|
25 |
RAMS2026プレゼン資料 |
Posts Tagged with "ISO 26262"
既に発行済みのブログであっても適宜修正・追加することがあります。We may make changes and additions to blogs already published.
|
24 |
新PMHF式の導出 IFUモデル編 (3) |
ここで、$U_\text{SM}(t)$は、 $$ U_\text{SM}(t)=(1−K_\text{SM2,DPF})F_\text{SM}(t)+K_\text{SM2,DPF}F_\text{SM}(u),\ \ u:=t\bmod\tau \tag{1095.1} $$ と導出されますが、ここで故障率が非常に小さい($\lambda_\text{SM1}u\le\lambda_\text{SM1}t\ll1$)ことを利用すれば、 $$ \begin{aligned} U_\text{SM}(t)&=(1−K_\text{SM2,DPF})(1-e^{-\lambda_\text{SM1}t})+K_\text{SM2,DPF}(1-e^{-\lambda_\text{SM1}u})\\ &\approx(1−K_\text{SM2,DPF})\lambda_\text{SM1}t+K_\text{SM2,DPF}\lambda_\text{SM1}u,\ \ u:=t\bmod\tau \end{aligned} \tag{1095.2} $$
従って、(1094.2)及び(1094.4)を加えれば
$$ \begin{aligned} f_\text{VSG}(t)&=f_\text{SPF}(t)+f_\text{DPF}(t)\\ &\img[-1.35em]{/images/withinseminar.png}\\ &=\lambda_\text{IF,SPF}+U_\text{SM}(t)\lambda_\text{IF,DPF} \end{aligned} \tag{1095.3} $$
VSG確率密度関数が求められたので、これに(1095.2)を代入し、車両寿命間で積分します。
$$ \require{cancel} \begin{aligned} &PMHF(T):=\frac{1}{T}F_\text{VSG}(T)=\frac{1}{T}\int_0^Tf_\text{VSG}(t)dt\\ &\img[-1.35em]{/images/withinseminar.png}\\ &=\lambda_\text{IF,RF}+\frac{1}{2}\lambda_\text{IF,DPF}\left[\lambda_\text{SM1,DPF,lat}T+\lambda_\text{SM1,DPF,det}\tau\right] \end{aligned} \tag{1095.4} $$
$$\img[-1.35em]{/images/withinseminar.png}$$ これはISO 26262初版のPMHF公式と完全に一致します。
本稿はRAMS 2027に投稿予定であるため、重要な数式を一部秘匿しています。
|
23 |
新PMHF式の導出 IFUモデル編 (2) |
図1094.1にIF-SM1-SM2から構成されるサブシステムの状態遷移モデルを示します。
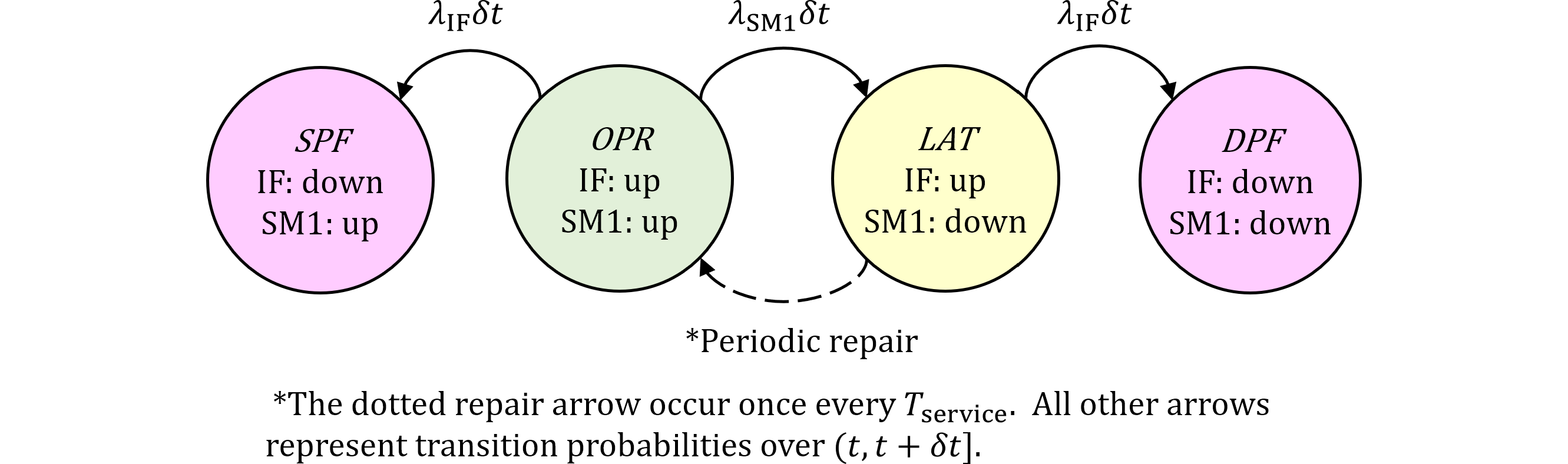
まず、微小時間間隔$[t, t+dt)$において初めてSPFによりVSGとなる場合を考えます。ここで、$F_\text{SPF}(t)$はSPF分岐による累積初回VSG確率を表すものとします。SPFは図1094.1においてOPR→SPFとなる場合です。ここで、IFの初回故障時刻を $\sigma_\text{IF}:=\inf\{s\ge0\mid \eta^\text{IF}_s\notin\mathcal{M}_\text{IF}\}$ とおきます。SPF分岐では、時刻$t$までIFが故障しておらず、時刻$t$でSM1が稼働中であり、区間$[t,t+dt)$でIFがSM1により防止できない故障集合$\mathcal{P}_\text{IF,SPF}$へ遷移します。 従って、IFとSMの故障は独立であること、及び条件つき確率の乗法定理を用いて
$$\img[-1.35em]{/images/withinseminar.png}$$
両辺を$dt$で割り、$dt\rightarrow0$の極限を取れば、
$$ f_\text{SPF}(t):=\frac{d}{dt}F_\text{SPF}(t)=A_\text{SM}(t)R_\text{IF}(t)\lambda_\text{IF,SPF} \tag{1094.2} $$
となります。さらに、通常の希事象近似ではIF自身の生存確率を$R_\text{IF}(t)\approx1$と置くため、
$$ f_\text{SPF}(t)\approx A_\text{SM}(t)\lambda_\text{IF,SPF} \tag{1094.3} $$
となります。ここで$A_\text{SM}(t)$は、OPR→SPF遷移に必要なSM1の稼働状態占有確率を表すため残します。一方、$R_\text{IF}(t)$は、IFが時刻$t$まで故障していないことを表す生存確率です。標準的なPMHF近似では、このIF自身の生存確率補正を1と置きます。
同様に初めてDPFによりVSGとなる場合を考えます。ここで、$F_\text{DPF}(t)$はDPF分岐による累積初回VSG確率を表すものとします。DPFは図1094.1においてLAT→DPFとなる場合です。この場合、時刻$t$でSM1は既に潜在故障状態にあり、IFはまだ故障していません。そのため、区間$[t,t+dt)$で後続のIF故障が発生するとDPFとなります。SM1は既に故障しているため、この後続IF故障は$\mathcal{P}_\text{IF,SPF}$ではなく、IF故障の全体集合$\mathcal{P}_\text{IF}$への遷移として扱います。
