さて、RAMS 2022にRAMS 2020で発表したPMHF式を修正した式を投稿し採択されましたが、ここで両方の式をまとめておきます。便宜上RAMS 2022の式はより広い範囲をカバーするため、RAMS 2022の式から先に説明します。
RAMS 2022
RAMS 2022では、後述のRAMS 2020の式を拡張しました。具体的にはISPCE 2017で筆者が導入した$K_\text{IF,det}$を再び導入したものです。$K_\text{IF,det}$の意味は、1st SMのIFに対する機能であるVSG抑止能力に対する検出能力の比であり、以下のように条件付き確率で表される係数です。
$$
K_\text{IF,det}=\Pr\{\text{IF detected}\ |\ \text{IF prevented}\}
$$
しかしながらこの条件付き確率はSMのアーキテクチャにより一意に決定され、
$$
K_\text{IF,det}=
\begin{cases}
\begin{eqnarray}
&0&\ \ \text{if subsystem is redundant}\\
&1&\ \ \text{if subsystem is nonredundant}
\end{eqnarray}
\end{cases}
$$
のように2値をとります。
この$K_\text{IF,det}$及び、$K_\text{IF,RF}$, $K_\text{IF,MPF}$を加えたIFに関するKパラメータ及び、$K_\text{SM,MPF}$のSMに関するKパラメータによりフォールトを分類し、以前示した表368.1を導出しています。
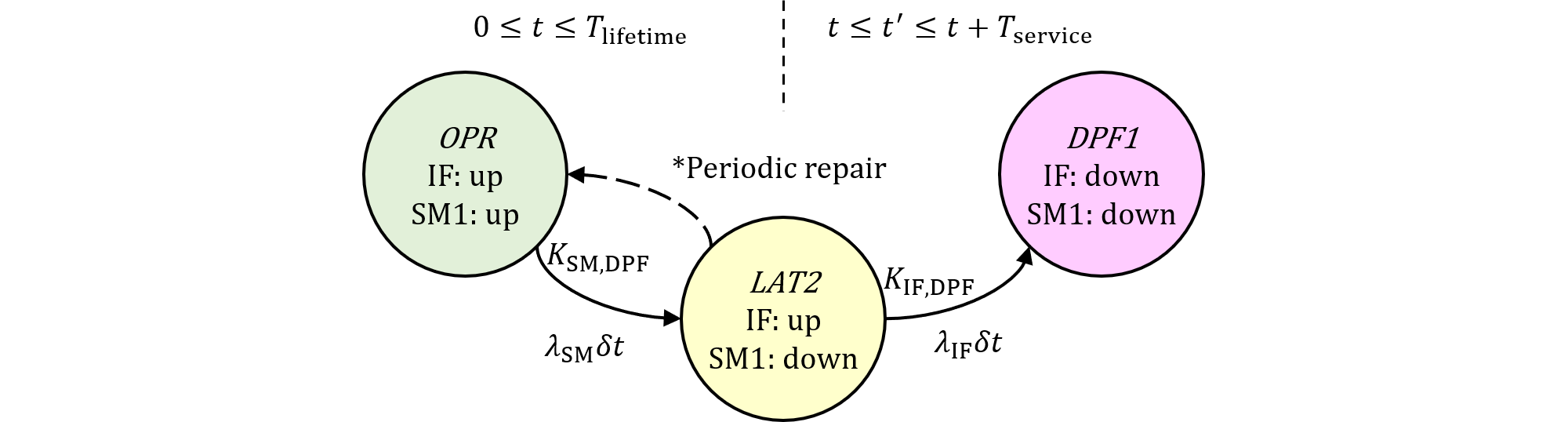
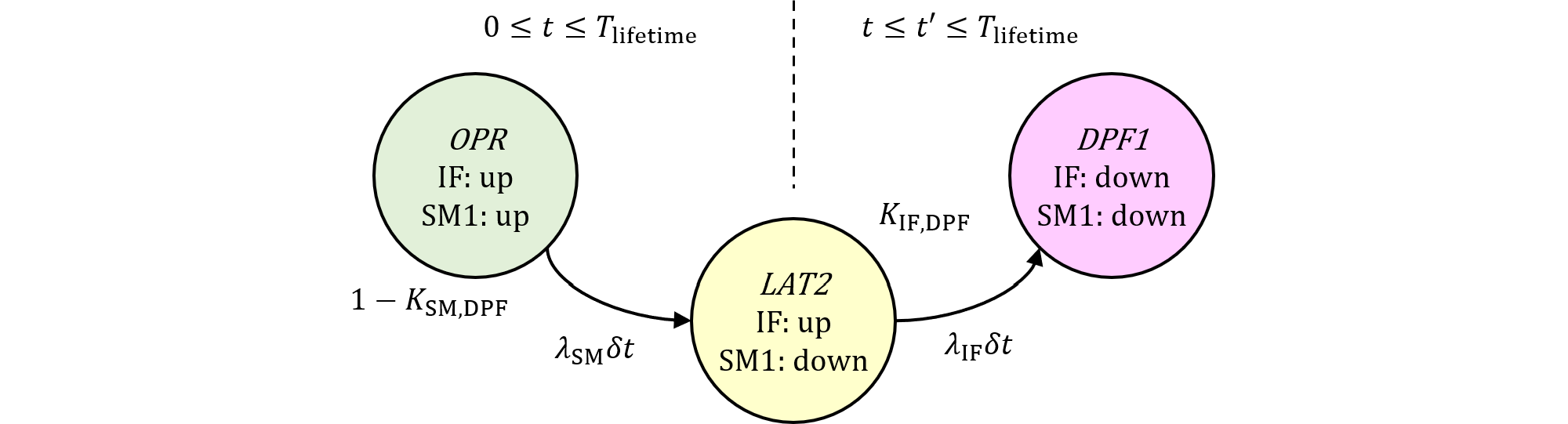
そして、$K_\text{IF,det}=1$の場合にMPF detectedをレイテントフォールト扱いとしないとして確率微分方程式を立て、それを解いています。その結果を示せば、
$$
\require{color}
\bbox[#ccffff,2pt]{M_\text{PMHF,RAMS2022}=(1-K_\text{IF,RF})\lambda_\text{IF}+K_\text{IF,RF}K_\text{IF,det}\alpha+2K_\text{IF,RF}(1-K_\text{IF,det})\beta\\
}
\tag{446.1}
$$
ただし、
$$
\begin{cases}
\begin{eqnarray}
\alpha&:=&\frac{1}{2}\lambda_{\mathrm{IF}}\lambda_{\mathrm{SM}}[(1-K_{\mathrm{SM,MPF}})T_\text{lifetime}+K_{\mathrm{SM,MPF}}\tau],\\
