|
28 |
PMHF式の導出 (2) |
故障検出周期
検出時点での故障率を、以下のように安全機構により検出できる部分とできない部分に分解します。またそれぞれの場合の条件を以下に示します。
- 安全機構が周期$\tau_{SM}$で故障検出された際に検出できない故障率の部分は、なんど検出しても検出されないため、車両寿命の間中レイテントとなる。
- 安全機構が周期$\tau$で故障検出した際に検出できる故障率の部分は、$t=0$~$\tau_{SM}$まではレイテントとなる。その後$t=\tau_{SM}$においてゼロ時間で修理される。
次に車両寿命におけるそれぞれの頻度を考えると、
- $t=0$〜$T_{lifetime}$までの一回
- $\frac{T_{lifetime}}{\tau_{SM}}$回
従って、(15.1)は正確には、上記の2つの事象確率と頻度の積を加えあわせ、 \[ M_{PMHF,DPF,A\rightarrow B}=\frac{1}{T_{lifetime}}F_{DPF,A\rightarrow B}(T_{lifetime}) =\frac{1}{T_{lifetime}}[F_{DPF,l,A\rightarrow B}(T_{lifetime})+\frac{T_{lifetime}}{\tau_{SM}}F_{DPF,d,A\rightarrow B}(\tau_{SM})] \]\[ \approx\frac{1}{2}\lambda_B(\lambda_{A,DPF,l}T_{lifetime}+\lambda_{A,DPF,d}\tau_{SM})\tag{16.1} \]
となります。
(16.1)は、「レイテント状態のエレメントAの不信頼度」に「Bの故障率」をかけたものです。前者をグラフ化したものが図16.1です。$DC=0$、つまり定期的な故障検出によりエレメントの故障が検出されない場合は、(14.1)のとおりです。一方、エレメントの故障が検出される部分がある場合には、検出時点で修理されるため、その分の不信頼度はゼロとなり、故障が検出されない部分のみが累積していきます。
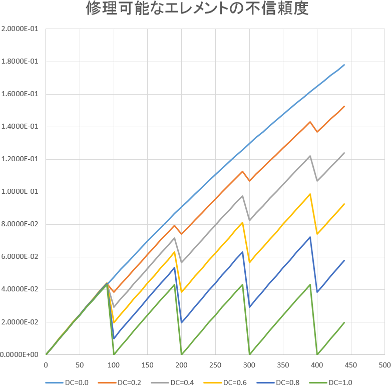
青のグラフがDC=0の場合、オレンジがDC=20%の場合、グレーがDC=40%の場合、黄色がDC=60%の場合、濃青がDC=80%の場合、緑がDC=100%の場合をそれぞれ表します。