$$\img[-1.35em]{/images/withinseminar.png}$$
$\eta^\text{IF}_{t+dt}\in\mathcal{P}_\text{IF}$に注意します。SPFに遷移する場合は$\mathcal{P}_\text{IF,SPF}$への遷移を考えましたが、これはSM1が稼働している場合にSM1で防止できないIF故障だけがSPFとなるためです。一方、DPFに遷移する場合は既にSM1が潜在故障しているため、後続のIF故障はIF故障の全体集合$\mathcal{P}_\text{IF}$で扱います。
同様に両辺を$dt$で割り、$dt\rightarrow0$の極限を取れば、
$$ f_\text{DPF}(t):=\frac{d}{dt}F_\text{DPF}(t)=U_\text{SM}(t)R_\text{IF}(t)\lambda_\text{IF} \tag{1094.5} $$
となります。さらに、同じ希事象近似により$R_\text{IF}(t)\approx1$と置くため、
$$ f_\text{DPF}(t)\approx U_\text{SM}(t)\lambda_\text{IF} \tag{1094.6} $$
となります。
本稿はRAMS 2027に投稿予定であるため、重要な数式を一部秘匿しています。
|
22 |
新PMHF式の導出 IFUモデル編 |
以前の記事では確率の事象を記述するために $$ \Pr\{\text{IF up at }t\} \tag{1093.1} $$ 等と自然言語で記述していました。本稿からは確率論をベースにこれを集合で書くことにします。
確率空間$(\Omega, \mathcal{F}, \Pr)$を考えます。 IFのup state(動作状態)集合を$\mathcal{M}_\text{IF}$とし、$(\eta^\text{IF}_t)_{t\ge0}$を確率空間上のIFの確率過程とすれば、上記確率は、 $$ \Pr\{\eta^\text{IF}_t\in\mathcal{M}_\text{IF}\} \tag{1093.2} $$ と書けます。PMHFはVSGとなる確率の車両寿命平均であり、一度起きると再び動作することは無いと考えます。従って、
$$ M_\text{PMHF}:=\frac{1}{T}F_\text{VSG}(T) \tag{1093.3} $$ ただし、$T$は車両寿命です。ここで、最初にVSGとなる時刻を$\sigma_\text{VSG}$とすれば、それは以下で表せます。
$$ \sigma_\text{VSG}:=\inf\{t\ge0\mid N^\text{VSG}_t\ge1\} \tag{1093.4} $$ ただし、$(N^\text{VSG}_t)_{t\ge0}$はVSGの計数確率過程です。
また、反対にIFのdown state(不稼働状態)集合を$\mathcal{P}_\text{IF}$とすれば、VSGはIFUモデルの場合IFのフォールトのみで起こり、それはSPFとDPFに分解できることから、 $$ \mathcal{P}_\text{VSG}=\mathcal{P}_\text{IF,SPF}\cup\mathcal{P}_\text{IF,DPF},\ \ \mathcal{P}_\text{IF,SPF}\cap\mathcal{P}_\text{IF,DPF}=\varnothing \tag{1093.5} $$ Christiane Cocozza-Thivent他の論文"The Failure Rate in Reliability. Numerical Treatment"の(1.2)式によれば、Vesely故障率は以下のように定義されます。
$$ \begin{cases} \lambda_\text{v,IF,SPF}(t):=\displaystyle\lim_{dt\rightarrow0}\frac{\Pr\{\eta^\text{IF}_{t+dt}\in\mathcal{P}_\text{IF,SPF}\mid\eta^\text{IF}_{t}\in\mathcal{M}_\text{IF}\}}{dt},\\ \lambda_\text{v,IF,DPF}(t):=\displaystyle\lim_{dt\rightarrow0}\frac{\Pr\{\eta^\text{IF}_{t+dt}\in\mathcal{P}_\text{IF,DPF}\mid\eta^\text{IF}_{t}\in\mathcal{M}_\text{IF}\}}{dt} \end{cases} \tag{1093.6} $$
Vesely故障率をCTMCの遷移率(定数)とし、IFの故障率をSM1のカバレージ$K_\text{SM1,RF}$で分割すれば、 $$ \begin{cases} \lambda_\text{v,IF,SPF}(t)=\lambda_\text{IF,SPF}=(1-K_\text{SM1,RF})\lambda_\text{IF},\\ \lambda_\text{v,IF,DPF}(t)=\lambda_\text{IF,DPF}=K_\text{SM1,RF}\lambda_\text{IF} \end{cases} \tag{1093.7} $$ となります。ただし、Kパラメータの記法は規格第2版を踏襲し、オウナ記法としています。例えば、$K_\text{SM1,RF}$はSM1が持つ、IFに対する診断カバレージと読みます。
本稿はRAMS 2027に投稿予定であるため、重要な数式を一部秘匿しています。
|
19 |
【速報】RAMS 2027のプログラムマトリクスが発表 |
|
18 |
過去記事の訂正 (7) |
MPF detectedへの変更の再計算した結果を表を用いてまとめます。
