|
25 |
Annex H レイテントフォールトの取り扱い |
意図
Annex Hが新設された意図は、Part5 8.4.8でLFMの目標値の設定方法を3種あげていますが、その実例を示すものです。例えば8.4.8のa)は、「8.4.6に記述される"レイテントフォールトメトリック”の目標値を満足する」とありますが、Annex Hでは例を通じてその計算を行っています。
以下に1st SMの故障抑止能力(DC)が故障検出に基づくものと、故障抑止に基づくものの2パターンの例を挙げています。
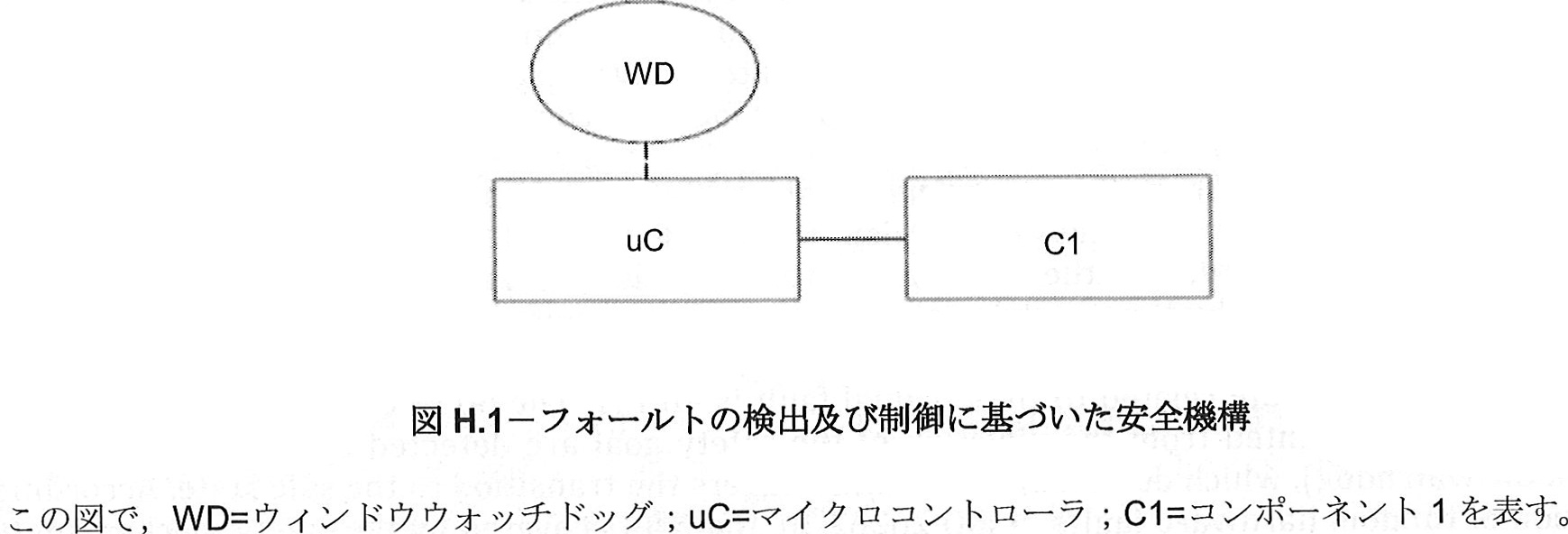
