|
12 |
AI Writer |
キーワードを入れると記事を書いてくれる(ChatGPTを活用した)AI Writerというサイトがあるとのことで、利用してみました。
https://ai-writer.userlocal.jp/
まず、記事を書きたいキーワードを入力します。
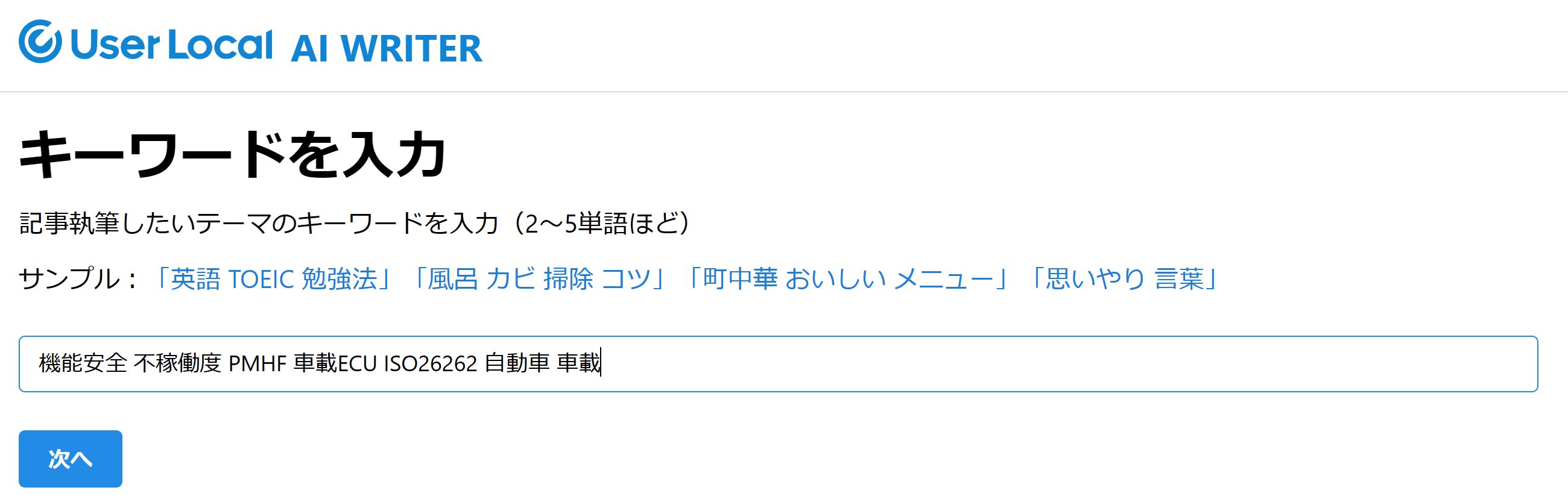
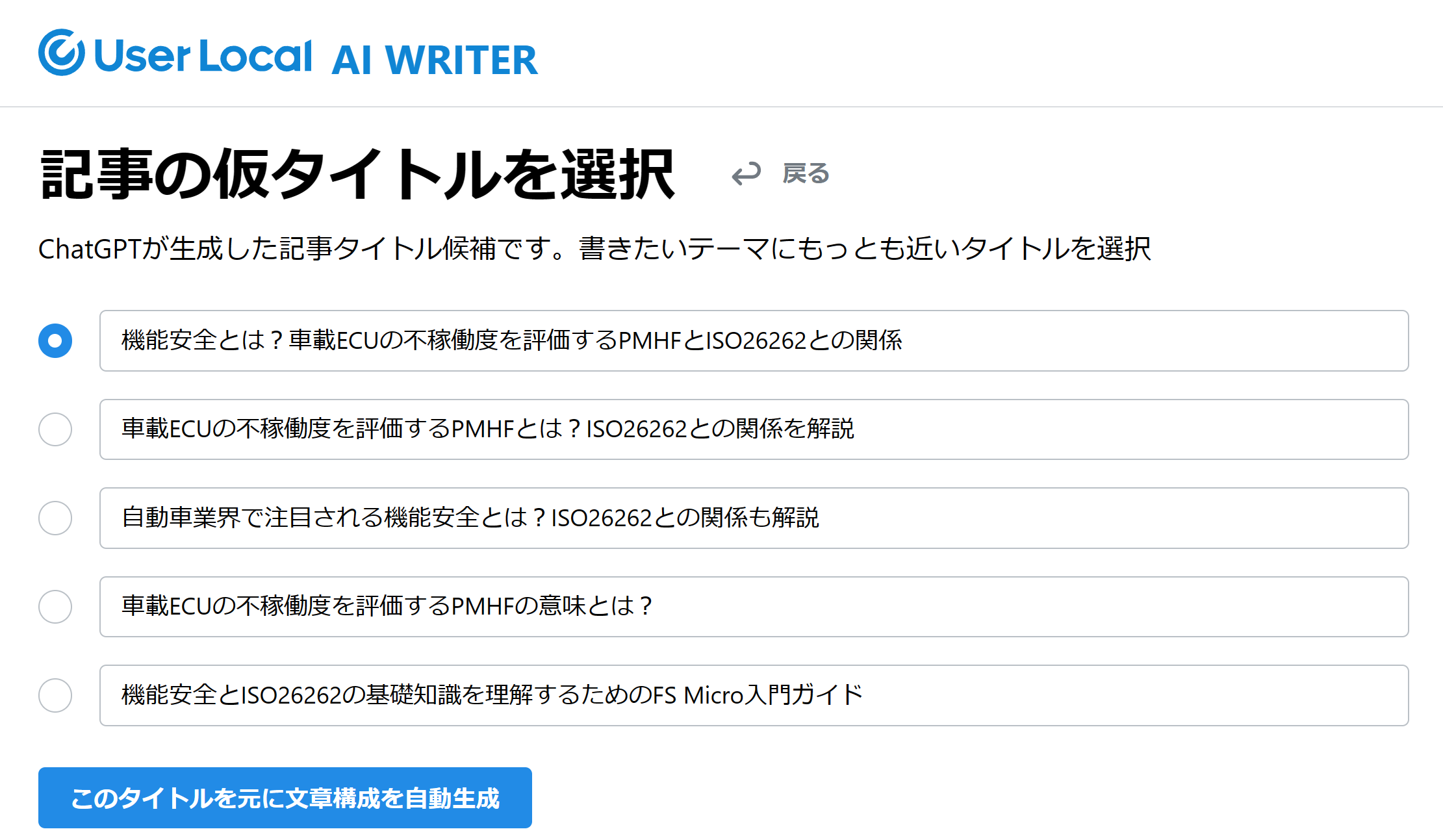
すると、キーワードを膨らませてくれるので、適宜必要なキーワードを3~10個選択します。

これらのキーワードから記事のタイトルを考えてくれます。
|
12 |
AI Writer |
キーワードを入れると記事を書いてくれる(ChatGPTを活用した)AI Writerというサイトがあるとのことで、利用してみました。
https://ai-writer.userlocal.jp/
まず、記事を書きたいキーワードを入力します。
すると、キーワードを膨らませてくれるので、適宜必要なキーワードを3~10個選択します。
これらのキーワードから記事のタイトルを考えてくれます。
|
11 |
2nd SMは故障しないことの証明 (2) |
2nd SMは故障しないことを証明してください。ISO 26262において、VSGに必要なのは2つまでのフォールトであるということを用います。確率論によれば故障は同時に起きないので、IF, 1st SM、2nd SMの3つのエレメントのうち、2つが引き続いて故障する場合を考えます。すると順番が重要であるため、その場合の数は2 * 3C2となります。すべての場合を考えて2nd SMの故障がVSG=DPFに関わるかを考えてください。
ChatGPT:
了解しました。まず、3つのエレメントから2つを選ぶ異なる組み合わせの数は$_3C_2$であり、順序が重要であるためその2倍となります。したがって、評価する状態の総数は
$$ 2 \cdot _3C_2 = 2 \cdot \frac{3!}{2!(3-2)!} = 2 \cdot 3 = 6 $$
となります。それでは、各シナリオを評価しましょう:
IF → 1st SM 故障
ここではIFが最初に故障し、その後1st SMが故障します。このシナリオでは、2nd SMがその後故障するかどうかは関係ありません、なぜならVSGはすでに発生しているからです。
1st SM → IF 故障
ここでも、1st SMが最初に故障し、その後IFが故障します。このシナリオでは、2nd SMがその後故障するかどうかは関係ありません、なぜならVSGはすでに発生しているからです。
IF → 2nd SM 故障
IFが最初に故障し、その後2nd SMが故障します。このシナリオでは1st SMがまだ機能しているため、VSGは発生しません。
2nd SM → IF 故障
2nd SMが最初に故障し、その後IFが故障します。このシナリオでは1st SMがまだ機能しているため、VSGは発生しません。
1st SM → 2nd SM 故障
1st SMが最初に故障し、その後2nd SMが故障します。このシナリオではIFがまだ機能しているため、VSGは発生しません。
2nd SM → 1st SM 故障
2nd SMが最初に故障し、その後1st SMが故障します。このシナリオではIFがまだ機能しているため、VSGは発生しません。
これから分かるように、シナリオ3, 4, 5, 6では2nd SMの故障がVSGに影響を与えません。シナリオ1と2ではVSGが発生していますが、これは2nd SMの故障前に発生しており、2nd SMの故障自体はVSGに影響を与えません。
