|
29 |
2nd EditionにおけるPMHF式 |
ISO 26262 2nd Edition
今年春発行と予定されていた2nd EditionはFDISの状況となっていますが、正式発行が遅れているようです。FDISは最終的な規格から語句のレベルしか修正されないとのことで、FDISで検討すればほぼ問題無いと考えられます。
さて、PMHFの部分はだいぶ変更されています。公式が変わっただけでなく、SMが安全目標侵害するケースまで想定されています。元々弊社では一般的なサブシステムを検討対象とした論文も投稿しており、両方のエレメントが安全目標侵害する場合を対象としていましたので、好都合です。
図68.1のパターン1と2はいずれもSM1が先にフォールトし、次にIF(Intended Function)がフォールトするケースです。そのうち、パターン1はフォールトが検出されない場合、パターン2はフォールトが検出される場合です。一方、パターン3と4はいずれもその逆順にフォールトするケースです。そのうちパターン3はフォールトが検出されない場合、パターン4はフォールトが検出される場合です。
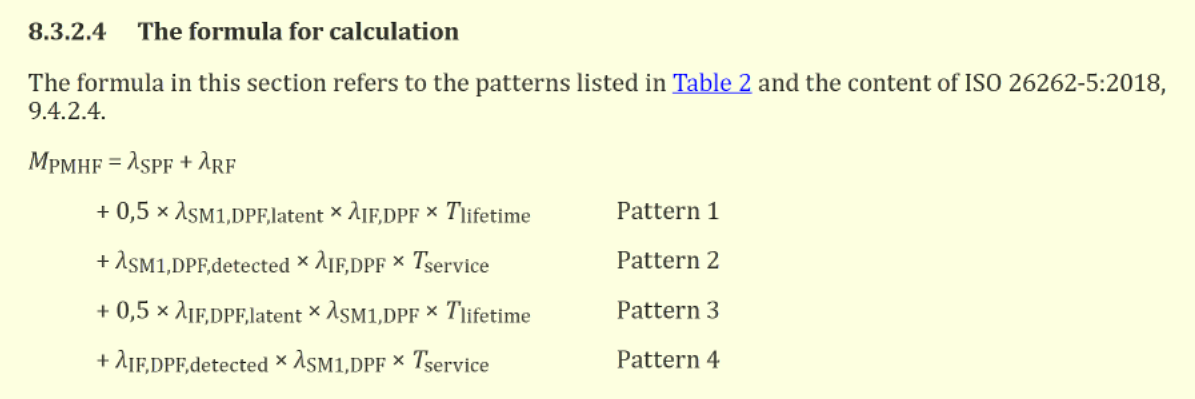
実はパターン1と2あるいは3と4は特に分ける必要はありません。弊社の式に従えば不稼働率の関数$Q(t)$(59.8)で自然に表されるからです。一方、パターン1と3、2と4はフォールト順序なので、マルコフ状態遷移図に基づく検討が必要です。
重要 1st Editionでは主機能が非修理系であるという前提のもとに、ケース分類で確率を求めています。ところが、2nd Editionも同じ非修理系前提で、ケース分類でPMHF式を求めています。本来対称的に扱うのであれば、両方とも修理系にすべきです。そうすると、主機能であってもVSGとならないフォールト(MPフォールト)を起した後、2nd SMにより検出される部分は修理されることになります。すると、本ケース分けには当てはまらなくなります。例えば、主機能がMPフォールトし、2nd SMにより検出され修理される。次にSM1がMPフォールトし、検出され修理される。これが繰り返されることは十分あり得ますが、規格のケース分類だとこの場合は、Pattern3+Parttern4に相当します。これはマルコフ状態遷移図を書いて初めて理解されることなので、ISO 26262のPMHF理解のためにはマルコフ状態遷移図は必須です。
シングルポイントフェイリャ
ここで、$\lambda_{SPF}, \lambda_{RF}$は定義が書かれていませんので、IFによるものか、SM1によるものも含むのかが定かではありません。しかしながら、

このように、SM1のPVSG、つまりSM1の安全目標侵害の可能性があると、ECCの例まで挙げて書かれているので、おそらく$\lambda_{RF}$は以下のようになると考えられます。これは、サブシステムを構成する2つのエレメントがどちらも主機能かつSMとなるような一般モデルで考えます。具体的には冗長サブシステムの場合が相当します。 $$ \lambda_{RF}=\lambda_{IF,RF}+\lambda_{SM1,RF}=(1-K_{FMC,SM1,RF})\cdot \lambda_{IF}+(1-K_{FMC,SM2,RF})\cdot \lambda_{SM1}\tag{68.1} $$