| (a)SPF | (b)SPF | (c)DPF | (d)DPF | |
|---|---|---|---|---|
| LAT2分離 | $(1-K_\text{IF,RF})\lambda_\text{IF}-(1-K_\text{IF,RF})\alpha$(1086.6) | $(1-K_\text{IF,RF})\alpha$ (1087.5) |
$K_\text{IF,RF}\alpha$(1088.6) | $K_\text{IF,RF}\color{red}{(1-K_\text{IF,det})}\beta_\text{d}$ (1089.5) |
| SPF/DPF統合 | $(1-K_\text{IF,RF})\lambda_\text{IF}$ | $K_\text{IF,RF}\alpha+K_\text{IF,RF}\color{red}{(1-K_\text{IF,det})}\beta_\text{d}$ | ||
| 規格式1$\dagger\text{SM1}⇒\text{IF}$ | $(1-K_\text{IF,RF})\lambda_\text{IF}+K_\text{IF,RF}\alpha$ | |||
| 規格式3$\dagger$ | $(1-K_\text{IF,RF})\lambda_\text{IF}+K_\text{IF,RF}\alpha+K_\text{IF,RF}\color{red}{(1-K_\text{IF,det})}\beta_\text{d}$ | |||
ただし、 $$ \begin{cases} \alpha:=\frac{1}{2}\lambda_\text{IF}\lambda_\text{SM}\left[(1-K_\text{SM,MPF})T_\text{lifetime}+K_\text{SM,MPF}\tau\right]\\ \beta_\text{d}:=\frac{1}{2}\lambda_\text{IF}\lambda_\text{SM}\left[(1-K_\text{IF,MPF})T_\text{lifetime}+K_\text{IF,MPF}\tau\right] \end{cases} $$ です。
$$ \begin{cases} \text{非冗長系の時は} & \color{red}{K_\text{IF,det}}=1\\ \text{冗長系の時は} & \color{red}{K_\text{IF,det}}=0,\ K_\text{IF,RF}=1 \end{cases} $$ 表1091.1に対して、非冗長系、冗長系のKパラメータを上記に示すとおり代入した表を表1091.2及び表1091.3に示します。
非冗長系
| (a)SPF | (b)SPF | (c)DPF | (d)DPF | |
|---|---|---|---|---|
| LAT2分離 | $(1-K_\text{IF,RF})\lambda_\text{IF}-(1-K_\text{IF,RF})\alpha$ | $(1-K_\text{IF,RF})\alpha$ | $K_\text{IF,RF}\alpha$ | $0$ |
| SPF/DPF統合 | $(1-K_\text{IF,RF})\lambda_\text{IF}$ | $K_\text{IF,RF}\alpha$ | ||
| 規格式1$\dagger\text{SM1}⇒\text{IF}$ | $(1-K_\text{IF,RF})\lambda_\text{IF}+K_\text{IF,RF}\alpha$ | |||
| 規格式3$\dagger$ | $(1-K_\text{IF,RF})\lambda_\text{IF}+K_\text{IF,RF}\alpha$ | |||
$$ M_\text{PMHF,NRD}=\bbox[#ccffff,2pt]{(1-K_\text{IF,RF})\lambda_\text{IF}+K_\text{IF,RF}\alpha}\\ =(1-K_\text{IF,RF})\lambda_\text{IF}+\frac{1}{2}K_\text{IF,RF}\lambda_\text{IF}\lambda_\text{SM}\left[(1-K_\text{SM,MPF})T_\text{lifetime}+K_\text{SM,MPF}\tau\right] \tag{1091.1} $$
冗長系
| (a)SPF | (b)SPF | (c)DPF | (d)DPF | |
|---|---|---|---|---|
| LAT2分離 | $0$ | $0$ | $\alpha$ | $\beta_\text{d}$ |
| SPF/DPF統合 | $0$ | $\alpha+\beta_\text{d}$ | ||
| 規格式1$\dagger$ | $\alpha$ | |||
| 規格式3$\dagger$ | $\alpha+\beta_\text{d}$ | |||
$$ \begin{eqnarray} M_\text{PMHF,RD}&=&\bbox[#ccffff,2pt]{\alpha+\beta_\text{d}}\\ &=&\frac{1}{2}\lambda_\text{IF}\lambda_\text{SM}\left[(1-K_\text{SM,MPF})T_\text{lifetime}+K_\text{SM,MPF}\tau\right]\\ & &+\frac{1}{2}\lambda_\text{IF}\lambda_\text{SM}\left[(1-K_\text{IF,MPF})T_\text{lifetime}+K_\text{IF,MPF}\tau\right]\\ &=&\frac{1}{2}\lambda_\text{IF}\lambda_\text{SM}\left[(2-K_\text{SM,MPF}-K_\text{IF,MPF})T_\text{lifetime}+(K_\text{SM,MPF}+K_\text{IF,MPF})\tau\right] \end{eqnarray} \tag{1091.2} $$
