パターン2
続いてパターン2です。弊社のやり方はCTMCの原理を用い、時刻$t$におけるDPF確率密度を求め、$0$から$T_\text{lifetime}$まで積分するというものです。
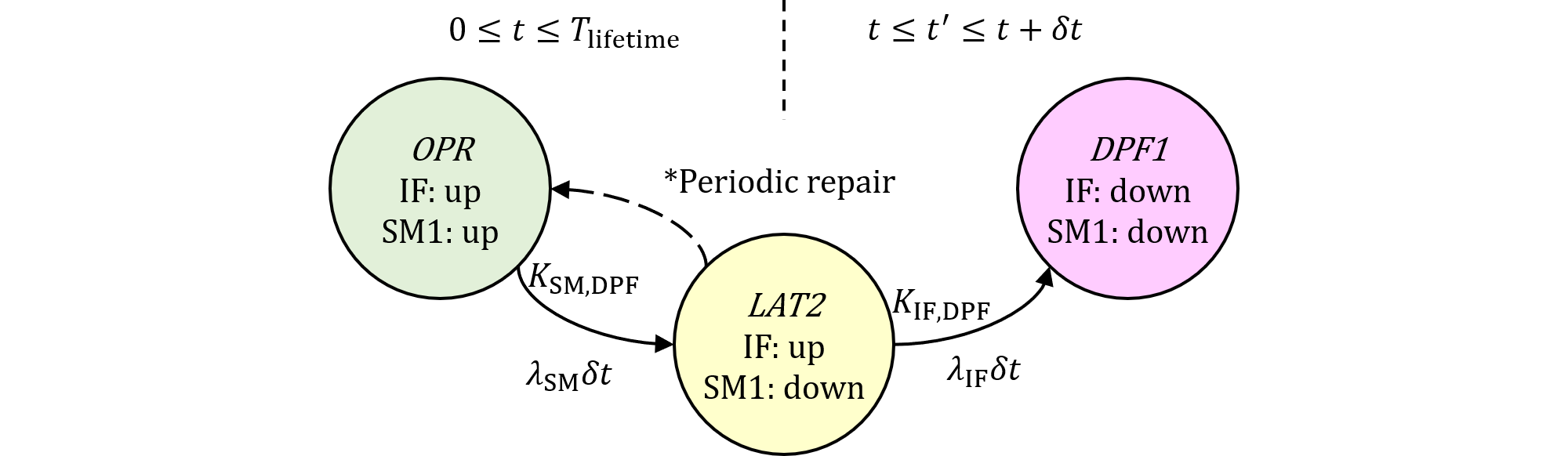
- Pattern 2: SM1⇒IFの順にフォールトが発生し、SM1のフォールトは、SM2によって緩和され通知される。フォールトの暴露時間は、運転手が修理のために車両を持ち込むのに必要な予想される時間。
これはSM1のフォールトが2nd SMの定期周期$T_\text{service}$により検査され、検出割合は$K_\text{SM,DPF}$でありその全量が修理されるパターンです。時刻$t$までに最初のSM1のフォールトが起き、それ以降$t'(>=t)$がVSGとなる2つ目のIFのフォールトが起きた時刻とします。
同様に、IFのフォールトに関する$t$から$t+\delta t$までのDPF確率密度を求めます。次にサブシステムについて、DPF VSGとなる確率密度を0から$T_\text{lifetime}$まで積分します。
まず、検出される部分のSM1は周期的に修理されるため、SM1の$LAT2$での状態確率は、$u\equiv t\bmod T_\text{service}$とすれば、 $$ \begin{eqnarray} \Pr\{\text{SM1(det) in }LAT2\}&=&\Pr\{\text{SM1 down at }u\cap\text{SM1 fault detected}\}\\ &=&K_\text{SM,DPF}F_\text{SM}(u) \end{eqnarray}\tag{475.1} $$
次にIFの$LAT2$での状態確率は、 $$ \begin{eqnarray} \Pr\{\text{IF in }LAT2\}&=&\Pr\{\text{IF up at }t\cap\text{IF fault prevented}\}\\ &=&\Pr\{\text{IF up at }t\}\Pr\{\text{IF fault prevented}\} =K_\text{IF,DPF}R_\text{IF}(t) \end{eqnarray}\tag{475.2} $$
$LAT2$から$DPF1$への微小時間間隔$\delta t$での遷移確率は、IFがフォールトによりDPFとなる場合であり、 $$ \Pr\{\text{IF down in }(t, t+\delta t] | \text{IF up at }t\}=\lambda_\text{IF}\delta t \tag{475.3} $$ 従って、状態確率(475.2)と遷移確率(475.3)の積をとりIFの$(t,t+\delta t]$における確率密度を求めれば、 $$ \begin{eqnarray} \Pr\{\text{IF in }LAT2&\text{ at }&t\cap\text{IF down in }(t, t+\delta t]\}\\ &=&\Pr\{\text{IF up at }t\cap\text{IF fault prevented}\cap\text{IF down in }(t, t+\delta t]\}\\ &=&\Pr\{\text{IF up at }t\}\Pr\{\text{IF fault prevented}\}\\ &&\cdot\Pr\{\text{IF down in }(t, t+\delta t] | \text{IF up at }t\}\\ &=&K_\text{IF,DPF}R_\text{IF}(t)\lambda_\text{IF}\delta t=K_\text{IF,DPF}f_\text{IF}(t)\delta t \end{eqnarray}\tag{475.4} $$
