|
26 |
新方式によるPUAの導出 (10) |
続きです。ChatGPTの出力を見やすく加工(キャンセル等)・修正しています。
次に、シグマの部分の式を解析的に簡約化し整理します。
$$ \require{cancel} \sum_{i=1}^{n} \left[ F(i\tau) - F\left( (i - 1)\tau \right) \right] \cdot R(t - i\tau) =\sum_{i=1}^{n} \left[ \bcancel{1}- R(i\tau) - \bcancel{1} +R\left( (i-1)\tau \right) \right] R(t - i\tau) $$
シグマ内の項を$R(t)$のメモリーレス性及び分配則を用いて展開します。
$$ R\left( (i-1)\tau \right) R(t - i\tau) - R(i\tau) R(t - i\tau)\\ = R\left((\bcancel{i}-1)\tau + t - \bcancel{i\tau} \right) - R\left(\bcancel{i\tau} + (t - \bcancel{i\tau}) \right)= R(t - \tau) - R(t) $$
シグマを展開すると、カッコ内は$i$には依存しないため$n$倍となります。
$$ \sum_{i=1}^{n} \left[ R\left( (i-1)\tau \right) - R(i\tau) \right] R(t - i\tau) = n R(t - \tau) - n R(t) $$
以上より、元のシグマの式は以下のように整理されます。
$$ A(t) = R(t) + K_{\text{MPF}}\sum_{i=1}^{n} \left[ F(i\tau) - F\left( (i - 1)\tau \right) \right] \cdot R(t - i\tau)= R(t) + nK_{\text{MPF}} \left[ R(t - \tau) - R(t) \right] $$
よって、$Q_\text{approx2}(t)$は、 $$ Q_\text{approx2}(t)= F(t) - n K_{\text{MPF}} \left[ F(t) - F(t - \tau) \right] $$
となります。
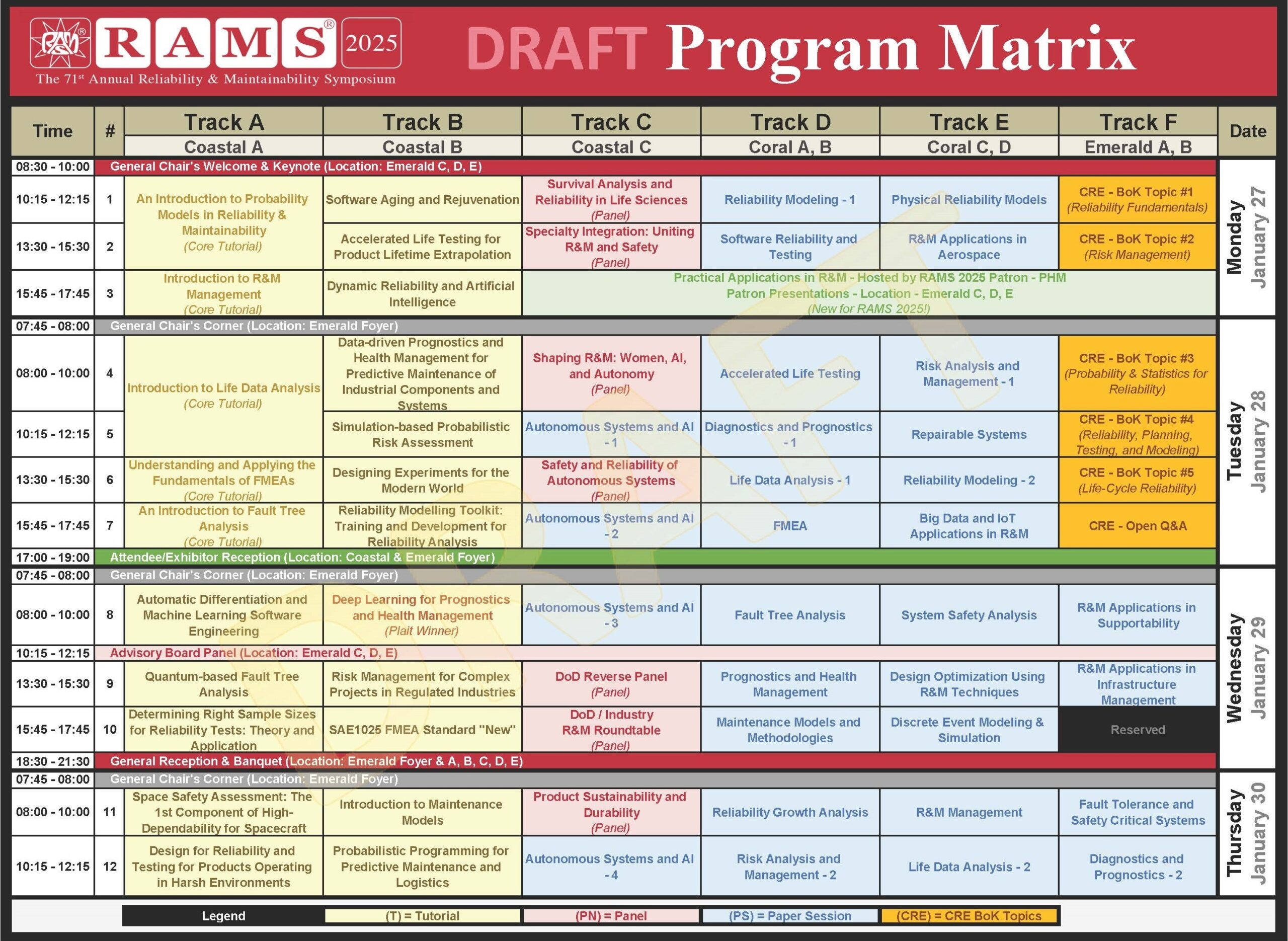
なお、本稿はRAMS 2025に投稿予定のため一部を秘匿しています。