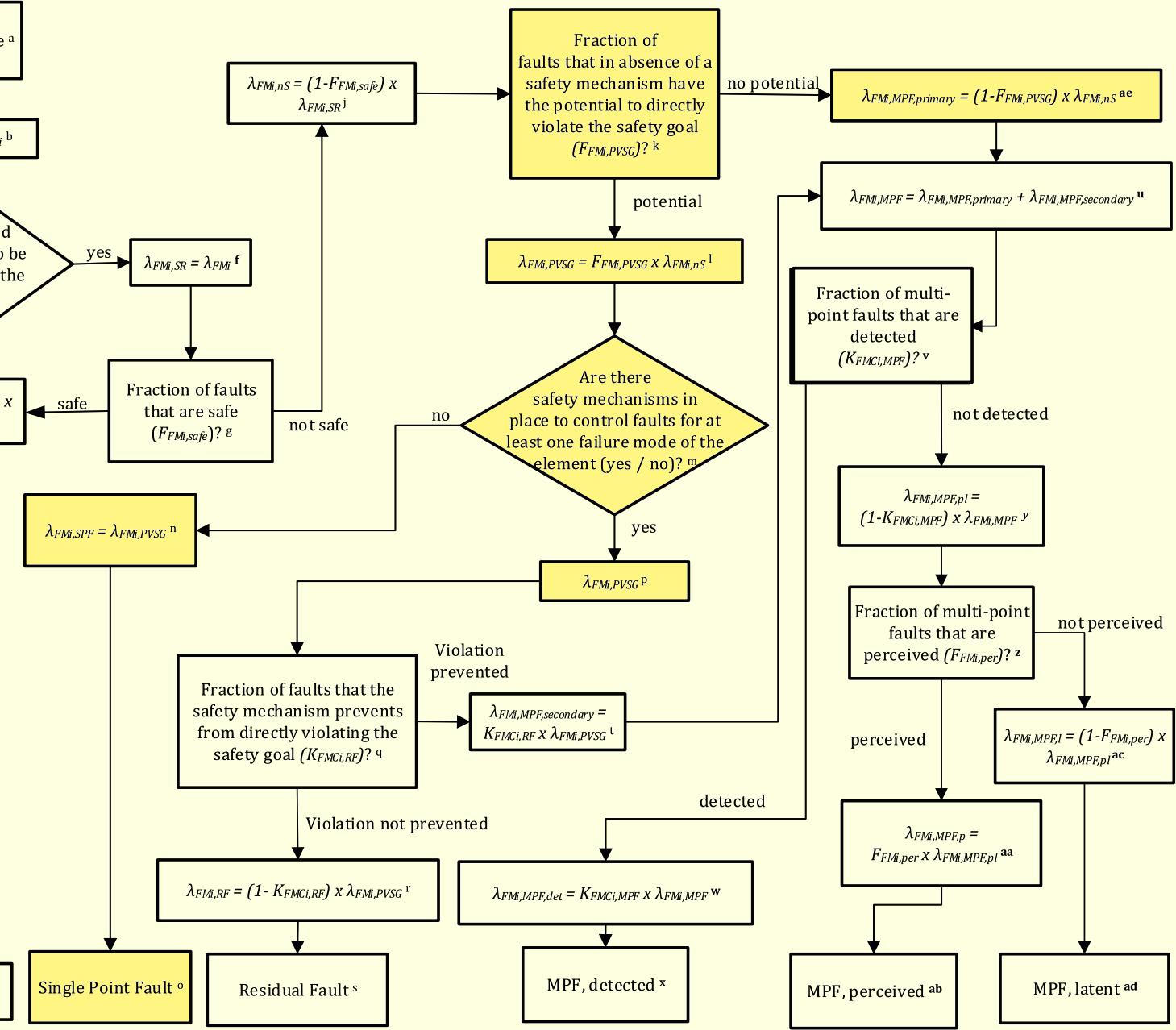
式の前後の文には式の出典等は書かれておらず、いきなり(3)が現れます。問題は$\lambda_\text{MP_DP}$と$\lambda_\text{MP_L}$が何を意味するかです。論文には故障分類フローが書かれており、それにより正しく$\lambda_\text{MP_DP}$と$\lambda_\text{MP_L}$を分類していました。
弊社提案式は過去記事でまとめましたが、非冗長系に関して
$$
M_\text{PMHF,NRD}={(1-K_\text{IF,RF})\lambda_\text{IF}+2K_{\text{IF,RF}}\alpha}\\
=(1-K_\text{IF,RF})\lambda_\text{IF}+K_{\text{IF,RF}}\lambda_{\mathrm{IF}}\lambda_{\mathrm{SM}}[(1-K_{\mathrm{SM,MPF}})T_\text{lifetime}+K_{\mathrm{SM,MPF}}\tau]
\tag{524.1}
$$
ここで、$T_\text{lifetime}$に関する項と$\tau$に関する項があり、それぞれレイテントフォールトのリスク、ディテクテッドフォールトのリスクです。後者は定期修理期間$\tau$以内のリスクしかないのでその項を無視すれば、
$$
(524.1)\approx(1-K_\text{IF,RF})\lambda_\text{IF}+K_\text{IF,RF}\lambda_\text{IF}\lambda_\text{SM}(1-K_\text{SM,MPF})T_\text{lifetime}\\
=\lambda_\text{SPF/RF}+\lambda_\text{IF,DPF}\lambda_\text{SM,DPF,lat}T_\text{lifetime}
\tag{524.2}
$$
となります。論文の故障率が、
$$
\lambda_\text{MPF_DP}=\lambda_\text{IF,DPF,det}+\lambda_\text{SM,DPF,det}=\sum\lambda_\text{DPF,det}\\
\lambda_\text{MPF_L}=\lambda_\text{IF,DPF,lat}+\lambda_\text{SM,DPF,lat}=\sum\lambda_\text{DPF,lat}
$$
なので、若干不正確ではありますが、まあまあ良いPMHF式だと思われます。DPFの評価は本来、レイテントとなるSMのフォールトにIFのフォールトが起きる2重故障なので、IFとSMは対応する必要があります。この分析にはFTAを用いてMCSを導出することで最小の組み合わせを得ることができます。
しかしながら、本論文ではFMEDAを用いて計算すると書かれているため、積をとってから$\sum$を計算するのではなく$\sum$の後積をとっていますが、DPF項は比較的小さいためこれでも問題ないと考えます。
安全目標や安全要求の分析、FMEDAによるSPFM/LFM/PMHFの導出等、誤りなく記述されていて参考になる論文だと思いますが、唯一の欠点は出版社がMDPIだというところです。
 前のブログ
次のブログ
前のブログ
次のブログ