|
1 |
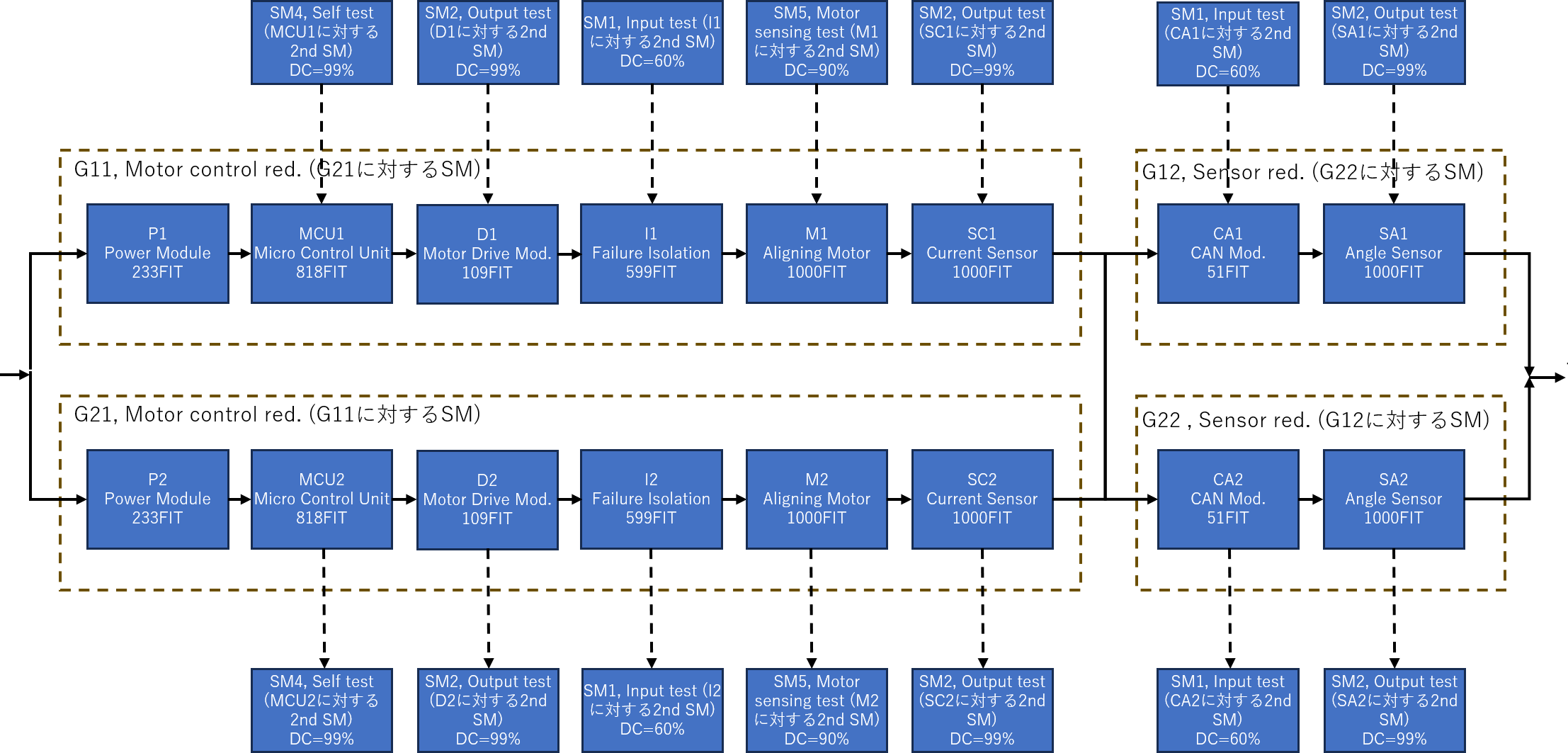
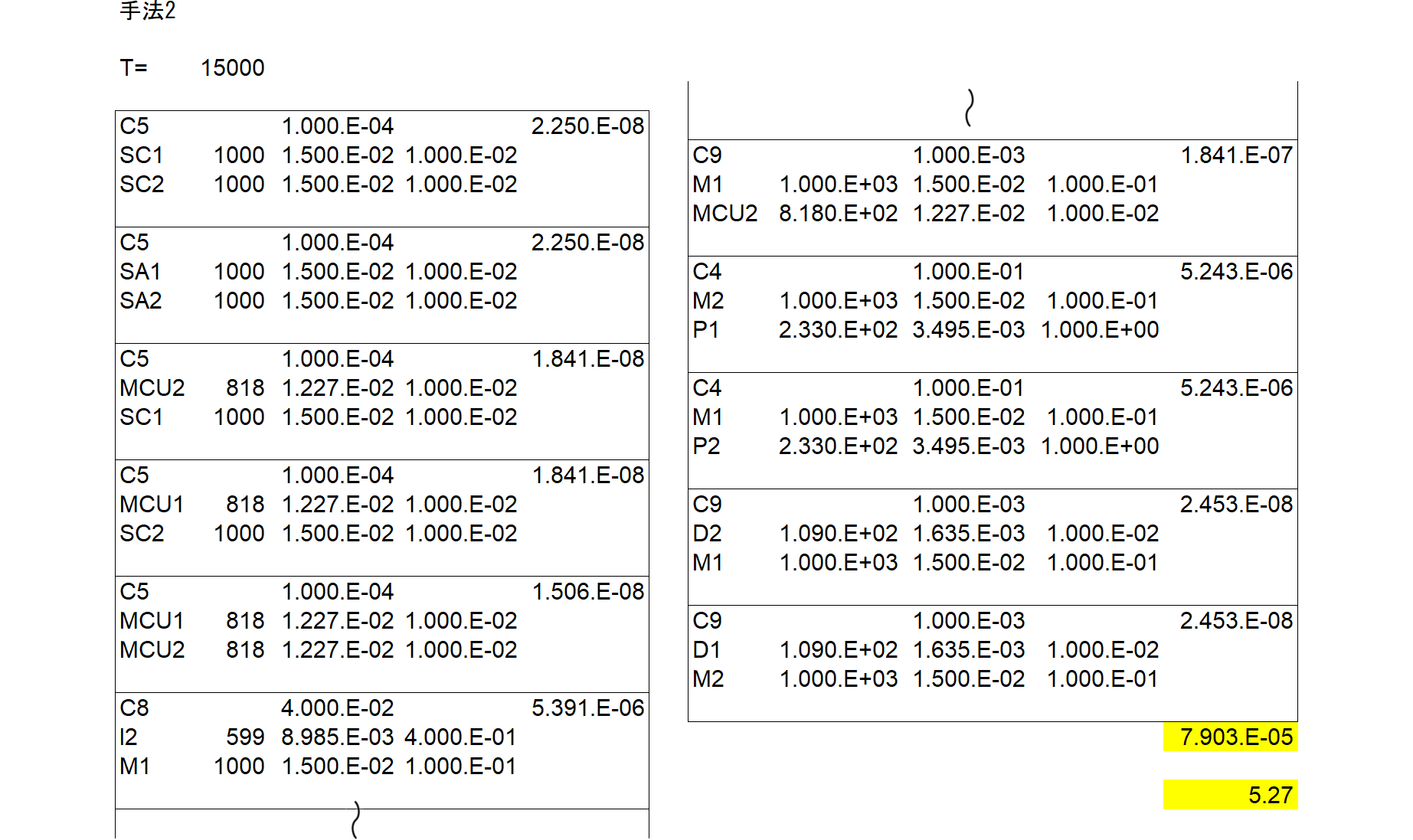
Fault treeの自動生成 (9) |
Posts Tagged with "PMHF"
既に発行済みのブログであっても適宜修正・追加することがあります。We may make changes and additions to blogs already published.
ページ:
|
1 |
Fault treeの自動生成 (9) |
