テストベンチ
テストベンチは変わりません。
Tb.bsv
import StmtFSM::*;
import Uart::*;
(* synthesize *)
module mkTb();
Uart_ifc uart <- mkUart();
Stmt s = seq
delay(8);
uart.load(8'h55);
uart.load(8'haa);
uart.load(8'hc3);
uart.load(8'h3c);
await(uart.done());
$finish;
endseq;
mkAutoFSM(s);
endmodule
Bsimシミュレーション
Bsimシミュレーションのコマンドは次のとおりです。
$ bsc -u -sim Tb.bsv; bsc -sim -e mkTb -o Tb.exec; ./Tb.exec -V bsim.vcd; gtkwave -A bsim.vcd
以下にBsimシミュレーション結果を示します。意外なことに明示的にdone信号を書いたにも関わらず、シミュレーションのダンプの中にdone信号がありませんでした。
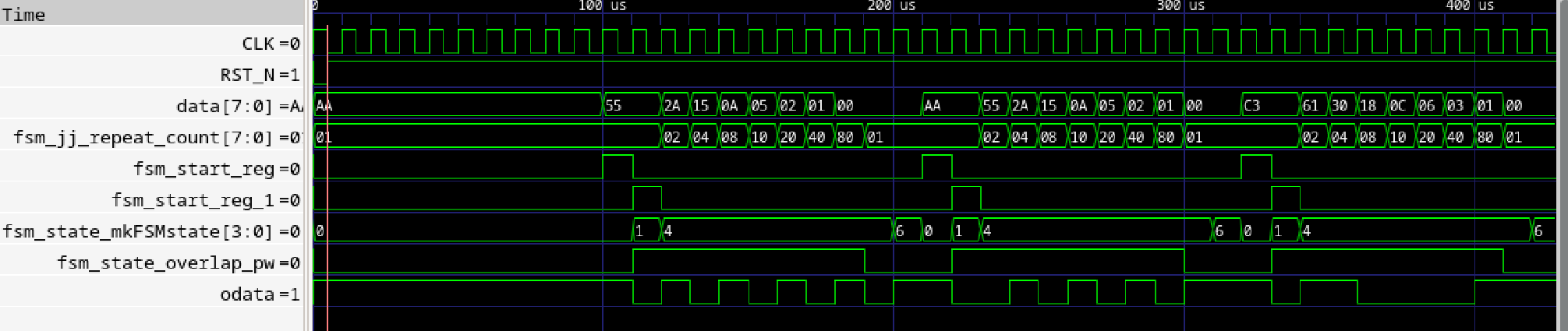 図512.1 Bsimシミュレーション波形
図512.1 Bsimシミュレーション波形
テストベンチ内でレジスタにuart.doneを格納するようにしたら、インタフェースにuart.doneが現れました。awaitで使用するくらいでは削除され、レジスタに取って初めて残すようです。
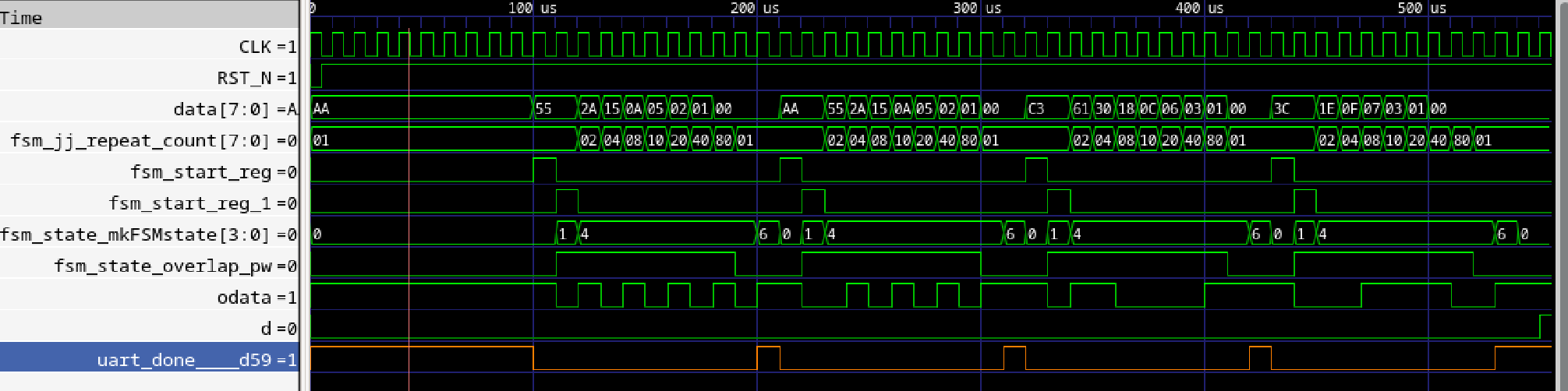 図512.2 Bsimシミュレーション波形
図512.2 Bsimシミュレーション波形
Verilogシミュレーション
Verilogシミュレーションにおいては、モジュール(mkUart.v)、それをドライブするテストベンチ(mkTb.v)の上位に最上位(top.v)を配備します。これはクロックやリセットを供給するモジュールですが、Bsimの場合はシステムから暗黙にクロックやリセットが供給される一方、Verilogでは供給されないためです。