$\dagger$規格式1: 規格第1版 Part 10-8.3.3の第1式の条件。ブログの図367.1)において、IFが後にフォールトする場合=(a)SPF、(b)SPF及び(c)DPF。(d)DPFはSMが後にフォールトする場合なので対象外
$\dagger$規格式3: 規格第1版 Part 10-8.3.3の第3式の条件。ブログの図367.1)において、IF, SMのフォールトの順を問わない場合=(a)SPF、(b)SPF、(c)DPF及び(d)DPF。
従来記事では、冗長系の式を$2\beta$とし、$K_\text{IF,MPF}$と$K_\text{SM,MPF}$を合成した$K_\text{MPF}$を用いていました。しかし、正しくは、LAT2⇒DPF(c)ではSM側のMPF検出率$K_\text{SM,MPF}$が効き、LAT1⇒DPF(d)ではIF側のMPF検出率$K_\text{IF,MPF}$が効きます。したがって、冗長系のPMHFは$2\beta$ではなく$\alpha+\beta_\text{d}$となります。
|
17 |
過去記事の訂正 (6) |
よって、MPF detectedを考慮した場合のPMHFは、それぞれの事象は排他であることから、(1086.6)、(1087.5)、(1088.6)、(1089.5)で求められた平均PUDを全て加えることで求められます。式の(a), (b), (c), (d)は図1085.1の遷移を示します。 $$ \begin{eqnarray} \require{cancel} M_\text{PMHF}&=&\overline{q_\text{SPF(a),IFU}}+\overline{q_\text{SPF(b),IFR}}+\overline{q_\text{DPF(c),IFR}}+\overline{q_\text{DPF(d),IFR}}\\ &=&\rlap{\hspace{23em}\img[-0.25em]{/images/left-arrow.png}(a)}(1-K_\text{IF,RF})\lambda_\text{IF}-\bcancel{(1-K_\text{IF,RF})\alpha}\\ & &\rlap{\hspace{23em}\img[-0.25em]{/images/left-arrow.png}(b)}+\bcancel{(1-K_\text{IF,RF})\alpha}\\ & &\rlap{\hspace{23em}\img[-0.25em]{/images/left-arrow.png}(c)}+K_\text{IF,RF}\alpha\\ & &\rlap{\hspace{23em}\img[-0.25em]{/images/left-arrow.png}(d)}+K_\text{IF,RF}\color{red}{(1-K_\text{IF,det})}\beta_\text{d}\\ &=&\bbox[#ccffff,2pt]{(1-K_\text{IF,RF})\lambda_\text{IF}+K_\text{IF,RF}\alpha+K_\text{IF,RF}\color{red}{(1-K_\text{IF,det})}\beta_\text{d}}\\ &=&(1-K_\text{IF,RF})\lambda_\text{IF}+\frac{1}{2}K_\text{IF,RF}\lambda_\text{IF}\lambda_\text{SM}\left[(1-K_\text{SM,MPF})T_\text{lifetime}+K_\text{SM,MPF}\tau\right]\\ & &+\frac{1}{2}K_\text{IF,RF}\color{red}{(1-K_\text{IF,det})}\lambda_\text{IF}\lambda_\text{SM}\left[(1-K_\text{IF,MPF})T_\text{lifetime}+K_\text{IF,MPF}\tau\right], \end{eqnarray} \tag{1090.1} $$
$$ ただし、\begin{cases} \alpha:=\frac{1}{2}\lambda_\text{IF}\lambda_\text{SM}\left[(1-K_\text{SM,MPF})T_\text{lifetime}+K_\text{SM,MPF}\tau\right]\\ \beta_\text{d}:=\frac{1}{2}\lambda_\text{IF}\lambda_\text{SM}\left[(1-K_\text{IF,MPF})T_\text{lifetime}+K_\text{IF,MPF}\tau\right] \end{cases} $$
この一般式に対して場合分けを行って、
非冗長系においては抑止されるフォールトは全て検出可能なので、(1090.1)において$\color{red}{K_\text{IF,det}}=1$とすれば$\beta_\text{d}$の項が消去され、 $$ \begin{eqnarray} M_\text{PMHF,NRD}&=&\bbox[#ccffff,2pt]{(1-K_\text{IF,RF})\lambda_\text{IF}+K_\text{IF,RF}\alpha}\\ &=&(1-K_\text{IF,RF})\lambda_\text{IF}+\frac{1}{2}K_\text{IF,RF}\lambda_\text{IF}\lambda_\text{SM}\left[(1-K_\text{SM,MPF})T_\text{lifetime}+K_\text{SM,MPF}\tau\right] \end{eqnarray} \tag{1090.2} $$
