|
5 |
$M_\text{PMHF}$の計算 (4) |
LAT1⇒DPF2の平均PUDの計算
次にLAT1からDPF2の平均PUDを計算します。時刻$t$でLAT1においてはSM1=upであったのに対し、$t+dt$までの間にSM1にフォールトが起き、DPF2に移行しSM1=downとなります。
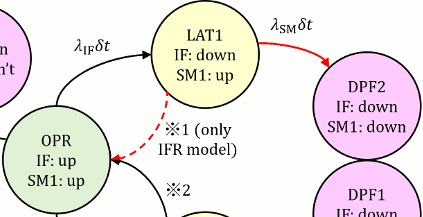
この場合、規格(1st Edition)が曖昧であるため、次の2とおりのケースが考えられます。
- LAT1においては既にIF=downであり、SM1のフォールトに応じて確率的にDPF2に遷移する。これはIFがアンリペアラブルの場合であり、これをIFUモデルと名付けます。図105.1の実線(のみ)の遷移です。
- LAT1においては既にIF=downであり、検出周期内ではSM1のフォールトに応じて確率的にDPF2に遷移する。一方検出周期の最後で、検出されたIFのフォールトは全量(経過時間0で)リペアされ、IF=upとなりOPRに戻る。これはIFがリペアラブルの場合であり、これをIFRモデルと名付けます。図105.1の実線及び破線の遷移です。
1. LAT1のフォールトがDPF2に遷移する場合(IFUモデル)
まずケース1.のIFUモデルを前提として計算すると、条件付き確率の公式より、 $$ \begin{eqnarray} \overline{q_{\mathrm{DPF2,IFU}}}&=&\frac{1}{T_\text{lifetime}}\Pr\{\mathrm{DPF2\ at\ }T_\text{lifetime}\}\\ &=&\frac{1}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}\Pr\{\mathrm{LAT1\ at\ }t\cap\mathrm{SM\ down\ in\ }(t, t+dt)\}\\ &=&\frac{1}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}\Pr\{\mathrm{SM\ down\ in\ }(t, t+dt]\ |\ \mathrm{LAT1\ at\ }t\}\\ & &\ \ \ \ \cdot\Pr\{\mathrm{LAT1\ at\ }t\} \end{eqnarray} \tag{105.1} $$ ここで、$\mathrm{LAT1}$という状態は、IFが不稼働状態にも関わらずVSGを免れており、かつSM1は稼働状態であるから、 $$ \Pr\{\mathrm{LAT1\ at\ }t\}=\Pr\{\mathrm{IF\ down\ at\ }t\cap\text{VSG of IF preventable}\cap\mathrm{SM\ up\ at\ }t\} \tag{105.2} $$ IFとSM1の稼働状態は独立事象であり、IFはアンリペアラブル、SM1はリペアラブルです。SM1のVSG prevent能力はアーキテクチャ的に決定されるため、他の事象とは独立と考え、$K_\text{IF,RF}$(101.3)を用いると、(105.2)は $$ \Pr\{\mathrm{LAT1\ at\ }t\}=\Pr\{\mathrm{IF^U\ down\ at\ }t\}\Pr\{\text{VSG of IF preventable}\}\Pr\{\mathrm{SM\ up\ at\ }t\}\\ =K_{\mathrm{IF,RF}}F_{\mathrm{IF}}(t)A_{\mathrm{SM}}(t)\tag{105.3} $$ と書けます。
さらに、(105.1)の右辺積分中の条件付き確率式に(105.2)、独立条件付き確率式(103.4)、及び微小故障条件付き確率式(66.8)を用れば、 $$ \require{cancel} \Pr\{\mathrm{SM\ down\ in\ }(t, t+dt]\ |\ \mathrm{LAT1\ at\ }t\}\\ =\Pr\{\mathrm{SM\ down\ in\ }(t, t+dt]\ |\ \mathrm{SM\ up\ at\ }t\cap\bcancel{\mathrm{IF^U\ down\ at\ }t}\cap\bcancel{\text{VSG of IF preventable}}\}\\ =\Pr\{\mathrm{SM\ down\ in\ }(t, t+dt]\ |\ \mathrm{SM\ up\ at\ }t\}=\lambda_{\mathrm{SM}}dt \tag{105.4} $$ よって、(105.1)に(105.4)、(105.3)を用いた上で、稼働度PA(59.7)、故障率(66.6)及び弊社積分公式を用いれば、 $$ \begin{eqnarray} \overline{q_{\mathrm{DPF2, IFU}}}&=&\frac{1} {T_\text{lifetime}}\int_0^{T_\text{lifetime}}K_{\mathrm{IF,RF}}F_{\mathrm{IF}}(t)A_{\mathrm{SM}}(t)\lambda_{\mathrm{SM}}dt\\ &=&\frac{K_{\mathrm{IF,RF}}}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}F_{\mathrm{IF}}(t)[(1-K_{\mathrm{SM,MPF}})R_{\mathrm{SM}}(t)+K_{\mathrm{SM,MPF}}R_{\mathrm{SM}}(u)]\lambda_{\mathrm{SM}}dt,\\ & &ただし、u:=t\bmod\tau\\ &=&\frac{K_{\mathrm{IF,RF}}}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}F_{\mathrm{IF}}(t)[(1-K_{\mathrm{SM,MPF}})f_{\mathrm{SM}}(t)+K_{\mathrm{SM,MPF}}f_{\mathrm{SM}}(u)]dt\\ &\approx&\frac{K_{\mathrm{IF,RF}}}{2}\lambda_{\mathrm{IF}}\lambda_{\mathrm{SM}}[(1-K_{\mathrm{SM,MPF}})T_\text{lifetime}+K_{\mathrm{SM,MPF}}\tau]\\ &=&K_{\text{IF,RF}}\alpha,\\ & &ただし、\alpha:=\frac{1}{2}\lambda_{\mathrm{IF}}\lambda_{\mathrm{SM}}[(1-K_{\mathrm{SM,MPF}})T_\text{lifetime}+K_{\mathrm{SM,MPF}}\tau] \end{eqnarray} \tag{105.5} $$
ここで、$(1-K_{\mathrm{SM,MPF}})T_\text{lifetime}\gg K_{\mathrm{SM,MPF}}\tau$の場合に$M_{\mathrm{PMHF}}=\overline{q_{\mathrm{SPF,IFU}}}+\overline{q_{\mathrm{DPF1,IFU}}}+\overline{q_{\mathrm{DPF2, IFU}}}$を計算すると、 $$ M_{\mathrm{PMHF}}= (1-K_{\mathrm{IF,RF}})\lambda_{\mathrm{IF}}+ K_{\mathrm{IF,RF}}\lambda_{\mathrm{IF}}\lambda_{\mathrm{SM}}(1-K_{\mathrm{SM,MPF}})T_\text{lifetime}\\ \tag{105.6} $$ であり、さらにこれは、 $$ \begin{cases} \begin{eqnarray} \lambda_{\mathrm{IF,RF}}&:=&(1-K_{\mathrm{IF,RF}})\lambda_{\mathrm{IF}}\\ \lambda_{\mathrm{IF,DPF}}&:=&K_{\mathrm{IF,RF}}\lambda_{\mathrm{IF}}\\ \lambda_{\mathrm{SM,DPF,lat}}&:=&(1-K_{\mathrm{SM,MPF}})\lambda_{\mathrm{SM}} \end{eqnarray} \tag{105.7} \end{cases} $$ を用いて $$ (105.6)=\lambda_{\mathrm{IF,RF}}+\lambda_{\mathrm{IF,DPF}}\lambda_{\mathrm{SM,DPF,lat}}T_\text{lifetime}\tag{105.8} $$ と書きなおせるため、(105.8)は次の図105.2に示す、ISO 26262 1st edition Part 10の第3式に(IF⇒Mと読み替えることにより))完全に一致します。

この式は「故障順序によらない」PMHF式ということですが、「故障順序によらない」とは、「故障の順番がIF⇒SMまたはその反対のSM⇒IFの両方の場合」$\dagger$という意味です。1st editionの第3式に一致したということは、1st SMによりVSG抑止されたフォールトは全てレイテントフォールトになるのが規格の前提であると推測されます。
しかしながら、この前提はLFMにおいてdetected faultが算入されないという点で、規格内部での不一貫性を示しています。
RAMS 2020においてPMHF式の論文発表が終了したため、本記事を開示します。さらに、上記不一貫性の解消を目的とした新提案の論文をRAMS 2022に投稿し、これも採択されました。
$\dagger$連続確率過程の確率密度の観点からはIFとSMの同時故障の確率は”ほとんど確実に"0です。従って、この条件は全ての場合を表します。

Leave a Comment