A paper by Atsushi Sakurai, President of FS Micro, Inc. (Nagoya, Japan), an ISO 26262 functional safety (Note 1) consulting firm, has been accepted for publication on December 3, 2020, at the 67th RAMS 2021, an international conference on reliability sponsored by the IEEE (Note 2). RAMS 2021 (Note 3) will be held January 25-28, 2021, in Orlando, Florida, USA. The author's paper was accepted by RAMS for the second consecutive time, following in January 2020. The author also received the best paper award at the 14th ISPCE 2017 (Note 4), an international conference on product safety, in 2017.

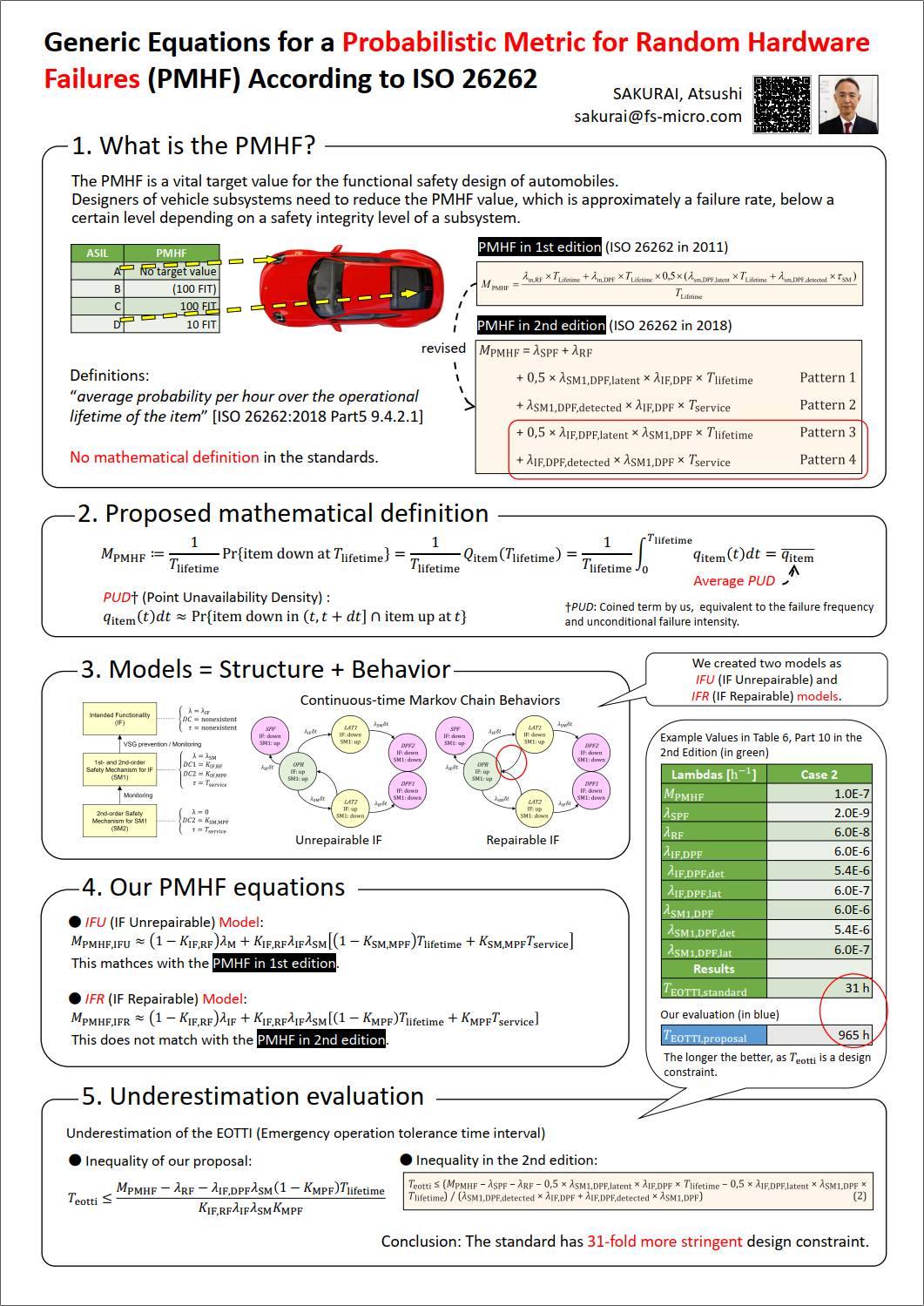
The title of the paper is "A Framework for Performing Quantitative Fault Tree Analyses for Subsystems with Periodic Repairs." This paper proposes a method to correctly evaluate "Random Hardware Failure Probabilistic Metrics" (PMHF, Note 5) of automotive electronics using quantitative "Fault Tree Analysis" (FTA, Note 6).