冗長系においては抑止されるフォールトは(1st SMでは)全て検出不可であり、逆に全て抑止されるため、(1090.1)において$\color{red}{K_\text{IF,det}}=0, K_\text{IF,RF}=1$とすれば、 $$ \begin{eqnarray} M_\text{PMHF,RD}&=&\bbox[#ccffff,2pt]{\alpha+\beta_\text{d}}\\ &=&\frac{1}{2}\lambda_\text{IF}\lambda_\text{SM}\left[(1-K_\text{SM,MPF})T_\text{lifetime}+K_\text{SM,MPF}\tau\right]\\ & &+\frac{1}{2}\lambda_\text{IF}\lambda_\text{SM}\left[(1-K_\text{IF,MPF})T_\text{lifetime}+K_\text{IF,MPF}\tau\right]\\ &=&\frac{1}{2}\lambda_\text{IF}\lambda_\text{SM}\left[(2-K_\text{SM,MPF}-K_\text{IF,MPF})T_\text{lifetime}+(K_\text{SM,MPF}+K_\text{IF,MPF})\tau\right] \end{eqnarray} \tag{1090.3} $$
このように、非冗長系と冗長系に対するPMHF式が導出されます。
上記場合分け1.の非冗長系の(1090.2)は、DPF項はSM側のLF量のみで決まります。これはIFのLFが無くなり、SMのLFのみになるためです。
上記場合分け2.の冗長系においては、従来記事では$2\beta$としていましたが、正しくは$\alpha+\beta_\text{d}$です。すなわち、LAT2⇒DPF(c)ではSM側のMPF検出率$K_\text{SM,MPF}$が効き、LAT1⇒DPF(d)ではIF側のMPF検出率$K_\text{IF,MPF}$が効きます。両者を合成した$K_\text{MPF}$を用いる必要はありません。
|
16 |
過去記事の訂正 (5) |
LAT1⇒DPFの平均PUDの計算
最後にLAT1からDPFへの平均PUDを計算します。
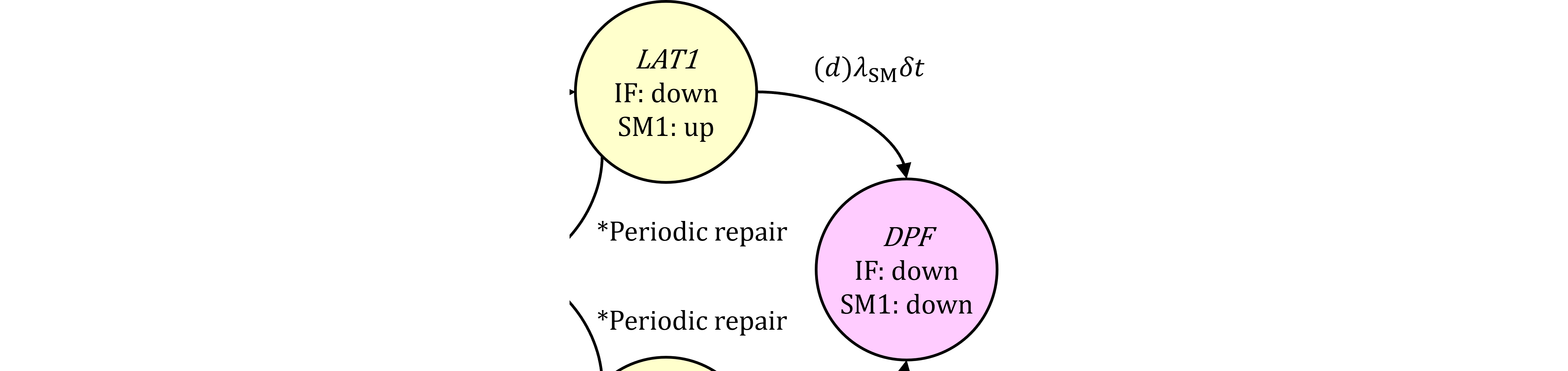
LAT1からDPFへの遷移(d)の平均PUDは、 $$ \begin{eqnarray} \overline{q_\text{DPF(d),IFR}}&=&\frac{1}{T_\text{lifetime}}\Pr\{\text{DPF via (d) at }T_\text{lifetime}\}\\ &=&\frac{1}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}\Pr\{\text{LAT1 at }t\cap\text{SM down in }(t, t+dt]\}\\ &=&\frac{1}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}\Pr\{\text{SM down in }(t, t+dt]\ |\ \text{LAT1 at }t\}\\ & &\ \ \ \ \cdot\Pr\{\text{LAT1 at }t\} \end{eqnarray} \tag{1089.1} $$
IF preventableのdown状態は、 $$ \begin{eqnarray} \Pr\{\text{IF}^{\text{R}}_{\text{prev}}\text{ down at }t\}&=&K_\text{IF,RF}\color{red}{(1-K_\text{IF,det})}\left[(1-K_\text{IF,MPF})F_\text{IF}(t)+K_\text{IF,MPF}F_\text{IF}(u)\right]\\ &=&K_\text{IF,RF}\color{red}{(1-K_\text{IF,det})}Q_\text{IF}(t) \end{eqnarray} \tag{1089.2} $$ となります。ただし、$Q_\text{IF}(t):=(1-K_\text{IF,MPF})F_\text{IF}(t)+K_\text{IF,MPF}F_\text{IF}(u)$です。
また、SMのup状態を、$A_\text{SM}(t):=(1-K_\text{SM,MPF})R_\text{SM}(t)+K_\text{SM,MPF}R_\text{SM}(u)$とすれば、 $$ \begin{eqnarray} \Pr\{\text{LAT1 at }t\}&=&\Pr\{\text{IF}^{\text{R}}_{\text{prev}}\text{ down at }t\cap\text{SM up at }t\}\\ &=&K_\text{IF,RF}\color{red}{(1-K_\text{IF,det})}\left[(1-K_\text{IF,MPF})F_\text{IF}(t)+K_\text{IF,MPF}F_\text{IF}(u)\right]A_\text{SM}(t)\\ &=&K_\text{IF,RF}\color{red}{(1-K_\text{IF,det})}Q_\text{IF}(t)A_\text{SM}(t) \end{eqnarray} \tag{1089.3} $$ と書けます。