IFとSM1にはフォールトの生起について独立であるため、各々の確率はかけることができます。よって、 IFの項(475.4)とSM1の項(475.1)の積をとり、$0$から$T_\text{lifetime}$まで積分して時間平均をとると、 $$ \begin{eqnarray} M_\text{PMHF,P2}&=&\frac{1}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}d\!\Pr\{\text{LAT2 at }t\cap\text{IF fault prevented}\\ &&\cap\ \text{IF down in }(t, t+\delta t]\}\\ &=&\frac{1}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}d\!\Pr\{\text{IF up at }t\cap\text{SM1 down at }u\cap\text{SM1 fault detected}\\ &&\cap\ \text{IF fault prevented}\cap\text{IF down in }(t, t+\delta t]\}\\ &=&\frac{1}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}\Pr\{\text{SM1 down at }u\cap\text{SM1 fault detected}\}\\ &&\cdot d\!\Pr\{\text{IF up at }t\cap\text{IF fault prevented}\cap\text{IF down in }(t, t+\delta t]\}\\ &=&\frac{1}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}K_\text{SM,DPF}F_\text{SM}(u)K_\text{IF,DPF}f_\text{IF}(t)dt\\ &\approx&\frac{1}{2}K_\text{IF,DPF}K_\text{SM,DPF}\lambda_\text{IF}\lambda_\text{SM}T_\text{service}\\ &=&\frac{1}{2}\lambda_\text{SM,DPF,det}\lambda_\text{IF,DPF}T_\text{service} \end{eqnarray}\tag{475.5} $$ なお、式変形中に弊社積分公式を使用しています。
(475.5)と、図475.2に引用する規格第2版式のPattern 2を比較すると、規格式の値は不一致となります。

また、(475.5)は図475.3に引用する規格初版式のパターン2に相当する部分と(IF⇒m, $T_\text{service}$⇒$\tau_\text{SM}$と読み替えることにより)正確に一致します。

規格第2版の式はパターン2がおかしく、SM1の周期的修理性を考慮に入れていません。さらにIFのフォールトの露出時間が$t$から$t+T_\text{service}$となっているため、結果式図475.2は誤っています。
なお、本稿はRAMS 2024に投稿予定のため一部を秘匿していますが、論文公開後の2024年2月頃に開示予定です。