したがって、どのシナリオにおいても2nd SMの故障はVSG=DPFに影響を与えないことが確認でき、2nd SMが故障しないと言えます。
|
8 |
2nd SMは故障しないことの証明 |
過去記事#621において、「ISO 26262の範疇では2nd SMは故障しない」ことを証明させました。
ChatGPT:
2nd SMが故障しないことを証明するためには、システムが危険な状態(VSG)になるためには、通常、2つの故障が必要であるという事実を利用します。つまり、1st SMが故障し(これが1つ目の故障)、その後にIFが故障する(これが2つ目の故障)というシナリオを考えます。 このシナリオでは、2nd SMが故障するという3つ目の故障は考慮されません。したがって、2nd SMが故障しないという前提は、ISO 26262の範囲内で合理的であると言えます。
単に「1st SMの故障⇒IFの故障」の一例だけの説明であり、全ての場合をつくしていないことから証明したとは言えません。そのため、2nd SMは故障しないことを全ての場合で証明させます。
ISO 26262において、IF(Intended functionality), 1st SM, 2nd SMの役割をそれぞれ説明してください。
ChatGPT:
ISO 26262標準に従った自動車の安全に関連するシステムの設計において、IF(Intended Functionality)、1st SM(First Safety Mechanism)、および2nd SM(Second Safety Mechanism)は以下のような役割を果たします。
IF (Intended Functionality)
IFはシステムが期待通りに動作することを保証する主要な機能を指します。これは通常の運用状況下でシステムが適切に機能することを保証する役割を担います。目的は、システムが定められた要件を満たし、安全目標を達成することです。
1st Safety Mechanism (1st SM)
1st SMは、IFがVSG (Violation of a Safety Goal) を引き起こすのを防ぐための保護メカニズムです。IFの故障が発生した場合、1st SMはその故障を検出し、システムを安全な状態に移行させるか、故障の影響を緩和します。
2nd Safety Mechanism (2nd SM)
2nd SMは1st SMが潜在的な故障(Latent Fault, LF)を発生させるのを防ぐための追加の保護メカニズムです。このメカニズムは1st SMの故障を緩和する役割を果たし、1st SMが故障した場合でもシステムを安全な状態に保つことができます。しかし、2nd SM自体はVSGを直接防止する役割は果たしていません。
これらのメカニズムはシステムの安全性を保証するために連携して機能し、それぞれが異なるレベルの保護を提供します。このようなアプローチにより、システムは多くの異なる故障シナリオで安全を保つことが可能となります。
|
6 |
修理形式と$Q(t)$のまとめ |
以下は過去記事#347に掲載した図です。

ISO 26262の前提は定期検査・修理です。具体的には検査周期を$\tau$として、時刻$\tau_i=i\tau (i=1, 2, ..., n, n=\lfloor\frac{t}{\tau}\rfloor)$において検査・修理が行われます。
