|
3 |
PMHFの誤解 (3) |
Business Cubeのプレゼン資料においてPMHFの誤りを発見しました。ASIL-Dでは0.01[FIT]、ASIL-Cでは0.1[FIT]とありますが、いずれも誤りです。1st editionの時点からそれぞれ10[FIT]、100[FIT]でした。2nd editionでは緩和されましたが、10FITの目標値は変わっていません。
その次のページには矛盾した数値が書かれています。ASIL-Dではこの10[FIT]が正しい目標値です。
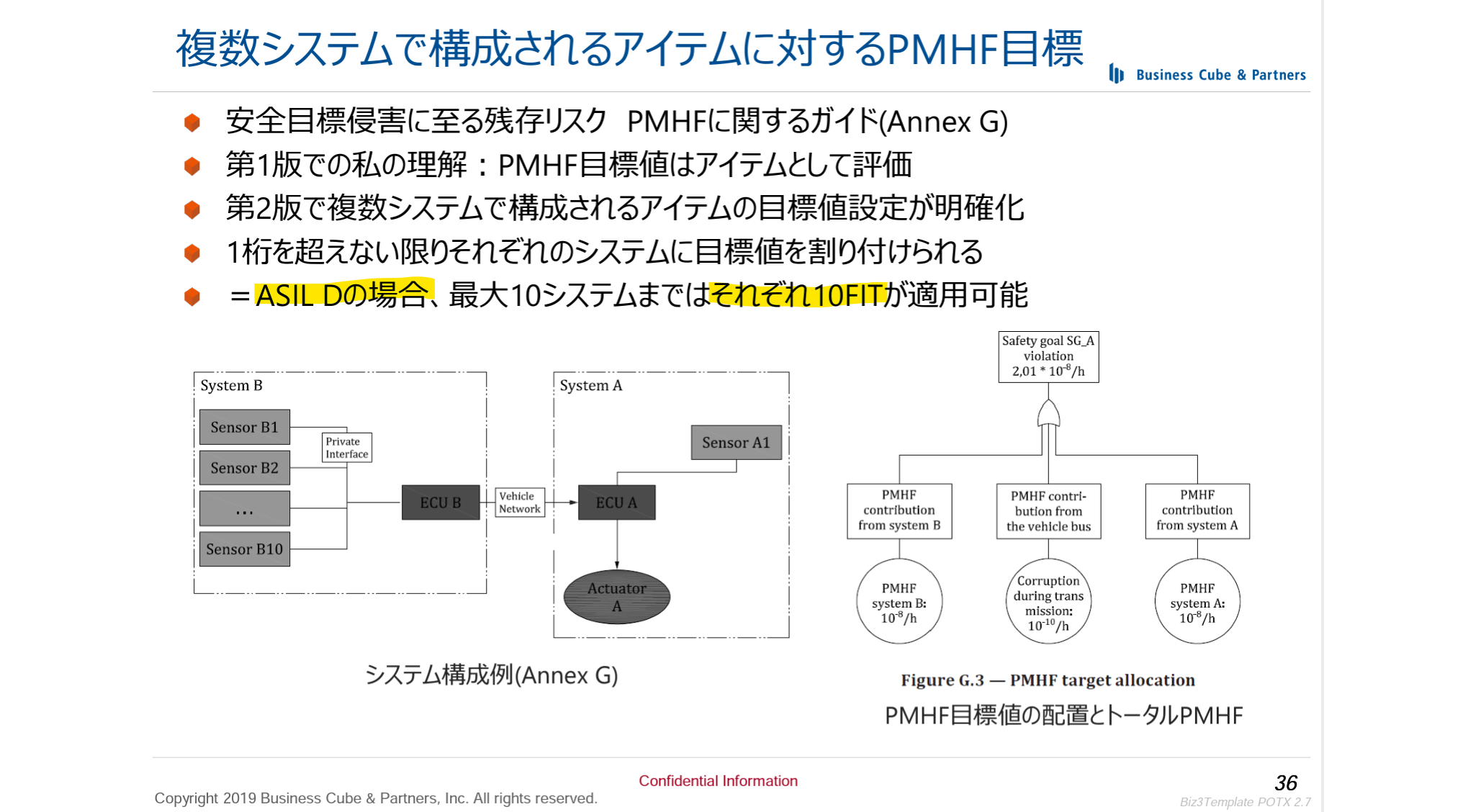
このページ(図522.2)のとおりです。、PMHFの目標値は2nd editionではサブシステム毎になり、アイテムとしてはおよそ10倍まで緩和されたものの、サブシステムとしては10[FIT]です。