一方、(1089.1)の右辺積分中の条件付き確率式は、 $$ \require{cancel} \begin{eqnarray} &&\hspace{-6em}\Pr\{\text{SM down in }(t, t+dt]\ |\ \text{LAT1 at }t\}\\ &=&\Pr\{\text{SM down in }(t, t+dt]\ |\ \text{SM up at }t\cap\bcancel{\text{IF}^{\text{R}}_{\text{prev}}\text{ down at }t}\}\\ &=&\Pr\{\text{SM down in }(t, t+dt]\ |\ \text{SM up at }t\}\\ &=&\lambda_\text{SM}dt \end{eqnarray} \tag{1089.4} $$ です。
(1089.3)、(1089.4)を(1089.1)に用いれば、 $$ \begin{eqnarray} (1089.1)&=&\frac{K_\text{IF,RF}\color{red}{(1-K_\text{IF,det})}}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}\left[(1-K_\text{IF,MPF})F_\text{IF}(t)+K_\text{IF,MPF}F_\text{IF}(u)\right]\\ & &\cdot\left[(1-K_\text{SM,MPF})f_\text{SM}(t)+K_\text{SM,MPF}f_\text{SM}(u)\right]dt\\ &\approx&\bbox[#ccffff,2pt]{K_\text{IF,RF}\color{red}{(1-K_\text{IF,det})}\beta_\text{d}},\\ & &\text{ただし、}\beta_\text{d}:=\frac{1}{2}\lambda_\text{IF}\lambda_\text{SM}\left[(1-K_\text{IF,MPF})T_\text{lifetime}+K_\text{IF,MPF}\tau\right] \end{eqnarray} \tag{1089.5} $$ です。
従来記事では、(1089.5)の積分結果を$\beta$とし、$K_\text{IF,MPF}$と$K_\text{SM,MPF}$を合成した$K_\text{MPF}$を用いていました。しかし、LAT1⇒DPF(d)ではIFが先に潜在しており、SMは後から発生する故障です。したがって、露出時間を決めるのはIF側のMPF検出率$K_\text{IF,MPF}$であり、SM側の$K_\text{SM,MPF}$は一次近似結果には現れません。
すなわち、この遷移(d)に対応する量は、従来の$\beta$ではなく、 $\beta_\text{d}:=\frac{1}{2}\lambda_\text{IF}\lambda_\text{SM}\left[(1-K_\text{IF,MPF})T_\text{lifetime}+K_\text{IF,MPF}\tau\right]$ です。
|
15 |
過去記事の訂正 (4) |
LAT2⇒DPFの平均PUDの計算
LAT2⇒DPFの遷移(c)の平均PUDを計算します。
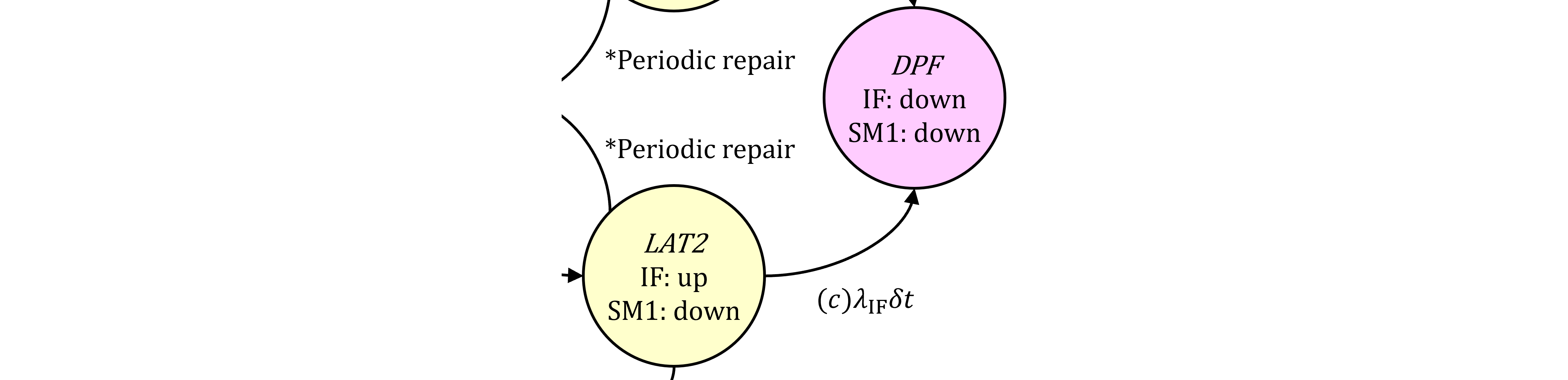
LAT2の状態のうち、IF preventable部分について考えます。
$$ \begin{eqnarray} \overline{q_\text{DPF(c),IFR}}&=&\frac{1}{T_\text{lifetime}}\Pr\{\text{DPF via (c) at }T_\text{lifetime}\}\\ &=&\frac{1}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}\Pr\{\text{LAT2}_{\text{prev}}\text{ at }t\cap\text{IF}^{\text{R}}\text{ down in }(t, t+dt]\}\\ &=&\frac{1}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}\Pr\{\text{IF}^{\text{R}}\text{ down in }(t, t+dt]\ |\ \text{LAT2}_{\text{prev}}\text{ at }t\}\\ & &\ \ \ \ \cdot\Pr\{\text{LAT2}_{\text{prev}}\text{ at }t\} \end{eqnarray} \tag{1088.1} $$
IF preventableのup状態は、従来はMPF detectedをMPF latent扱いとしていましたが、本再検討ではMPF detectedをnon faultyとして扱います。したがって、IF preventableのup状態は、 $$ \begin{eqnarray} \Pr\{\text{IF}^{\text{R}}_{\text{prev}}\text{ up at }t\}&=&K_\text{IF,RF}\color{red}{K_\text{IF,det}}\left[R_\text{IF}(t)+F_\text{IF}(t)\right]\\ & &+K_\text{IF,RF}\color{red}{(1-K_\text{IF,det})}\left[(1-K_\text{IF,MPF})R_\text{IF}(t)+K_\text{IF,MPF}R_\text{IF}(u)\right]\\ &=&K_\text{IF,RF}\color{red}{K_\text{IF,det}}+K_\text{IF,RF}\color{red}{(1-K_\text{IF,det})}A_\text{IF}(t) \end{eqnarray} \tag{1088.2} $$ となります。ただし、$A_\text{IF}(t):=(1-K_\text{IF,MPF})R_\text{IF}(t)+K_\text{IF,MPF}R_\text{IF}(u)$です。
