|
11 |
PMHF式関連論文Rogova2019 (3) |
仮定のまとめ
本論文$\dagger$はその中程に、置いた4つの仮定をまとめてリストしています。
(i) すべての危険故障の故障率は,λD である(IEC 61508 の概念では DD と DU を区別せず,ISO 26262 の概念では SPF,RF,DPF 及び MPF を区別しない)
(ii) PFH 公式におけるプルーフテスト間隔$\tau$は、PMHF 公式における運転寿命間隔 $T_{Lifetime}$と等価である
(iii) システムは修理不可能である
(iv) チャネルが同一で独立している
これはいずれも誤りです。一項目ずつ見ていきます。
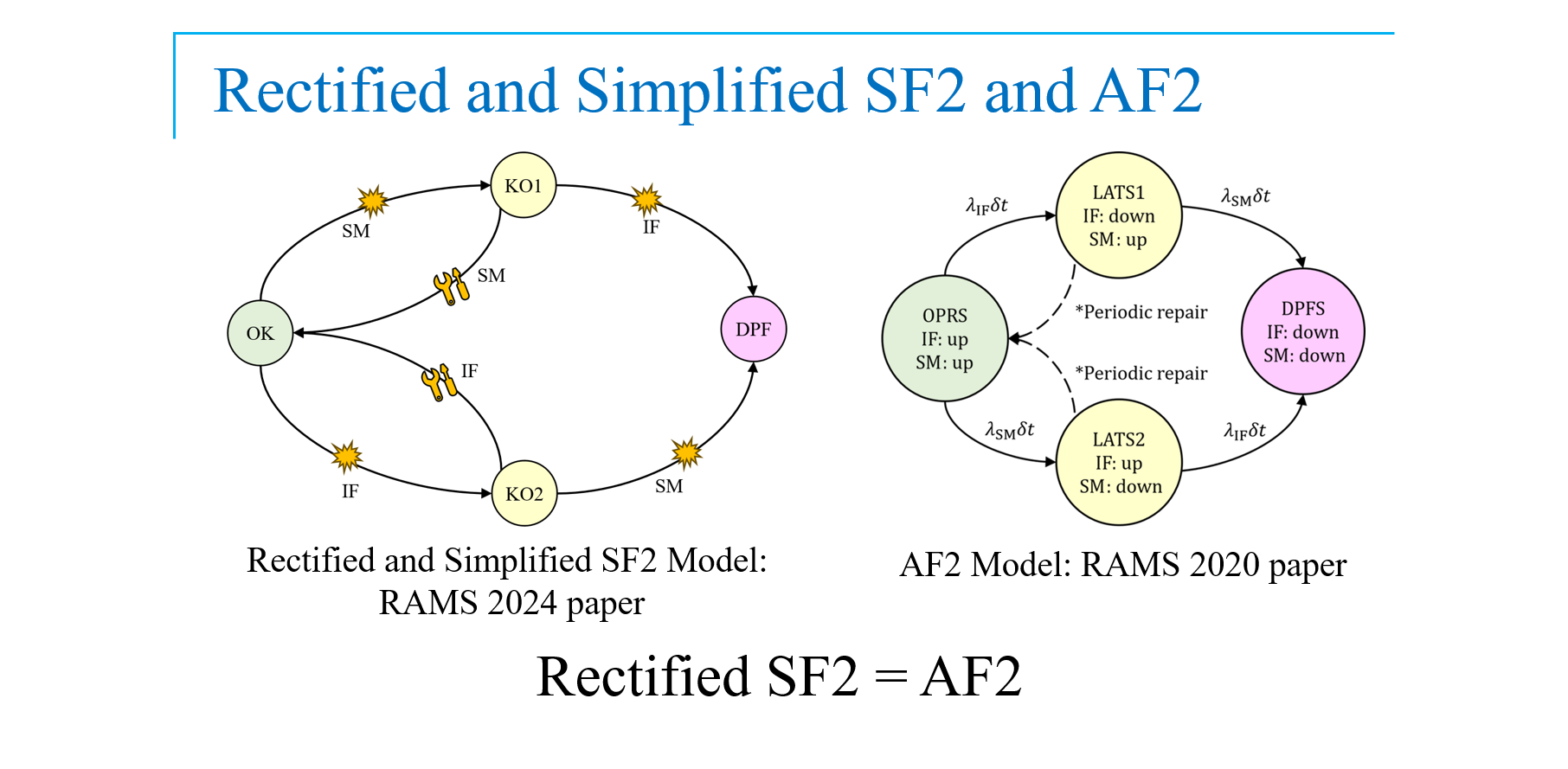
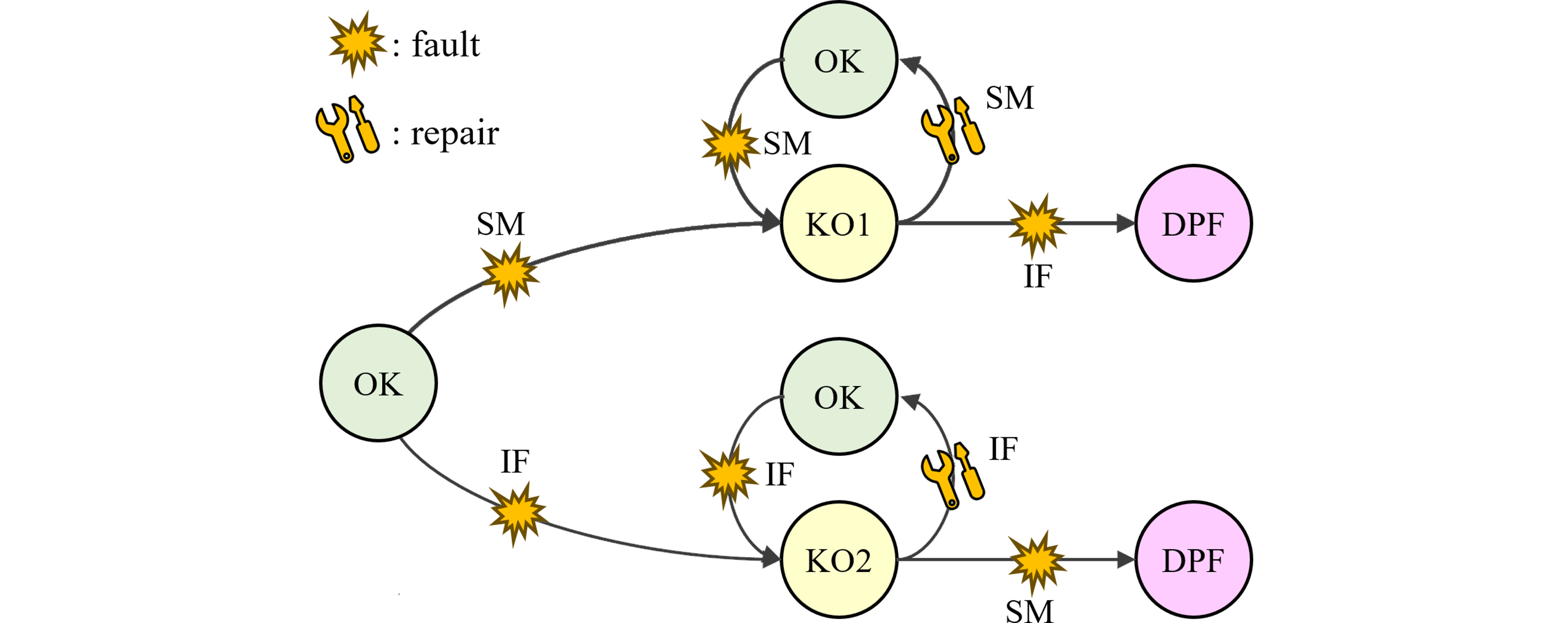
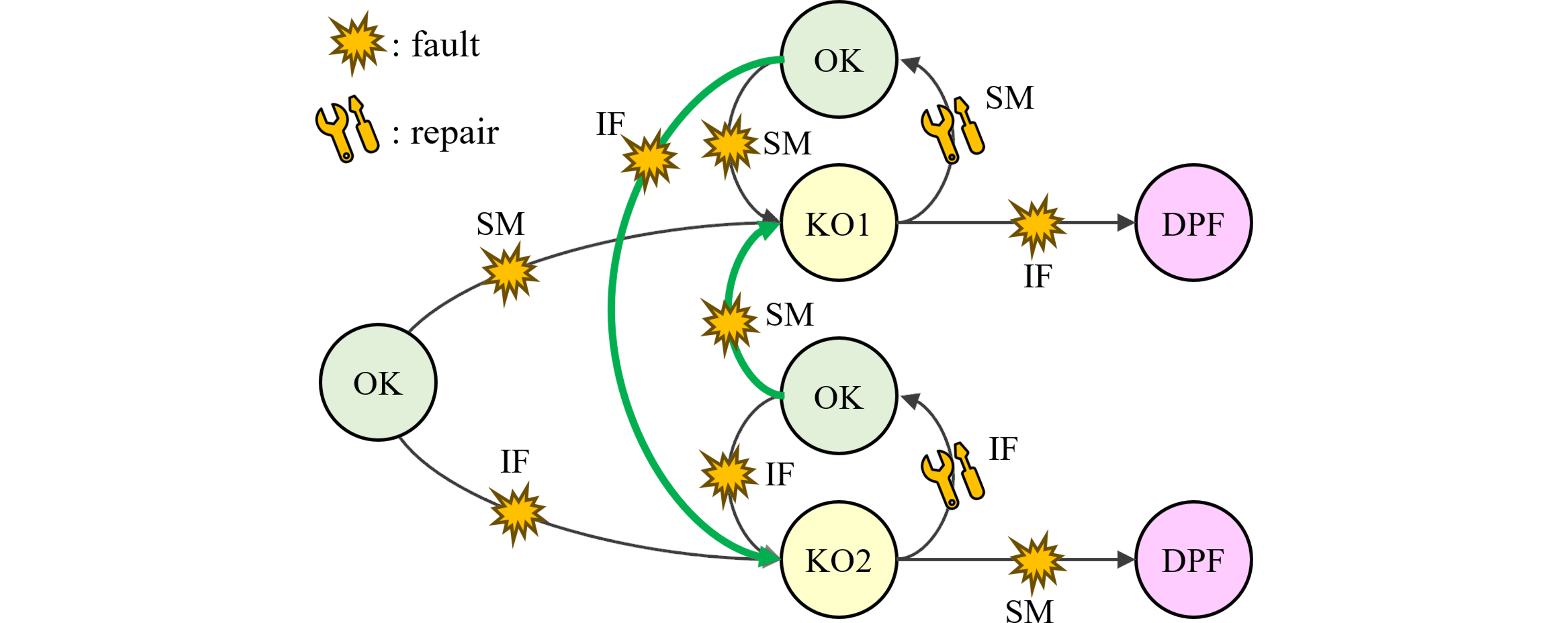
