|
31 |
故障分類 |
故障分類フローチャート
前回説明したPMHFは「アイテムの車両寿命間の平均的な故障率」でしたが、この故障の中身を見ていきます。ISO26262では3重故障以上の故障については安全側故障としています。これはその確率が非常に小さいので省略可能なためです。SPFとDPFの事象は排他であるため、PMHFは(10.4)を用いてSPFのPMHFとDPFのPMHFの和となります(11.1)。ここでSPF(Single Point Failure; 1点故障)とDPF(Dual Point Failure; 2点故障)の定義を故障分類フローチャートに従って理解することが重要です。 $$ M_{PMHF}=M_{PMHF,SPF}+M_{PMHF,DPF}=\frac{1}{T_{lifetime}}\lbrack Q_{SPF}(T_{lifetime})+Q_{DPF}(T_{lifetime})\rbrack\tag{11.1} $$
故障分類フローチャートはISO26262Part5にも掲載されていますが、より詳細なものがPart10に掲載されています。ただ、訳が適切でなかったり、概念的に混同しやすいため、弊社ではこれをリプリントした教材を作成して販売しています(図11.1)。
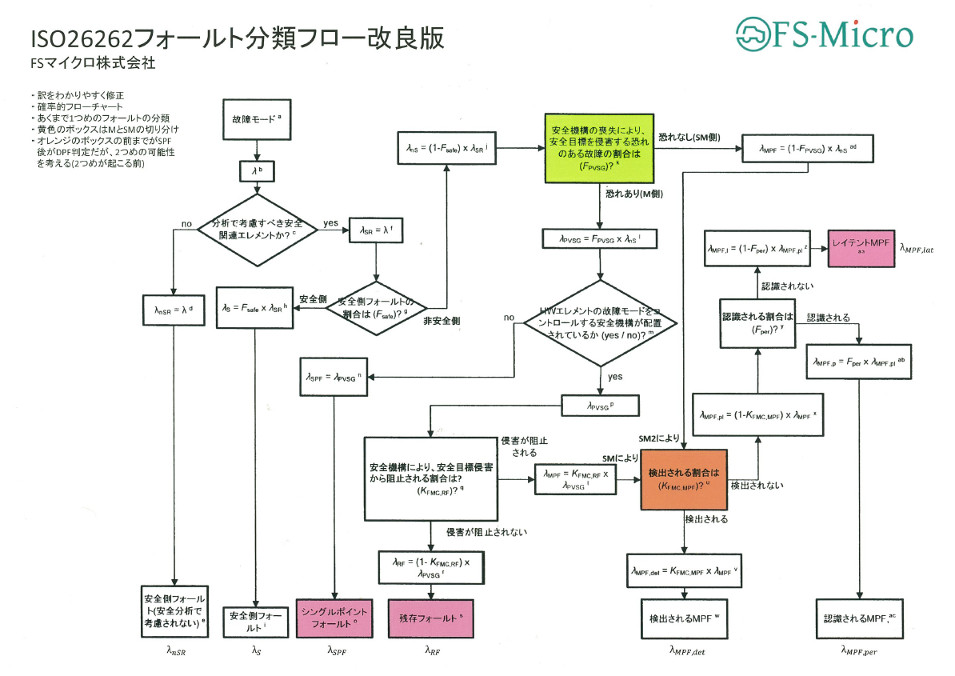
その特長は、
- 訳をわかりやすく修正
- 確率的フローチャートであること
- あくまで1つめの故障分類であること
- 主機能と安全機構の切り分けの明示
等です。故障分類フローチャートで分類された故障率のうち、特にレイテント故障率は以降で大変重要になってくるため、ぜひ理解しておいていただきたいと思います。
SMの種類
ここで、2つのSMの種類に便宜上名前をつけます。規格では特にSM(Safety Mechanism)としか書かれていませんが、SMには明確にその特性の違いがあり、これはPart5またはPart10の故障分類フローチャートで定義されています。
- 1st SM ------- 主機能が安全目標を侵害するのを防止する安全機構(Part1 1.111備考2 a))
- 2nd SM ------ 主機能又は安全機構の故障を検出し、レイテント状態を防止する安全機構(Part1 1.111備考2 b))
規格で明確な名前の区別が無いため、現場では「レイテント状態を防止するSM」等の長い説明を毎回しなければならないためとても不便を感じています。規格で名前を定義してあればよかったのですが。
レイテント状態
規格には特に定義は書かれていませんが、FSマイクロ株式会社では後の理解がしやすくなるため、レイテント(故障)状態を定義しています。
レイテント状態とは、エレメントA(主機能または安全機構)において、関連する1st SMにより安全目標の侵害が阻止されている状態でかつ2nd SMにより故障検出がされない状態を表します。上記故障分類チャートによれば、レイテント状態になるには以下の2つのルートが存在します。
- 主機能が1st SMにより安全目標侵害から阻止されている場合
- 安全機構が故障した場合
いずれのルートもオレンジの判定ボックスに到達し、そこで2nd SMにより故障検出の判定が行われます。故障のうち検出される部分はレイテント状態が解消されます。一方検出されない部分は(ドライバーにより認識されなければ)レイテント状態のままとなります。

Leave a Comment