|
25 |
弊社代表 桜井 厚の論文がIEEE信頼性学会(RAMS)に4年連続採択 |

機能安全(注1)コンサルティングを提供するFSマイクロ株式会社(本社:名古屋市)代表取締役社長 桜井 厚の論文が、2022年10月22日、IEEE(注2)主催の信頼性に関する国際学会であるRAMS 2023(注3)に正式採択されました。同著者の論文がRAMSに採択されるのは4年連続となります。また同著者は、2017年にIEEE主催の国際学会である第14回ISPCE 2017(注4)において、最優秀論文賞を受賞しています。
RAMS 2023は、2023年1月23日から26日まで米国フロリダ州オーランドのフロリダホテルアンドカンファレンスセンターにて開催される予定です。

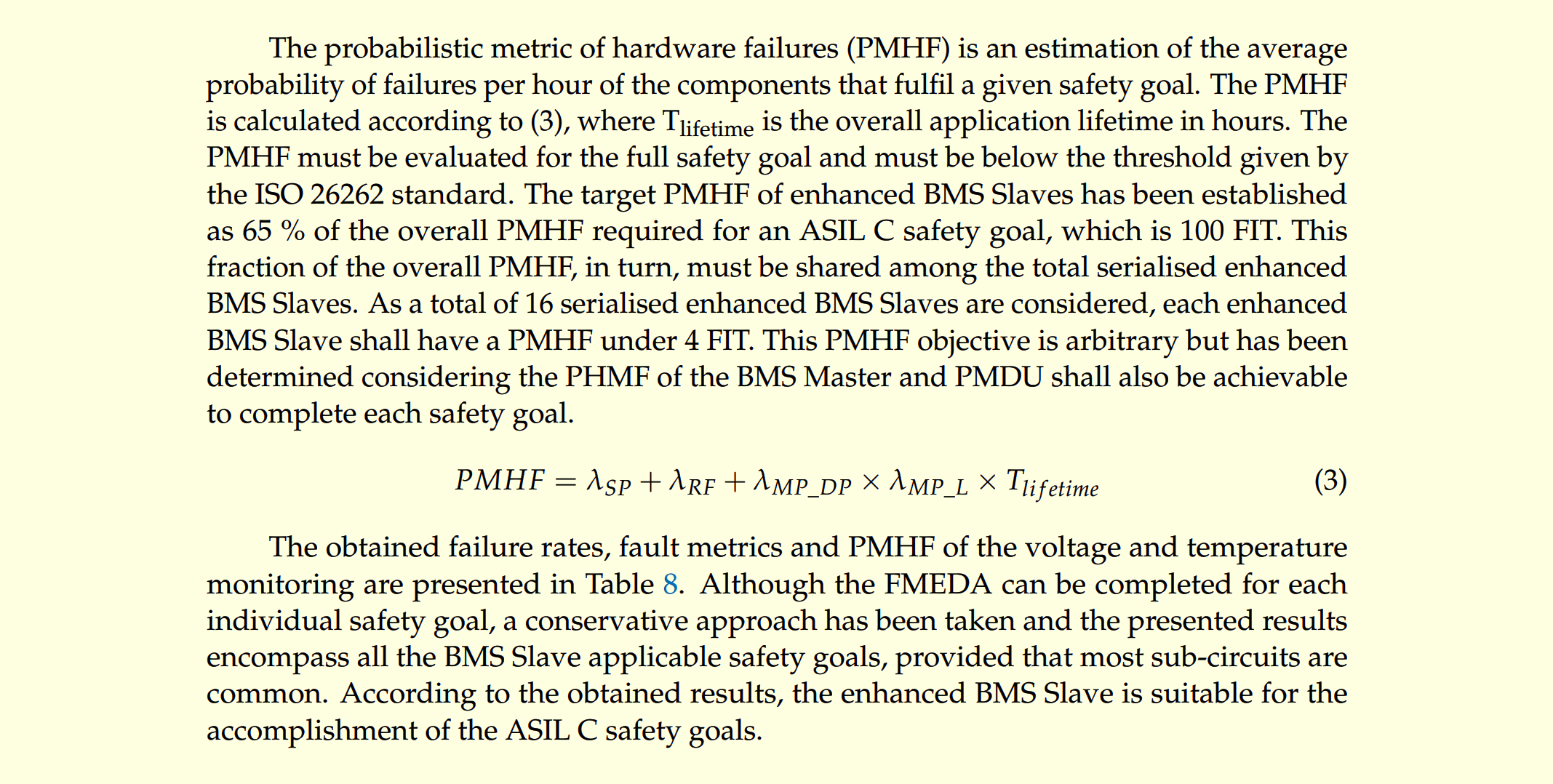
2018年に車載電子機器における機能安全の国際規格であるISO 26262(注5)第2版が発行され、併せてPMHF(注6)式も改訂されました。同著者はRAMS 2020において、このPMHF式の数学的な背景を明らかにし、最適値が算出可能な新しいPMHF式を提案しました。
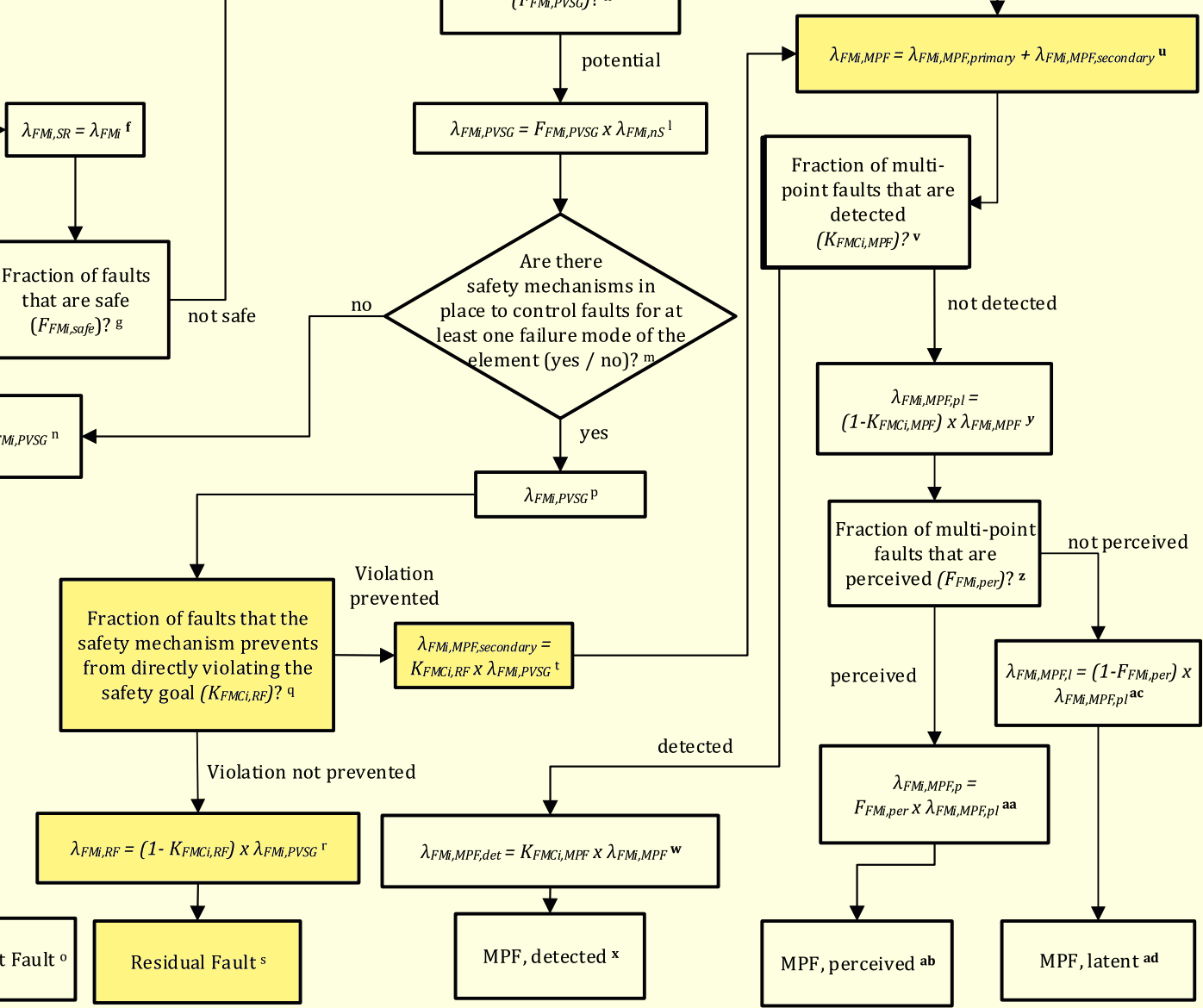
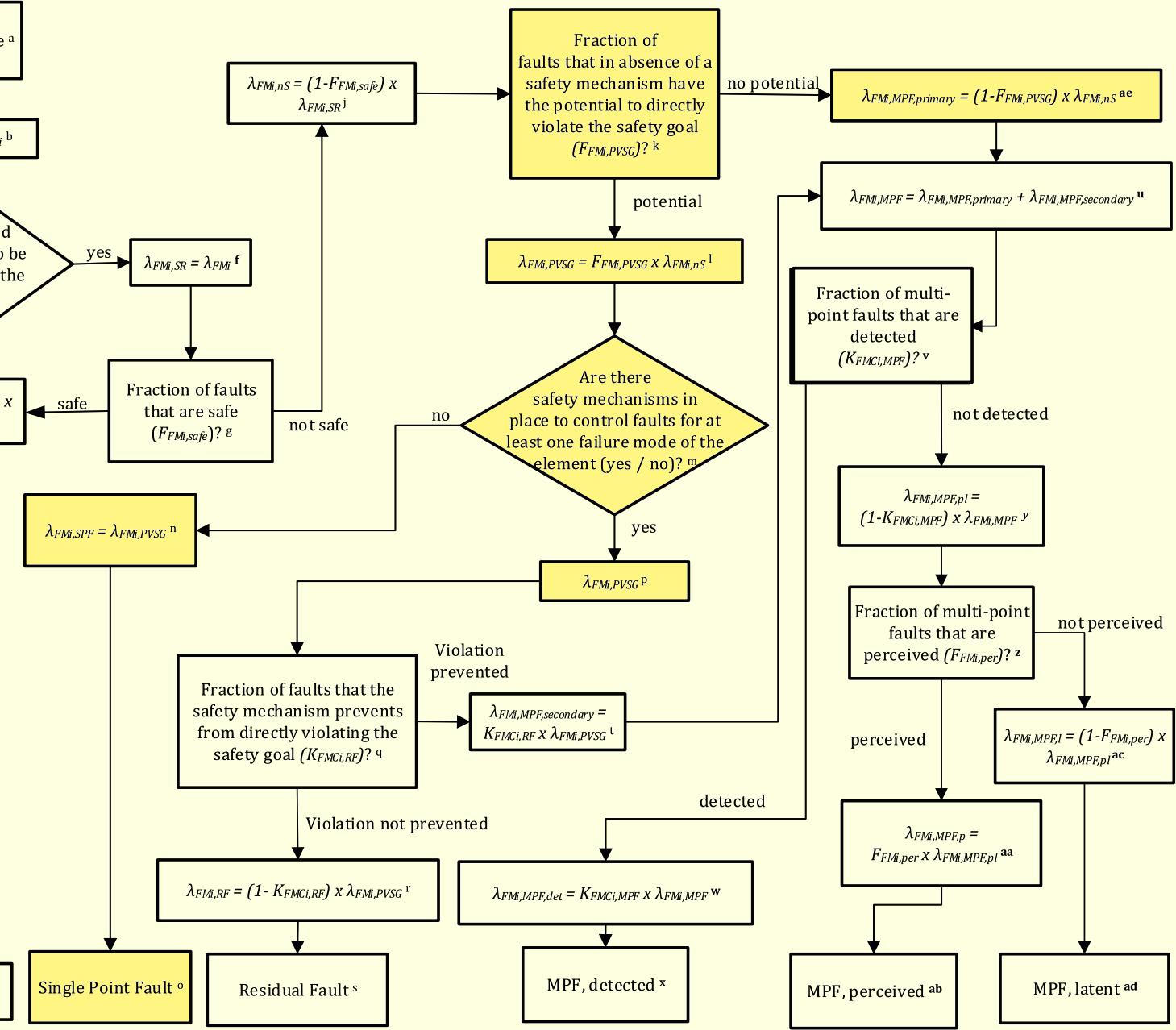