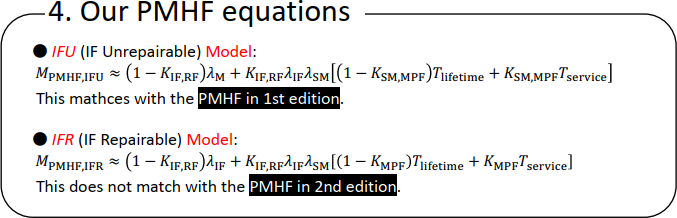
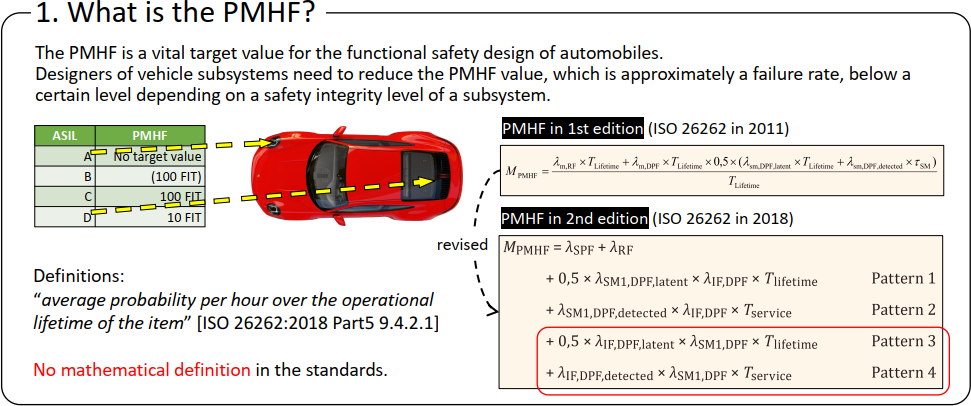
In 2018, the second edition of ISO 26262, the international standard for functional safety in automotive electronics, was published. In this second edition, the mathematical definition of the PMHF formula is not clearly stated. Furthermore, the method of quantitative FTA is not clear, and therefore there were no guidelines for calculating the PMHF value, as a design target.
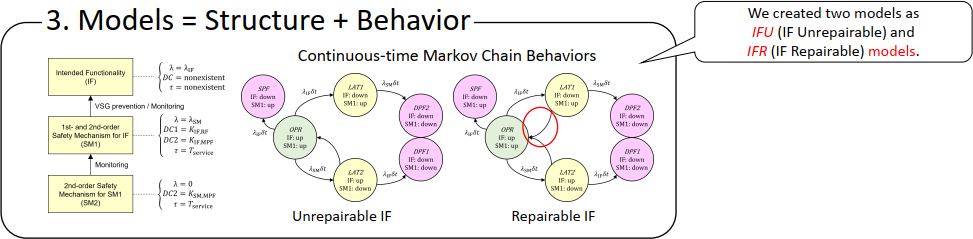
This paper provides a concrete framework for calculating PMHF values using quantitative FTAs, based on the PMHF formula presented by the same author at RAMS 2020 in January 2020. It prevents underestimation of the PMHF value. This paper is expected to improve the safety of fault-tolerant systems (Note 7), such as automated driving systems, and to deter accidents due to failures.
Notes
Note 1: Functional safety is the concept of improving safety at the system level by implementing various safety measures. ISO 26262 is an international standard for functional safety for electrical and electronic equipment in vehicles.
Note 2: IEEE is an abbreviation for Institute of Electrical and Electronics Engineers. It is the world's largest conference on electrical and electronic engineering technology in terms of the number of participants and countries.
Note 3: RAMS 2021 means The 67th Annual Reliability & Maintainability Symposium, an annual international conference on reliability engineering sponsored by the IEEE Reliability Society. http://rams.org/
Note 4: ISPCE is an abbreviation for IEEE Symposium on Product Compliance Engineering.
It is an annual international conference on product safety sponsored by the IEEE Product Safety Society. http://2017.psessymposium.org/
Note 5: PMHF is an abbreviation for Probabilistic Metric for Random Hardware Failures. In automotive electrical and electronic systems, it is a design target value for hardware, averaging the probability of system failure over the lifetime of the vehicle.
Note 6: FTA is an abbreviation for Fault Tree Analysis. A deductive safety analysis method that quantitatively demonstrates the likelihood of hazardous events by constructing a tree structure of failure events and calculating the safety goal violation probability.
Note 7: A fault-tolerant system is a safety system that can substitute its original function without immediate loss of function in the event of a failure.
 前のブログ
次のブログ
前のブログ
次のブログ