|
10 |
MPF detectedの別の考え方 |
MPF detectedは謎のフォールトと言えます。定義としては単純で、1st SMにより検出され、VSGから抑止されたフォールトです。抑止されなければVSGの可能性があるということは、IFのフォールトであることを意味します。
この単純なフォールトがなぜ謎なのかと言えば、MPF detectedが検出された後の対処が規格に書かれていないためです。他のフォールトとの組み合わせでVSGとなるようなDPFについては、2nd SMにより検出されLFになるのを抑止される場合には修理されることが書かれています。
そのため、MPF detectedが検出された後の対処は修理されるかされないかの2つの可能性が存在します。まず自然な解釈として、そのまま放置される解釈があります。
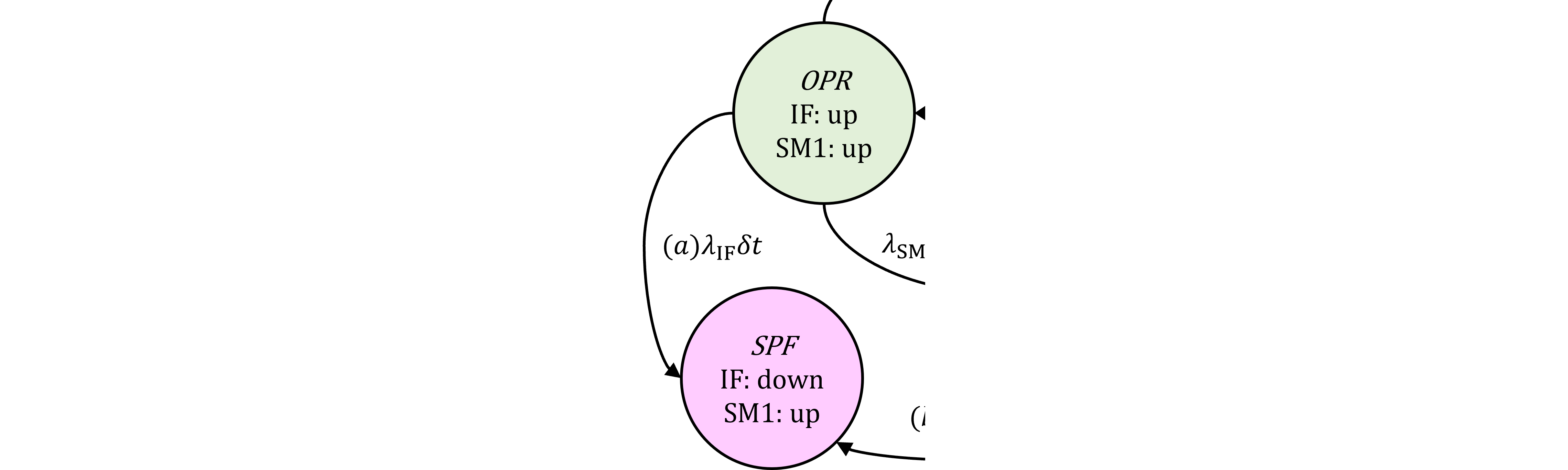
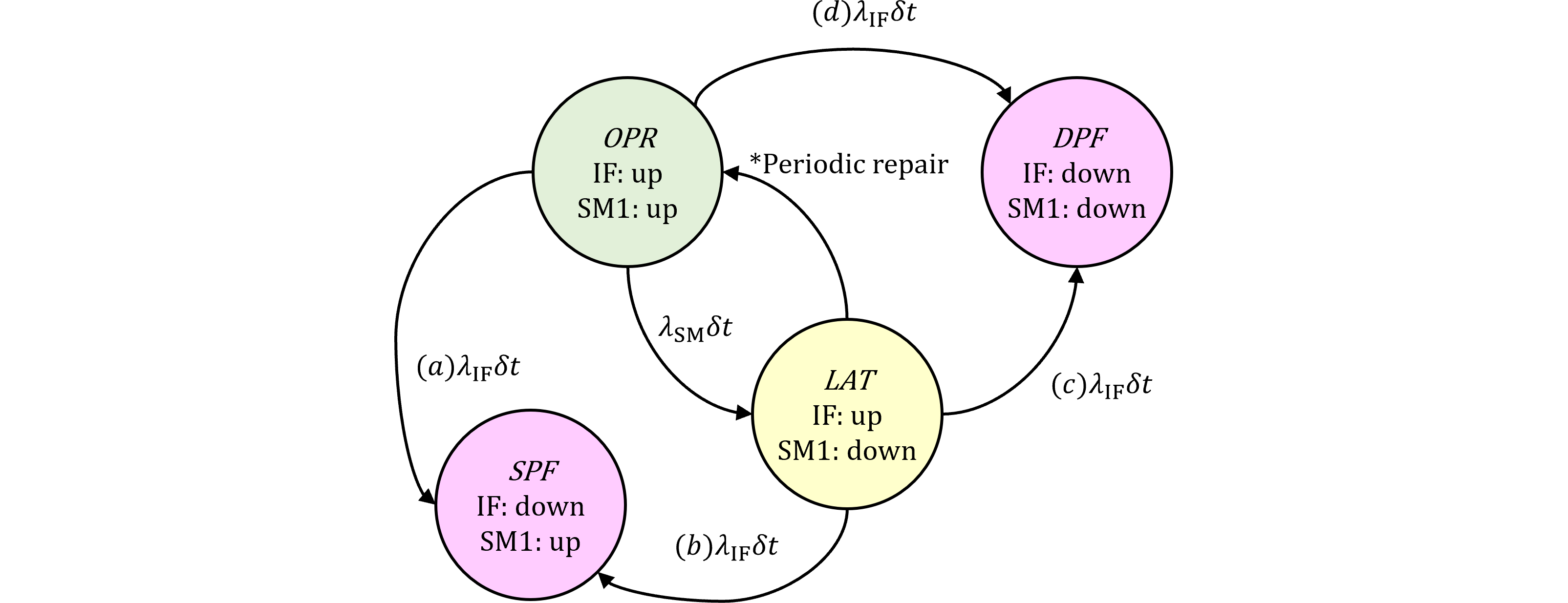
修理されなければ通常はそのまま放置され、しかるべき時間の後に他のフォールトとの組み合わせによりDPFとなります。これはLFとなることを意味します。式で書けば、 $$\Pr(\text{VSG})=\Pr(\text{SPF})+\Pr(\text{DPF,latent})+\Pr(\text{DPF,detected})$$ この考えに基づきPMHF計算を実施したものが、論文[1]です。これには問題があり、LFMの定義式を見てもMPF detectedはMPF latentとは区別されているので、LFMの定義と不一致となります。
修理されればそれは再び運転可能となります。従って、 $$\Pr(\text{VSG})=\Pr(\text{SPF})+\Pr(\text{DPF,latent})$$ この考えに基づきPMHF計算を実施したものが、論文[2]です。この考えではLFMとは矛盾しませんが、車に修理者が乗車しており、いかなる時点での故障も直ちに修理する必要があります。論文[2]は、この点をプロージブル(もっともらしい)なシナリオを考えて解決したものです。
さらに別の考え方として、修理はされないがDPFにならないとする考え方もあります。具体的には、修理はされないが、運用を停止する等です。この場合は運用が継続されないので、確率としては分母から引く必要があります。 $$\Pr(\text{VSG})=\frac{\Pr(\text{SPF})+\Pr(\text{DPF,latent})}{1-\Pr(\text{DPF,detected})}\\ \approx(\Pr(\text{SPF})+\Pr(\text{DPF,latent}))(1+\Pr(\text{DPF,detected}))\\ \approx\Pr(\text{SPF})+\Pr(\text{DPF,latent})$$ 確率の2乗は非常に小さくなるため、近似をとれば2.と変わりません。
- https://ieeexplore.ieee.org/document/9153704
- RAMS 2022投稿論文、未発表