本論文は、新提案の確率的構成要素を用いることで、同著者の提唱するPMHF式を再度証明したものです。具体的には主機能と安全機構の合体エレメントを考えることで、ISO26262第1版におけるPMHF式を確率的構成要素に分解し、主機能と安全機構が修復可能な場合におけるPMHF式となることを証明しました。そのため、従来見られたPMHFの過剰見積りを防止することが可能となります。これにより、自動運転システムに代表される耐故障システム(注7)の設計工数の削減と市場投入期間の短縮が期待されます。
【お問い合わせ先】
商号 FSマイクロ株式会社
代表者 桜井 厚
設立年月日 2013年8月21日
資本金 3,200万円
事業内容 ISO 26262車載電子機器の機能安全のコンサルティング及びセミナー
本店所在地 〒460-0011
愛知県名古屋市中区大須4-1-57
電話 052-263-3099
メールアドレス info@fs-micro.com
URL http://fs-micro.com/
【注釈】
注1:機能安全は、様々な安全方策を講じることにより、システムレベルでの安全性を高める考え方
注2:IEEE(アイトリプルイー)はInstitute of Electrical and Electronics Engineersの略称。電気工学・電子工学技術に関する、参加人数、参加国とも世界最大規模の学会 http://ieee.org/
注3:RAMS(ラムズ)2023はThe 69th Annual Reliability & Maintainability Symposiumの略称。IEEE信頼性部会が主催する、信頼性工学に関する国際学会 http://rams.org/
注4:ISPCE(アイスパイス)はIEEE Symposium on Product Compliance Engineeringの略称。IEEE製品安全部会が主催する、製品安全に関する国際学会 http://2017.psessymposium.org/
注5:ISO 26262とは車載電気・電子システムに関する機能安全規格であり、自動車の運行中に車載電気・電子システムの故障により危険な事象が起きる可能性を、許容できる範囲にまで減少させることを目的とした国際規格
注6:PMHF(ピーエムエイチエフ)はProbabilistic Metric for Random Hardware Failuresの略称。車載電気・電子システムにおいて、車両寿命間にシステムが不稼働となる確率を時間平均した、ISO 26262のハードウェアに関する設計目標値のひとつ
注7:耐故障システムとは、故障した場合に直ちに機能を失うことなく、本来の機能を代替可能な安全性向上のためのシステム