過去記事で分析したように、稼働度$A_\text{SM}(t)$の修理を含めた式に従えば、SMの不稼働度$Q_\text{SM}(t)$は、修理密度を$m(x)$として、(658.1)となります。 $$ \require{color} \definecolor{pink}{rgb}{1.0,0.8,1.0} \begin{eqnarray} Q_\text{SM}(t)&=&F_\text{SM}(t)-\int_0^t m(x)\colorbox{pink}{$R_\text{SM}(t-x)$}dx\\ &=&F_\text{SM}(t)-KF_\text{SM}(\tau)\sum_{i=1}^n R_\text{SM}(t-i\tau)\\ &=&F_\text{SM}(t)-K(1-R_\text{SM}(\tau))\sum_{i=1}^n R_\text{SM}(t-i\tau)\\ &=&F_\text{SM}(t)-K\sum_{i=1}^n R_\text{SM}(t-i\tau)+K\sum_{i=1}^n R_\text{SM}(t-(i-1)\tau)\\ &=&F_\text{SM}(t)-KR_\text{SM}(t-n\tau)+KR_\text{SM}(t)\\ &=&\img[-1.35em]{/images/withinseminar.png} \end{eqnarray} \tag{658.1} $$
ただし、$K$は各検査におけるフォールト検出率、$u:=t-n\tau$です。
(658.1)のピンクで示したように、例えば区間$[(i-1)i\tau, i\tau)$においてフォールトが発生し、その区間末で修理された場合、その後$t$までフォールトしないという前提の式となっています。これは、その後の区間$[(j-1)i\tau, j\tau), i<j$において再度フォールトする場合を含めると、次にその区間$[(j-1)i\tau, j\tau)$でのフォールトを考える場合にダブルカウントになるためです。
ここで(658.1)を書き直し以下の式を考えます。 $$ Q_\text{SM}(t)=F_\text{SM}(t)-K_\text{SM,MPF}\left[F_\text{SM}(t)-F_\text{SM}(u)\right] \tag{658.2} $$ 不稼働度は基本的には不信頼度から$t$までに検出(=修理)された分、すなわち$K_\text{SM,MPF}$がかかる項を引きます。さらに修理分のうち、$u:=t-n\tau$の期間のフォールトを引き戻し、その部分は修理されないことを表しています。
一方、本来は定期検査・修理が原則なのですが、1回修理としての考え方は、次の事実を利用します。
最近の検査時刻による修理:
・ 検出可能フォールトの場合、$\tau_n$での検査時には、それまでの故障(もしあれば)が検出・修理されます。したがって、$\tau_n$以前の検査時刻での故障の有無は、時刻$t$における不稼働度に影響しません。
・ 検出不可フォールトの場合、修理は行われないため、修理回数は不稼働度に影響しません。
次回検査までの期間: 時刻$t$における不稼働度を考える際、$\tau_n$以降、次回の検査$\tau_{n+1}$までの期間に生じる故障が関連します。この期間内での故障の有無、および$\tau_n$での検出の可否が、時刻$t$における不稼働度に影響します。
従って、細々と修理するのとまとめて一遍に修理するのでは効果が同じです。不稼働度の求め方は2種類考案したので、それらを以下に示します。
過去記事で分析したように、検査の可否により、事象を分類します。
これにより(658.3)が得られます。