\beta&:=&\frac{1}{2}\lambda_{\mathrm{IF}}\lambda_{\mathrm{SM}}[(1-K_{\mathrm{MPF}})T_\text{lifetime}+K_{\mathrm{MPF}}\tau],\\
K_{\mathrm{MPF}}&:=&K_{\mathrm{IF,MPF}}+K_{\mathrm{SM,MPF}}-K_{\mathrm{IF,MPF}}K_{\mathrm{SM,MPF}}
\end{eqnarray}
\end{cases}
$$
これにおいて、まずnon redundantの場合である$K_\text{IF,det}=1$とすれば、
$$
\begin{eqnarray}
M_\text{PMHF,NRD}&=&M_\text{PMHF,RAMS 2022}\lvert_{K_\text{IF,det}=1}\\
&=&(1-K_\text{IF,RF})\lambda_\text{IF}+K_\text{IF,RF}\alpha
\end{eqnarray}\tag{446.2}
$$
これは(374.1)と同一です。
他方、redundantの場合である、$K_\text{IF,det}=0$かつ$K_\text{IF,RF}=1$とすれば、
$$
\begin{eqnarray}
M_\text{PMHF,RD}&=&M_\text{PMHF,RAMS 2022}\lvert_{K_\text{IF,det}=0,K_\text{IF,RF}=1}\\
&=&2\beta
\end{eqnarray}\tag{446.3}
$$
これは(374.2)と同一です。
また、IFRモデルでは、
$$
\begin{eqnarray}
M_\text{PMHF,IFR}&=&M_\text{PMHF,RAMS 2022}\lvert_{K_\text{IF,det}=0}\\
&=&(1-K_\text{IF,RF})\lambda_\text{IF}+2K_\text{IF,RF}\beta\\
\end{eqnarray}\tag{446.4}
$$
これは2020論文(22)、(108.2)及び(222.9)と同一です。
さらにIFUモデルでは、
$$
\begin{eqnarray}
M_\text{PMHF,IFU}&=&M_\text{PMHF,RAMS 2022}\lvert_{K_\text{IF,det}=0,K_\text{IF,MPF}=0}\\
&=&(1-K_\text{IF,RF})\lambda_\text{IF}+2K_\text{IF,RF}\alpha
\end{eqnarray}\tag{446.5}
$$
これは2020論文(19)、(221.9)と同一です。
 前のブログ
次のブログ
前のブログ
次のブログ