|
6 |
Fault treeの自動生成 (26) |
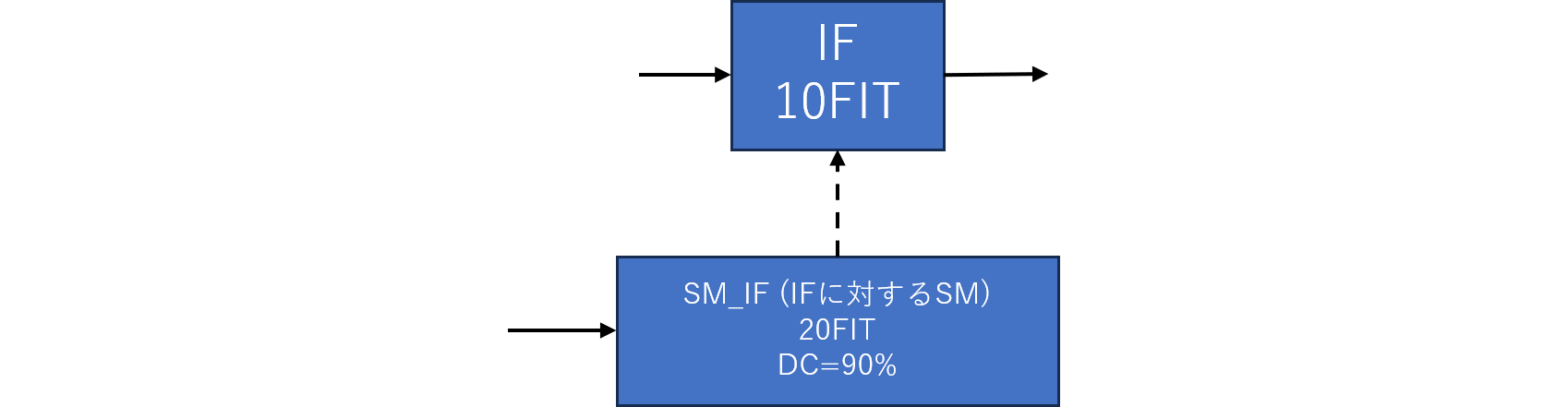
ChatGPTに前稿のRBDを読ませたところ、次のMARDを取得しました。 TEST.BED ~TEST.FTDの3ファイルは同一なので省略します。
TEST.FTL
*Saphire 8.2.9
TEST, TOP =
TOP AND IF_FAIL SM_FAIL
IF_FAIL OR APS_SENSOR TPS_SENSOR FCAN_LINE MAIN_MCU MOTOR_DRV MOTOR THROTTLE
SM_FAIL OR COV_REM SM_PATH
SM_PATH AND COV_90 SM_EXPAND