$$ \begin{eqnarray} Q_\text{SM}(t)&=& \Pr\{ (\text{fault detected at }\tau_n\ \cap\ \text{SM receives a fault in }(\tau_n, t]) \ \cup\\ &&\ \ \ \ (\overline{\text{fault detected at }\tau_n} \cap \text{SM receives a fault in }(0, t]) \}\\ &=&\img[-1.35em]{/images/withinseminar.png} \end{eqnarray} \tag{658.3} $$
過去記事で分析したように、$\tau_n$での検出可否、$\tau_n$前と$\tau_n$後のフォールト生起有無の8通りの組み合わせを全て数え上げ、不稼働になる条件を洗い出します。
これにより(658.4)が得られます。
$$ \begin{eqnarray} Q_\text{SM}(t)&=&\Pr\{(\text{fault detected at }\tau_n\ \cap\\ &&\ \ \ \ [\text{SM receives a fault in }(0, \tau_n]\cap\ \text{SM receives a fault in }(\tau_n, t]\ \cup\\ &&\ \ \ \ \overline{\text{SM receives a fault in }(0, \tau_n]}\cap\ \text{SM receives a fault in }(\tau_n, t]])\ \cup\\ &&(\overline{\text{fault detected at }\tau_n} \cap \\ &&\ \ \ \ [\text{SM receives a fault in }(0, \tau_n]\cap\ \text{SM receives a fault in }(\tau_n, t]\ \cup\\ &&\ \ \ \ \overline{\text{SM receives a fault in }(0, \tau_n]}\cap\ \text{SM receives a fault in }(\tau_n, t]\ \cup\\ &&\ \ \ \ \text{SM receives a fault in }(0, \tau_n]\cap\ \overline{\text{SM receives a fault in }(\tau_n, t]}])\}\\ &=&\img[-1.35em]{/images/withinseminar.png} \end{eqnarray} \tag{658.4} $$
規格第2版ではPMHF式を導出する際に、2nd SMがドライバーへの通知可否により場合分けを行っています。ところがこの不稼働度は$\img[-0.9em]{/images/withinseminar.png}$
なお、本稿はRAMS 2025に投稿予定のため一部を秘匿しています。
|
5 |
$Q(t)$とChatGPT (26) |
人間:
間違いです。$F_\text{SM}(\tau_n)$は時刻$\tau_n$での修理によりゼロになります。ところがそれを代入すると、不稼働度は$F_\text{SM}(t)-0=F_\text{SM}(t)$となり、これは$\Pr\{\text{SM receives a fault in }(0,t)\}$となり不合理。本来は$\Pr\{\text{SM receives a fault in }(\tau_n,t)\}$となるはず。この矛盾を解消してください。
ChatGPT: (中略)
申し訳ありません、以前の説明で矛盾の解消に至らなかったことに気づきました。再度考察し、不稼働度を正しく表現しましょう。