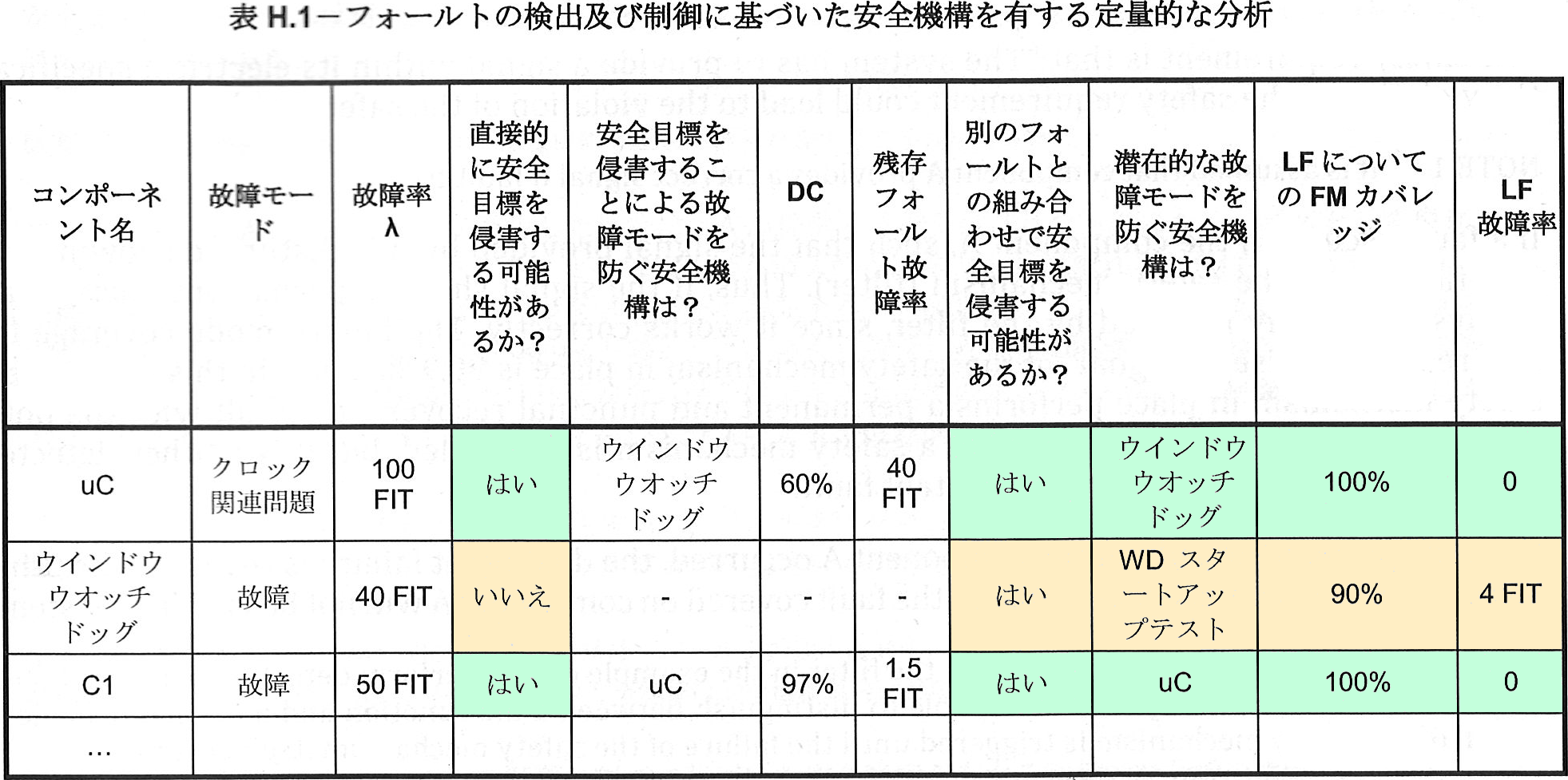
第1例
故障検出に基づくフォールトは、検出されるからVSG抑止されるのであってその逆ではありません。ということは、抑止された分の検出割合は常に100%です。これは2nd SMとしての検出率が100%であることを意味し、図117.2でも示すように、グリーンで示した主機能のレイテントフォールトはゼロであることを意味します。 一方、SM(1st SM)のフォールトはSG侵害しないため、2nd SMの検出率により、検出から漏れた部分がレイテントフォールトとなります。