- IEC 61508はいざ知らず、ISO 26262においてはSPF, RFとは区別せず、DPF, MPFも区別せずで良いですが、それら2グループには明確な区別があります。言うまでもなく故障によるVSG確率が全く異なるため、それを考慮しなければなりません。具体的にはDPFは2重故障を意味するため、故障確率の2乗項が出現します。
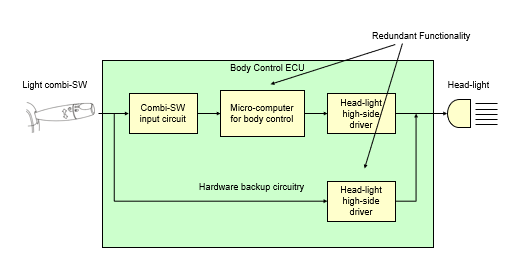
- 「PMHF式では$\tau=T_{lifetime}$として良い」と言っていますが、前稿で指摘したようにこれは誤りで、ISO 26262にもプルーフテストというか定期検査修理は存在するため、テスト周期は$\tau$となり、車両寿命ではありません。反対にこう仮定すると、2nd SMの存在が無いことになります。規格書では2nd SMの存在がブロック図に書かれているにも関わらず、それが無視されています。
- ISO 26262で対象とするサブシステムは修理可能です。Part 10のPMHF式の箇所に、ドライバーがMPFを通知され、修理工場へ持ち込む表現があります。もちろんMPFを検出するのが2nd SMです。
- チャネルは前項のように、独立であっても同一ではありません。「冗長」は必ずしも対称冗長を意味しません。
以上から、論文途中の仮定リストの全点が誤っている(=ISO 26262非互換である)ため、ここから先の検討は不要となります。
$\dagger$E. Rogova, C. Nowak, M. Ramold, et al., "Comparison of Analytical Formulas of PFH and PMHF Calculation for M-out-of-N Redundancy Architecture," Europ. Safe. Reliab. Conf.,, pp.1-5, 2019