検出不可の場合と検出可の場合を組み合わせて不稼働度を考える際、以下の確率を組み合わせる必要があります。
ここで、検出可の場合において、$ \tau_n $での故障は瞬時に修理されるため、$ F_{\text{SM}}(\tau_n) = 0 $ です。さらに、この時点での不信頼度がリセットされるため、$ \tau_n $から$ t $までの故障生起確率が重要となります。
この確率を表現するために、$ u = t - \tau_n $ と定義されていることを利用し、次のように表現します。
したがって、不稼働度 $ Q_{\text{SM}}(t) $ は以下のようになります。
$$ Q_{\text{SM}}(t) =\img[-1.35em]{/images/withinseminar.png} $$
この式では、検出不可の場合と検出可の場合を適切に組み合わせ、不稼働度を正しく表現しています。検出可の場合において、$ \tau_n $での故障が瞬時に修理されること、およびその時点での不信頼度がリセットされることを反映しています。
今回は正解を与えずに矛盾を指摘して解消させましたが、うまく正解を導出できました。
なお、本稿はRAMS 2025に投稿予定のため一部を秘匿しています。
|
4 |
$Q(t)$とChatGPT (25) |
人間:
$\tau_n$での検出可の確率を$\Pr\{\text{fault detected at }\tau_n\}=K (const.)$ 検出不可の確率を$\Pr\{\text{fault not detected at }\tau_n\}$、 時刻aからbまでにSMにフォールトが起きる確率を$\Pr\{\text{SM receives a fault in }(a, b]\}$ と表記してください。
ChatGPT: (中略)
指定された表記に基づいて、各確率を以下のように定義します。
これらの確率を用いると、不稼働の条件を以下のように表現できます。
$$ \Pr\{\text{fault not detected at } \tau_n\} \cdot \Pr\{\text{SM receives a fault in } (0, t]\} $$
$$ K \cdot \Pr\{\text{SM receives a fault in } (\tau_n, t]\} $$
上記の式は、検出の可・不可に基づいて、SMが不稼働になる確率を表現しています。
人間:
指数分布するフォールト事象について、以下のことが知られています。 $$\Pr\{\text{fault detected at }\tau_n\}=K (const.)$$ $$\Pr\{\text{SM receives a fault in }(a, b]\}=\int_a^b f_\text{SM}(x)dx = F_\text{SM}(b)-F_\text{SM}(a)$$ ただし、$f_\text{SM}(t)$はPDF, $F_\text{SM}(t)$はCDF tにおける不稼働度$Q_\text{SM}(t)$を、SMの不信頼度$F_\text{SM}(t)$を用いて表現してください。$u:=t-\tau_n$として$\tau$及び$\tau_n$を消去したうえで$t, u$で表現してください。exponential表現は使用しないこと。
ChatGPT:
指定された条件に基づいて、$ t $における不稼働度 $ Q_{\text{SM}}(t) $ を計算し、$ \tau $ 及び $ \tau_n $ を消去して $ t, u $ で表現します。変数 $ u $ は $ u = t - \tau_n $ と定義されています。