SM_EXPAND OR DETECT_FAIL CONTROL_FAIL
DETECT_FAIL AND LANE_APS LANE_TPS LANE_DIAG LANE_SUB
LANE_APS OR APS_SENSOR MAIN_MCU
LANE_TPS OR TPS_SENSOR MAIN_MCU
LANE_DIAG OR DRIVER_DIAG MAIN_MCU
LANE_SUB OR SUB_MCU
CONTROL_FAIL OR BLOCK_PAR RELAY_DRV RELAY
BLOCK_PAR AND MAIN_MCU SUB_MCU
TEST.GTD
*Saphire 8.2.9
TEST=
* Name , Description, Project
TOP , TEST , ,TEST
IF_FAIL , IF fail , ,TEST
SM_FAIL , SM fail , ,TEST
SM_PATH , SM coverage path , ,TEST
SM_EXPAND , SM expanded , ,TEST
DETECT_FAIL , detection fail , ,TEST
LANE_APS , lane APS , ,TEST
LANE_TPS , lane TPS , ,TEST
LANE_DIAG , lane DIAG , ,TEST
LANE_SUB , lane SUB , ,TEST
CONTROL_FAIL , control fail , ,TEST
BLOCK_PAR , parallel block , ,TEST
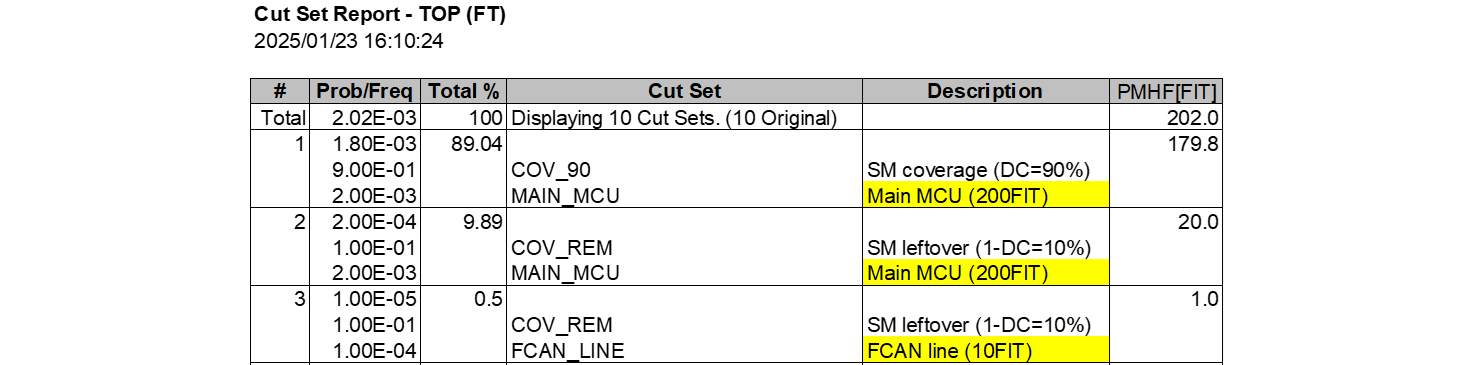
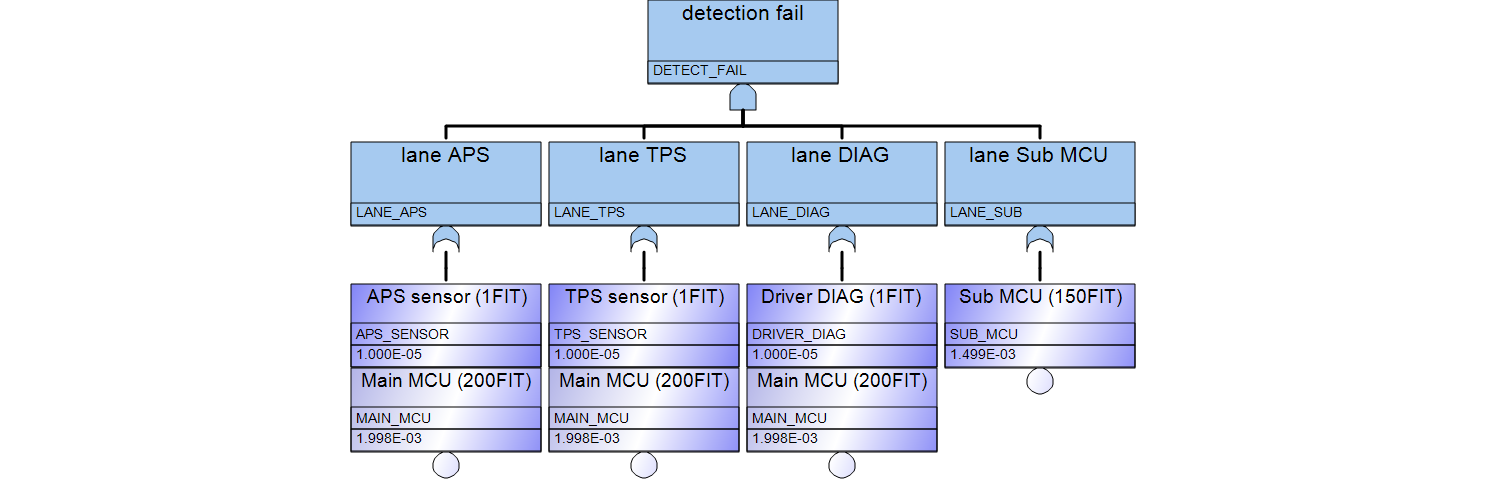
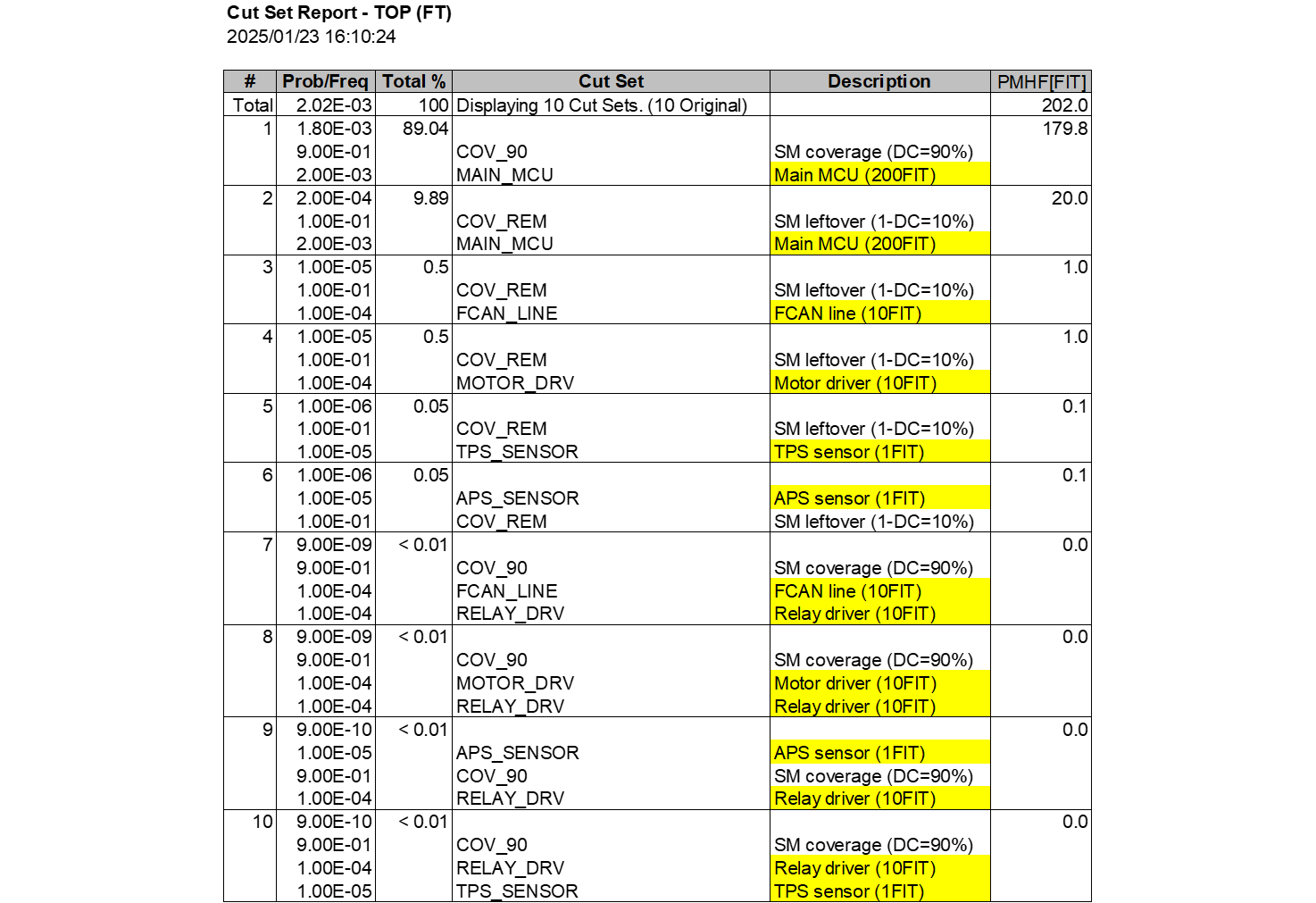
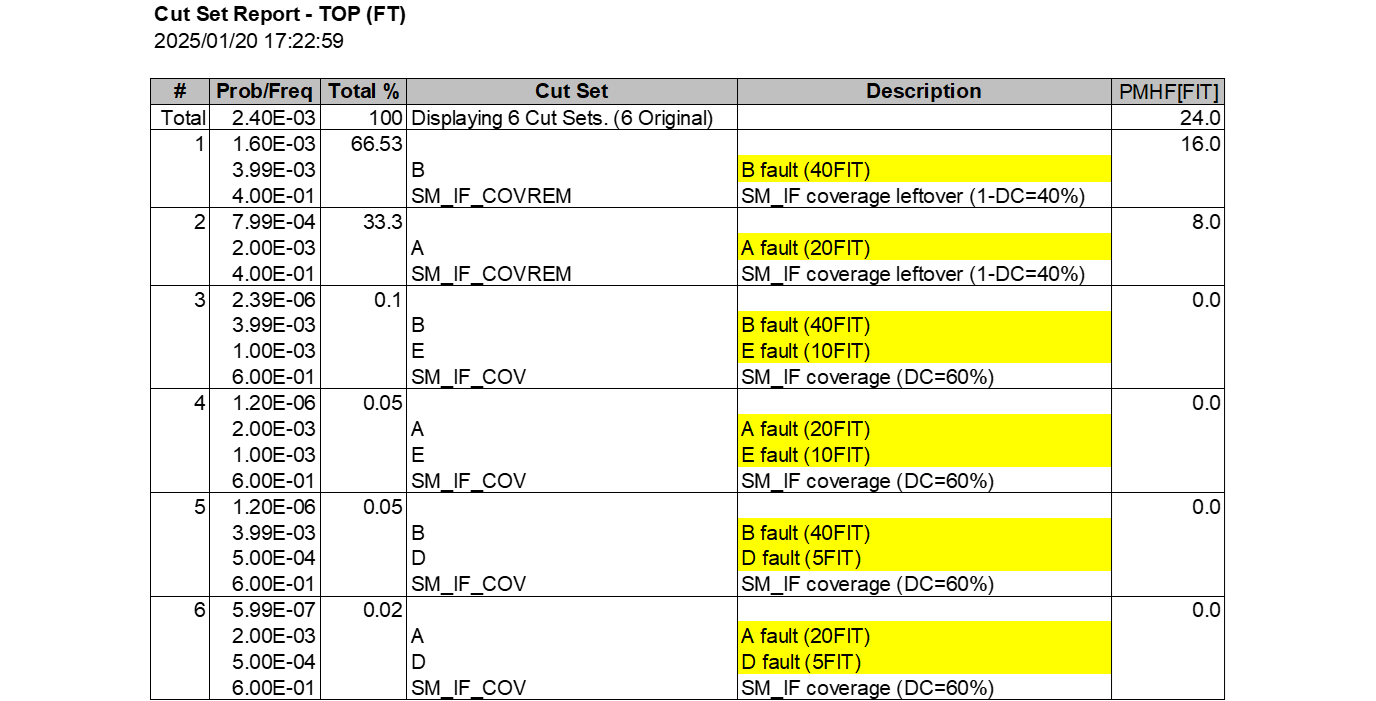
これらをSaphireに取り込んだところ、図943.1のようなFTが自動生成されました。
$$\img[-1.35em]{/images/withinseminar.png}$$
なお、本稿はRAMS 2026に投稿予定のため一部を秘匿していますが、論文公開後の2026年2月頃に開示予定です。