主機能M及び安全機構SMのペアについて、マルコフ状態遷移図を書いていきます。
まず、Mはアンリペアラブルであることを前提とし、SMはリペアラブルであることを前提とします。
しかし、MがフォールトしてもSMがそれをVSG(安全目標侵害)抑止している場合には、次のSMのフォールトは直ちにSG侵害となるため、一旦Mがフォールトとなった時点でSMはアンリペアラブルとなります。
まず、時刻$t$において、$\lbrace \mathrm{OPR:\ M\ up\ at\ }t\cap \mathrm{SM\ up\ at\ }t\rbrace$,
$\lbrace \mathrm{SPF:\ M\ down\ at\ }t\cap\mathrm{VSG\ of\ M\ not\ preventable}\cap\mathrm{SM\ up\ at\ }t\rbrace$,
$\lbrace \mathrm{LAT1:\ M\ down\ at\ }t\cap\mathrm{VSG\ of\ M\ preventable}\cap\mathrm{SM\ up\ at\ }t\rbrace$,
$\lbrace \mathrm{LAT2:\ M\ up\ at\ }t\cap\mathrm{SM\ down\ at\ }t\rbrace$,
$\lbrace \mathrm{DPF:\ M\ down\ at\ }t\cap\mathrm{SM\ down\ at\ }t\rbrace$,の5状態があり、$t$から$t+dt$までの微小時間$dt$の間に遷移する微小確率PUDを求めます。
図のほうがわかりやすいので、以下にマルコフ状態遷移図を示します。
 図62.1 M/SMモデルのマルコフ状態遷移図
図62.1 M/SMモデルのマルコフ状態遷移図
マルコフ状態遷移図でのOPR→SPF
図より微小不稼働確率をPUDで表すと、
$$
q_{M,SPF}(t)dt=\Pr\{\mathrm{OPR\ at\ }t\cap\mathrm{M\ down\ in\ }(t, t+dt]\cap\mathrm{VSG\ of\ M\ not\ preventable}\} \\
=\Pr\{\mathrm{M\ up\ at\ }t\cap\text{SM up at }t\cap\mathrm{M\ down\ in\ }(t, t+dt]\cap\mathrm{VSG\ of\ M\ not\ preventable}\} \\
=\Pr\{\mathrm{VSG\ of\ M\ not\ preventable}\}\Pr\{\mathrm{M\ fails\ in}(t, t+dt]\ |\ \mathrm{M\ up\ at\ }t\}\Pr\{\mathrm{M\ up\ at\ }t\}\Pr\{\text{SM up at }t\}\\
=(1-K_{M,FMC,RF})A_{SM}(t)R_{M}(t)\lambda_{M}dt=(1-K_{M,FMC,RF})A_{SM}(t)f_{M}(t)dt\tag{62.1}
$$
マルコフ状態遷移図でのLAT2→DPF
図より微小不稼働確率をPUDで表すと、
$$
q_{M,DPF}(t)dt=\Pr\{\mathrm{LAT2\ at\ }t\cap\mathrm{M\ down\ in\ }(t, t+dt]\}\\
=\Pr\{\mathrm{SM\ down\ at\ }t\cap\mathrm{M\ up\ at\ }t\cap\mathrm{M\ down\ in\ }(t, t+dt]\}\\
=\Pr\{\mathrm{SM\ down\ at\ }t\rbrace\Pr\{\mathrm{M\ fails\ in}(t, t+dt]\ |\ \mathrm{M\ up\ at\ }t\}\Pr\{\mathrm{M\ up\ at\ }t\}\\
=Q_{SM}(t)R_{M}(t)\lambda_{M}dt=Q_{SM}(t)f_{M}(t)dt\tag{62.2}
$$
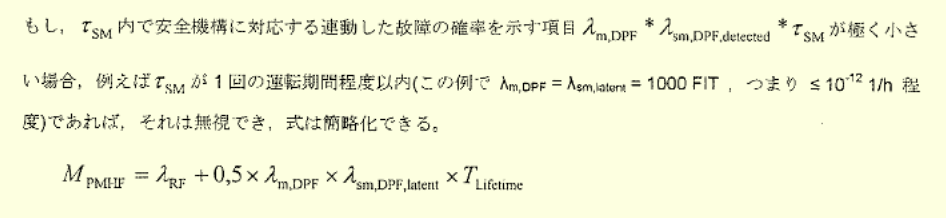
主機能フォールトによるVSG
以上から(62.1)と(62.2)を加えれば、MによりSPFもしくはDPFとなる場合の微小遷移確率が求められ、
$$
q_{M}(t)dt=q_{M,SPF}(t)dt+q_{M,DPF}(t)dt=\left[1-K_{M,FMC,RF}A_{SM}(t)\right]f_{M}(t)dt\\
=\img[-1.35em]{/images/withinseminar.png} ただしu\equiv t\bmod\tau_{SM}\tag{62.3}$$
となります。
 前のブログ
次のブログ
前のブログ
次のブログ