まず、前述の不稼働確率をSMの不信頼度 $ F_{\text{SM}}(t) $ として表現するために、以下の式を考えます。
$$ \begin{eqnarray} \Pr\{\text{fault not detected at } \tau_n\} \cdot \Pr\{\text{SM receives a fault in } (0, t]\} &=& (1 - K) \cdot (1 - e^{-\lambda t}) \\ &=& (1 - K) \cdot F_{\text{SM}}(t) \end{eqnarray} $$
$$ \begin{eqnarray} K \cdot \Pr\{\text{SM receives a fault in } (\tau_n, t]\} &=& K \cdot (e^{-\lambda \tau_n} - e^{-\lambda t}) \\ &=& K \cdot (F_{\text{SM}}(\tau_n) - F_{\text{SM}}(t)) \end{eqnarray} $$
これらの式を合計すると、$ t $ における不稼働度 $ Q_{\text{SM}}(t) $ が得られます。
$$ \begin{eqnarray} Q_{\text{SM}}(t) &=& (1 - K) \cdot F_{\text{SM}}(t) + K \cdot (F_{\text{SM}}(\tau_n) - F_{\text{SM}}(t)) \\ &=& (1 - K) \cdot F_{\text{SM}}(t) + K \cdot F_{\text{SM}}(t - u) - K \cdot F_{\text{SM}}(t) \\ &=& F_{\text{SM}}(t) - K \cdot F_{\text{SM}}(t) + K \cdot F_{\text{SM}}(t - u) \end{eqnarray} $$
ここで、exponential表現を使用せず、$ \tau $ 及び $ \tau_n $ を消去して $ t, u $ で表現しました。この式が、指定された条件に基づく不稼働度の表現となります。
計算間違いがあるようです。さらに、単純に積分の式を当てはめても正解が出ません。
|
1 |
RAMS査読4回目 |
おそらく最終の査読結果が届きました。指摘は2点あり、
とのことです。Systematic Faultは規格用語で、一般にはバグのような欠陥を指します。その説明をイントロダクションに追加し、さらにメジャーSystematic Faultの記述を図も含めて追加しました。そのため効果測定に関するEOTTIの部分を全て削除しました。英文校正を経て投稿済みです。
| 期限 | マイルストーン | 状態 |
|---|---|---|
| 2023/4/30 | アブストラクト投稿締め切り(システム入力) | 投稿済 |
| 2023/6/10⇒2023/5/25 | アブストラクト採択結果 | 採択済 |
| 2023/8/1 | 論文、プレゼン投稿締め切り(名前、所属無し版) | 投稿済 |
| 2023/9/1 | 第1回論文、プレゼン資料査読コメント受領 | 投稿済 |
| 2023/10/10⇒2023/9/17 | 改訂版論文、プレゼン投稿締め切り(名前、所属有り版) | 投稿済 |
| 2023/10/22 | 最終査読コメント受領 | |
| 2023/10/10 | 学会出席登録締め切り | |
| 2023/10/10 | 最終論文、プレゼン投稿締め切り(名前、所属有り版) |