top.v
`timescale 1ns/1ns
module top();
/*AUTOREGINPUT*/
// Beginning of automatic reg inputs (for undeclared instantiated-module inputs)
reg CLK; // To mkTb_inst of mkTb.v
reg RST_N; // To mkTb_inst of mkTb.v
// End of automatics
/*AUTOWIRE*/
mkTb mkTb_inst(/*AUTOINST*/
// Inputs
.CLK (CLK),
.RST_N (RST_N));
initial begin
RST_N = 1'b0;
#10;
RST_N = 1'b1;
end
initial begin
CLK = 1'b0;
forever begin
#5 CLK = ~CLK;
end
end
initial begin
$dumpfile("verilog.vcd");
$dumpvars;
end
endmodule // top
Verilogシミュレーションのコマンドは次のとおりです。
$ bsc -u -verilog Tb.bsv; iverilog top.v mkTb.v mkUart.v -o ./mkTb.exev; ./mkTb.exev; gtkwave -A verilog.gtkw
Verilogシミュレーションのほうには当然ですが、uart.done信号が存在します。
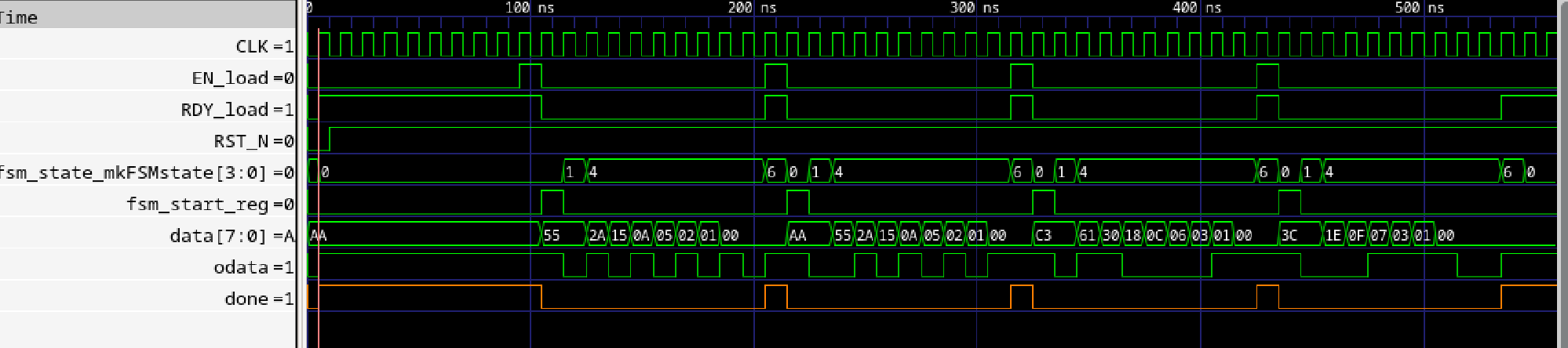 図512.3 Verilogシミュレーション波形
図512.3 Verilogシミュレーション波形
 前のブログ
次のブログ
前のブログ
次のブログ