また、SMのdown状態を、$Q_\text{SM}(t):=(1-K_\text{SM,MPF})F_\text{SM}(t)+K_\text{SM,MPF}F_\text{SM}(u)$とすれば、 $$ \begin{eqnarray} \Pr\{\text{LAT2}_{\text{prev}}\text{ at }t\}&=&\Pr\{\text{IF}^{\text{R}}_{\text{prev}}\text{ up at }t\cap\text{SM down at }t\}\\ &=&\left[K_\text{IF,RF}\color{red}{K_\text{IF,det}}+K_\text{IF,RF}\color{red}{(1-K_\text{IF,det})}A_\text{IF}(t)\right]Q_\text{SM}(t) \end{eqnarray} \tag{1088.3} $$ となります。
一方、(1088.1)の右辺積分中の条件付き確率式は、 $$ \require{cancel} \begin{eqnarray} &&\hspace{-6em}\Pr\{\text{IF}^{\text{R}}\text{ down in }(t, t+dt]\ |\ \text{LAT2}_{\text{prev}}\text{ at }t\}\\ &=&\Pr\{\text{IF}^{\text{R}}\text{ down in }(t, t+dt]\ |\ \text{IF}^{\text{R}}_{\text{prev}}\text{ up at }t\cap\bcancel{\text{SM down at }t}\}\\ &=&\Pr\{\text{IF}^{\text{R}}\text{ down in }(t, t+dt]\ |\ \text{IF}^{\text{R}}\text{ up at }t\}\\ &=&\lambda_\text{IF}dt \end{eqnarray} \tag{1088.4} $$ です。
(1088.3)、(1088.4)を(1088.1)に用いれば、 $$ \begin{eqnarray} (1088.1)&=&\frac{K_\text{IF,RF}\color{red}{K_\text{IF,det}}\lambda_\text{IF}}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}\left[(1-K_\text{SM,MPF})F_\text{SM}(t)+K_\text{SM,MPF}F_\text{SM}(u)\right]dt\\ & &+\frac{K_\text{IF,RF}\color{red}{(1-K_\text{IF,det})}}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}\left[(1-K_\text{SM,MPF})F_\text{SM}(t)+K_\text{SM,MPF}F_\text{SM}(u)\right]\\ & &\cdot\left[(1-K_\text{IF,MPF})f_\text{IF}(t)+K_\text{IF,MPF}f_\text{IF}(u)\right]dt \end{eqnarray} \tag{1088.5} $$ となります。
ここで、(1088.5)の第二積分において、周期検査により露出時間が短縮されるかどうかを決めるのは、先に潜在しているSM側の$F_\text{SM}(u)$です。後から発生するIF故障密度側の$f_\text{IF}(u)$により、積分結果がさらに$\tau$側へ移るわけではありません。したがって、第二積分も従来の$\beta$ではなく、$\alpha$となります。
よって、正しい積分公式より、 $$ \begin{eqnarray} (1088.5)&\approx&K_\text{IF,RF}\color{red}{K_\text{IF,det}}\alpha+K_\text{IF,RF}\color{red}{(1-K_\text{IF,det})}\alpha\\ &=&\bbox[#ccffff,2pt]{K_\text{IF,RF}\alpha},\\ & &\text{ただし、} \alpha:=\frac{1}{2}\lambda_\text{IF}\lambda_\text{SM}\left[(1-K_\text{SM,MPF})T_\text{lifetime}+K_\text{SM,MPF}\tau\right] \end{eqnarray} \tag{1088.6} $$ です。
従来記事では、(1088.5)の第二積分を$\beta$とし、$K_\text{IF,MPF}$と$K_\text{SM,MPF}$を合成した$K_\text{MPF}$を用いていました。しかし、LAT2⇒DPF(c)ではSMが先に潜在しており、IFは後から発生する故障です。したがって、露出時間を決めるのはSM側のMPF検出率$K_\text{SM,MPF}$であり、IF側の$K_\text{IF,MPF}$は一次近似結果には現れません。
|
12 |
過去記事の訂正 (3) |
LAT2⇒SPFの平均PUDの計算
次にLAT2からSPFの遷移(b)の平均PUDを計算します。この確率積分も、IF non preventable部分に関するものであるため、MPF detectedの変更の影響を受けません。
本稿では、旧記事における状態整理表は再掲せず、導出に必要な量のみを以下に定義します。ここで、周期検査間隔を$\tau$、車両寿命を$T_\text{lifetime}$とし、$u:=t\bmod\tau$とします。

