ISO 26262のコンサルティング会社が提供するPMHF式の解説動画を見つけたので見ていきます。ほとんどの論文が無視する中で、珍しくこの動画はPart 10に掲載されているPMHF式(下図738.1)をリスペクトしており、
 図738.1 2nd edition規格式(引用)SF2
図738.1 2nd edition規格式(引用)SF2
その解説を行っています。そこまでは良かったのですが、以下の画面に誤りがあります。
 図777.1 PMHFの解説動画
図777.1 PMHFの解説動画
英文のトランスクリプトを入手したので、画面と合わせて見てみましょう。以下はDeepLによるその翻訳です。
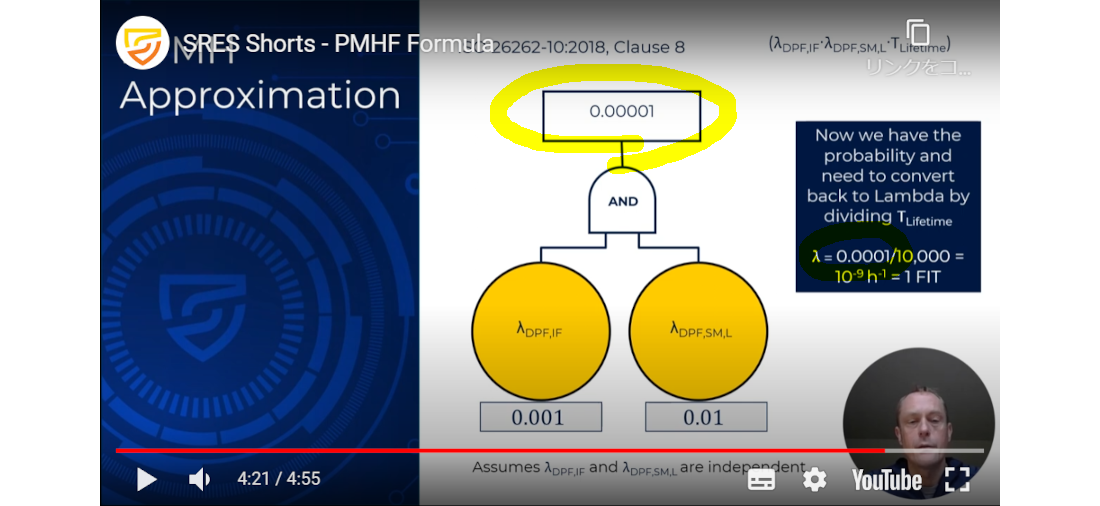
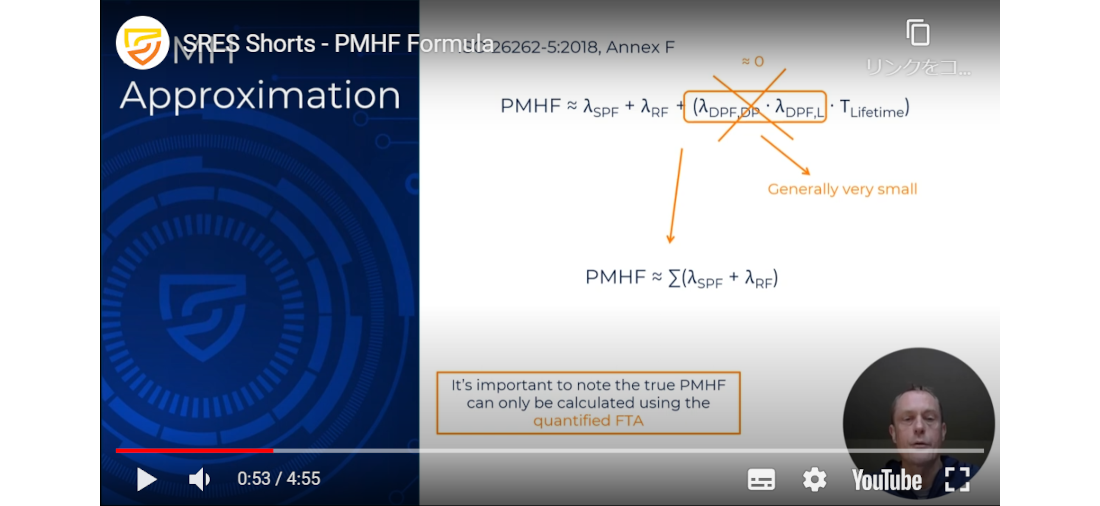
さて、この式を計算しようとすると、いくつかの問題にぶつかる。そこでまず我々は、1番目の欠陥に残留欠陥を加えると、この式の冒頭、1時間あたりの故障に1時間あたりの故障を加えたものになることを示したい。これは問題ない。これでいいのだ。そして、これが我々が求める実際の単位である。PMHFは1時間当たりの故障数である。
ここはちょうど画面(図777.1)上部の下記の式
$$
\frac{Failures}{hour}+\frac{Failures}{hour}
$$
を意味します。これは(次元が合っているので)問題ないと言っています。ところが、
しかし、他の表現を見てみよう。1時間当たりの故障数×1時間当たりの故障数×1時間当たりの故障数×1時間当たりの故障数の2乗である。これは数学的に意味をなさない。これは規格ではあまり扱われていない。
画面下部の下記の式に移り、
$$
\frac{Failures}{hour}\times\frac{Failures}{hour}\times hour=\frac{Failures^2}{hour}\ ??
$$
このMPFの式とSPFの式の次元が合わないという主張です。これは解説動画の誤りであり、故障率の次元は動画で言う
$$
\frac{Failures}{hour}
$$
ではなく、
$$
\frac{1}{hour}
$$
というだけのことです。従って規格にはなんら問題はありません。
故障数は1個、2個と数える無次元数です。従ってPMHFを構成するSPFもMPFも単位は故障率の次元と同じく$h^{-1}$となり加算することができます。この後の解説でFTAでは故障率の単位を$h^{-1}$と自ら言っているので、不整合に気付いても良さそうなのですが。PMHFが故障率の次元と同じであることを理解していないのかもしれません。
このように、専門家といえども誤りはあるので、「主語で語らない」$\dagger$ようにしましょう。
$\dagger$「主語で語る」というのは、「誰々さんが言ったから」「〇〇教授が言ったから」等と、無批判に主語の権威付けを利用して自説を正当化する行為
 前のブログ
次のブログ
前のブログ
次のブログ