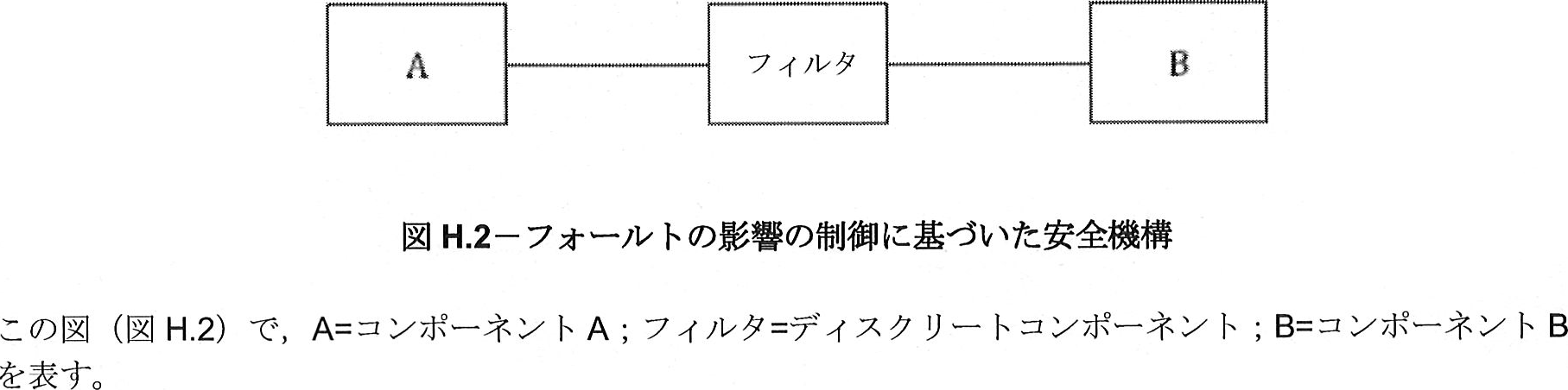
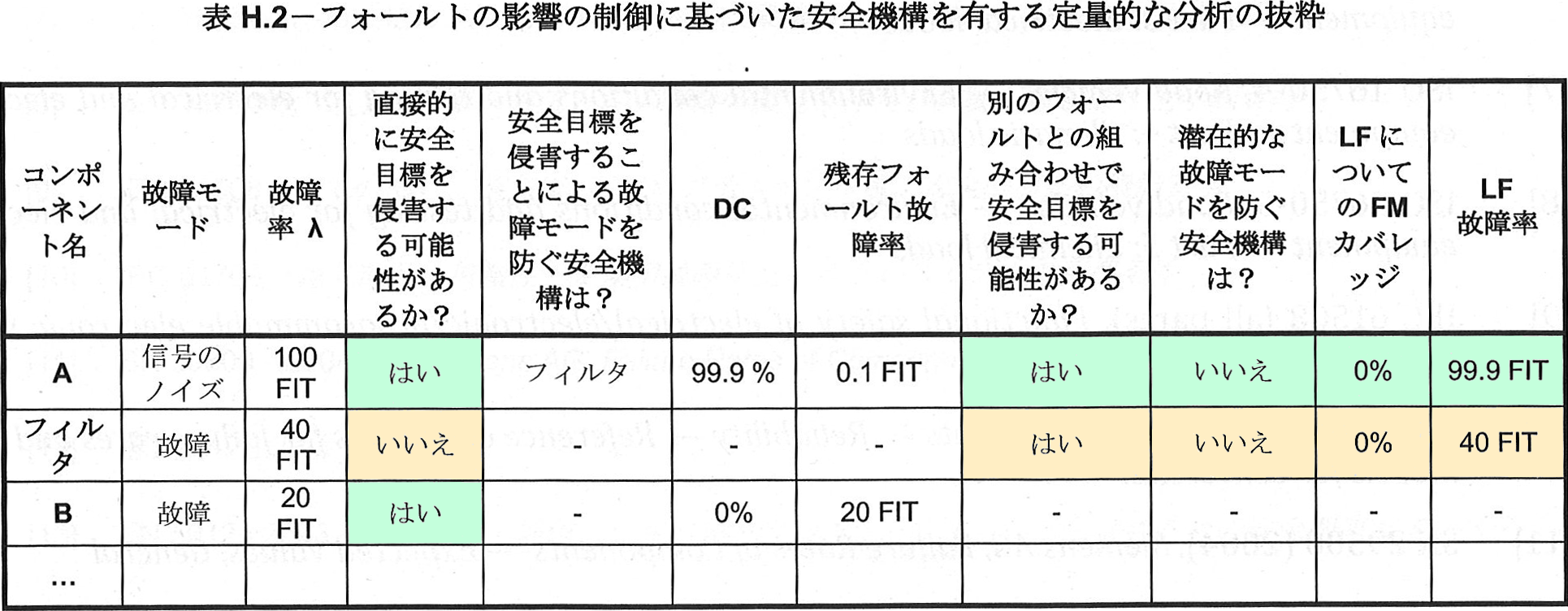
第2例
一方、SG侵害抑止に基づき、検出を行わない1st SMも存在し、その例を示しています。この場合、故障抑止はするものの、故障検出はゼロとなり、抑止されたものが全量レイテントフォールトとなります。 同じく、SM(1st SM)のフォールトはSG侵害しないため、2nd SMの検出率により、検出から漏れた部分がレイテントフォールトとなります。