対象ブロック図
図17.1にPMHFの計算となるブロック図を示します。主機能Mに対して1st SMであるSMが設置されており、Mの2nd SMであるSM2-M及びSMの2nd SMであるSM2-SMが設置されています。Part10の記法に従い、SMのDC(Diagnostic Coverage)は$K_{M,FMC,RF}$、SM2M及びSM2SMのDCはそれぞれ$K_{M,FMC,MPF}$及び$K_{SM,FMC,MPF}$と書かれます。M、SMの故障率はそれぞれ$\lambda_M$、$\lambda_{SM}$ですが、2nd SMはλ=0となります。さらにMは安全機構ではないため(冗長の場合はSMとなりますが)、DC及び$\tau$(故障検出周期)は存在しません。さらにM及びSMの$\tau$は存在せず、SM2M及びSM2SMの$\tau$はそれぞれ$\tau_M$及び$\tau_{SM}$となります。
規格には明確に書かれていませんが、故障が検出された場合はゼロ時間で完全に修理されることが、暗黙に仮定されています。
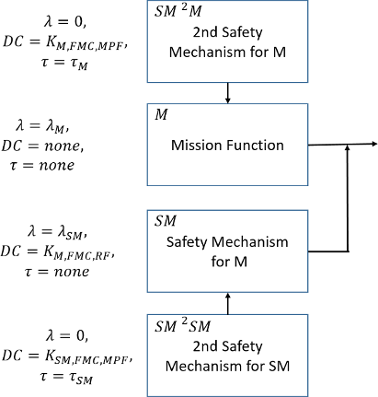 図17.1 対象サブシステムブロック図
図17.1 対象サブシステムブロック図
PMHF式の導出
規格の「SMが先に故障してその後Mが故障する場合」は誤りであることは説明しましたが、式を吟味すると「SMがどうであれMが故障してSG侵害となる場合」であるようです。従ってそのように読み替えれば、規格第1式は、
$$
M_{PMHF}=M_{PMHF,SPF}+M_{PMHF,DPF,SM\rightarrow M}\tag{17.1}
$$
であり、これを計算すると、
$$
M_{PMHF,M}\approx \lambda_{M,RF}+\frac{1}{2}\lambda_{M,DPF}\lambda_{SM}\lbrace (1-K_{SM,FMC,MPF})T_{lifetime}+K_{SM,FMC,MPF}\tau_{SM}\rbrace\tag{17.2}
$$
となり、これは規格第1式と正確に一致します。
最終的なPMHFを求めます。SPFとDPFは排他事象であり、また、「主機能故障でレイテント⇒安全機構故障」とその逆の「安全機構故障でレイテント⇒主機能故障」も排他事象です。排他事象は確率が加え合わせられることから、トータルのPMHFは上記を(11.1)に適用して、(17.3)となります。
$$
M_{PMHF}=M_{PMHF,SPF}+M_{PMHF,DPF,M\rightarrow SM}+M_{PMHF,DPF,SM\rightarrow M}\tag{17.3}
$$
これに対して、SPFに関しては(12.2)を適用します。さらに、DPFに関しては(15.2)に基づき、主機能故障と安全機構故障の順番を考慮して先の2パターンのPMHFを加え合わせれば、PMHF式(17.4)が得られます。
$$M_{PMHF}\approx \lambda_{M,RF}+\lambda_{M,DPF}\lambda_{SM}\lbrace (1-K_{SM,FMC,MPF})T_{lifetime}+K_{SM,FMC,MPF}\tau_{SM}\rbrace\tag{17.4}$$
となり、これは$K_{SM,FMC,MPF}\tau_{SM}\approx0$の場合、規格第3式と一致します。
※このブログは2016年に書かれたものであり、新しい研究結果を以下に連載していますので、参考にしてください
https://fs-micro.com/post/show/id/59.html
 前のブログ
次のブログ
前のブログ
次のブログ