LAT2の状態のうち、IF non preventable部分について考えます。
$$ \begin{eqnarray} \overline{q_{\text{SPF(b),IFR}}}&=&\frac{1}{T_\text{lifetime}}\Pr\{\text{SPF via (b) at }T_\text{lifetime}\}\\ &=&\frac{1}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}\Pr\{\text{LAT2}_{\overline{\text{prev}}}\text{ at }t\cap\text{IF}^{\text{U}}\text{ down in }(t, t+dt]\}\\ &=&\frac{1}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}\Pr\{\text{IF}^{\text{U}}\text{ down in }(t, t+dt]\ |\ \text{LAT2}_{\overline{\text{prev}}}\text{ at }t\}\\ & &\ \ \ \ \cdot\Pr\{\text{LAT2}_{\overline{\text{prev}}}\text{ at }t\} \end{eqnarray} \tag{1087.1} $$
ここで、IF non preventableのup状態は、$\Pr\{\text{IF}^{\text{U}}_{\overline{\text{prev}}}\text{ up at }t\}=(1-K_\text{IF,RF})R_\text{IF}(t)$です。また、SMのdown状態を、 $Q_\text{SM}(t):=(1-K_\text{SM,MPF})F_\text{SM}(t)+K_\text{SM,MPF}F_\text{SM}(u)$と定義すれば、 $$ \begin{eqnarray} \Pr\{\text{LAT2}_{\overline{\text{prev}}}\text{ at }t\}&=&\Pr\{\text{IF}^{\text{U}}_{\overline{\text{prev}}}\text{ up at }t\cap\text{SM down at }t\}\\ &=&(1-K_\text{IF,RF})R_\text{IF}(t)Q_\text{SM}(t) \end{eqnarray} \tag{1087.2} $$ となります。
一方、(1087.1)の右辺積分中の条件付き確率式は、 $$ \require{cancel} \begin{eqnarray} &&\hspace{-6em}\Pr\{\text{IF}^{\text{U}}\text{ down in }(t, t+dt]\ |\ \text{LAT2}_{\overline{\text{prev}}}\text{ at }t\}\\ &=&\Pr\{\text{IF}^{\text{U}}\text{ down in }(t, t+dt]\ |\ \text{IF}^{\text{U}}_{\overline{\text{prev}}}\text{ up at }t\cap\bcancel{\text{SM down at }t}\}\\ &=&\Pr\{\text{IF}^{\text{U}}\text{ down in }(t, t+dt]\ |\ \text{IF}^{\text{U}}\text{ up at }t\}\\ &=&\lambda_\text{IF}dt \end{eqnarray} \tag{1087.3} $$ です。
よって、(1087.1)式は、 $$ \begin{eqnarray} (1087.1)&=&\frac{1-K_\text{IF,RF}}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}Q_\text{SM}(t)R_\text{IF}(t)\lambda_\text{IF}dt\\ &=&\frac{1-K_\text{IF,RF}}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}Q_\text{SM}(t)f_\text{IF}(t)dt \end{eqnarray} \tag{1087.4} $$ となります。
ここで、$Q_\text{SM}(t)=(1-K_\text{SM,MPF})F_\text{SM}(t)+K_\text{SM,MPF}F_\text{SM}(u)$ であるため、(1087.4)は、 $$ \begin{eqnarray} (1087.4)&\approx&\frac{1-K_\text{IF,RF}}{2}\lambda_\text{IF}\lambda_\text{SM}\left[(1-K_\text{SM,MPF})T_\text{lifetime}+K_\text{SM,MPF}\tau\right]\\ &=&\bbox[#ccffff,2pt]{(1-K_\text{IF,RF})\alpha},\\ & &\text{ただし、} \alpha:=\frac{1}{2}\lambda_\text{IF}\lambda_\text{SM}\left[(1-K_\text{SM,MPF})T_\text{lifetime}+K_\text{SM,MPF}\tau\right] \end{eqnarray} \tag{1087.5} $$ です。
この導出では、SMが既にdownしている状態からIF non preventable故障が発生するため、積分の基本形は$Q_\text{SM}(t)f_\text{IF}(t)$となります。したがって、前稿と同じ$\alpha$が現れ、MPF detectedの扱いを変更しても、このSPF(b)項の結果は変わりません。
ページ:
