|
25 |
本ブログの研究に基づく論文がIEEE信頼性学会の国際会議で採択 |
ニュースリリースでも明らかにしたように、このブログで研究してきたPMHFの一般式が、RAMS 2020に採択されました。ブログにおいて機能安全の知識は前提として良いので、注釈を取り除き、逆にブログとの関連の注釈☆をつけて再掲します。リリース文を茶色、注釈を青色で表示します。
なお、RAMS 2020に投稿中だったため、最新の研究#103~108を非開示としていましたが、今回採択が決定したので、RAMS 2020終了後(2020年2月頃)に公開予定です。

ISO 26262機能安全コンサルティングを提供するFSマイクロ株式会社(本社:名古屋市)代表取締役社長 桜井 厚の論文が、2019年10月19日、IEEE Reliability Society主催の国際学会である第66回RAMS(RAMS 2020)に採択されました。RAMS 2020は、2020年1月27日から30日まで、アメリカ・カリフォルニア州パームスプリングスのマリオット・ルネッサンスにて開催予定です。(☆1月30日最終日の12:15~14:15に開催されるコロキアムセッションにて発表します。)

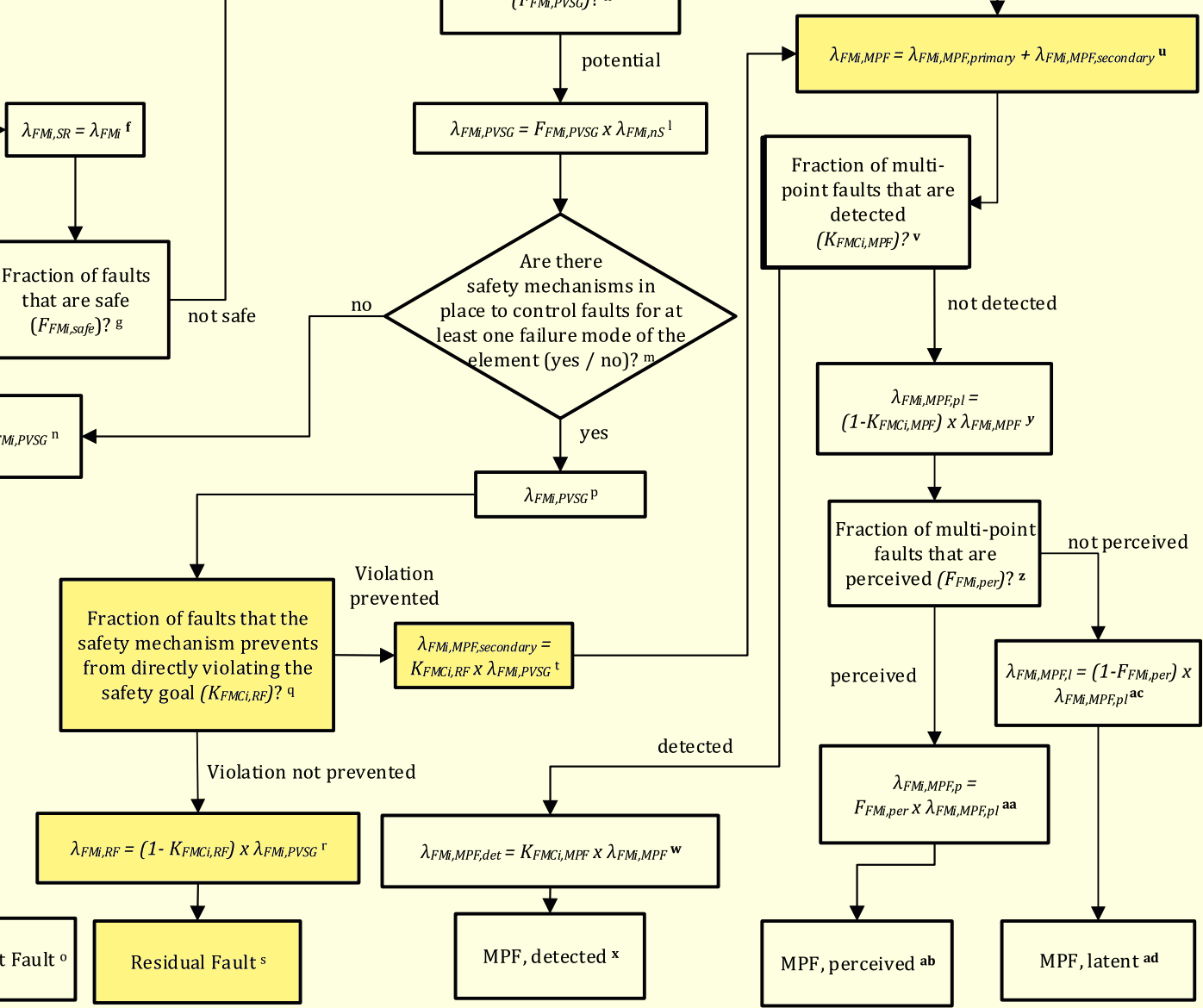
論文の題名は「Generic Equations for a Probabilistic Metric for Random Hardware Failures According to ISO 26262」です。邦題は「ISO 26262に準拠したランダムハードウェア故障の確率的メトリクスの一般式」であり、ランダムハードウェア故障の確率的メトリクス(PMHF)を正確に評価することを可能にするものです。(☆上記にもあるように、本ブログでは#103~108で書きましたが、暫定非公開中です。⇒RAMS 2020が終了したので、当該記事を公開に変更しました。)
2011年に車載電子機器における機能安全の国際規格であるISO 26262の初版が、また、2018年には改訂版が発効されました。この規格改訂版においてはPMHF式が変更されていますが、PMHF値の数学的な定義や、エレメントの前提条件が明確ではありませんでした。(☆エレメントの前提条件とは具体的には修理可能性のことです。規格初版と規格改定版で、この修理可能性の前提を変えていると推測します。)
本論文ではこれらの点を明確にし、さらに規格に準拠した周期的な検査が行われるエレメントの不稼働確率式を初めて明らかにしました。
(☆不稼働確率については前記事に記載しています。)
これに基づき、一般的なサブシステムに関するPMHF式を新たに導出しました。本論文によりPMHF値を正確に評価できるため、広範な車載ECUにおいて、適正な安全設計を実施することが可能となります。また、緊急操作許容時間間隔(EOTTI)に関する過剰な設計制約を軽減できるため、自動運転システムに代表される耐故障システムにおいて、設計工期の短縮や製品コストの低減が可能となります。
(☆EOTTIの31倍の過剰見積もりについては前記事に記載しています。)
商号 FSマイクロ株式会社
代表者 桜井 厚
設立年月日 2013年8月21日
資本金 3,200万円
事業内容 ISO 26262車載電子機器の機能安全のコンサルティング及びセミナー
本店所在地 〒460-0011
愛知県名古屋市中区大須4-1-57
電話 052-263-3099
メールアドレス info@fs-micro.com
URL http://fs-micro.com