|
5 |
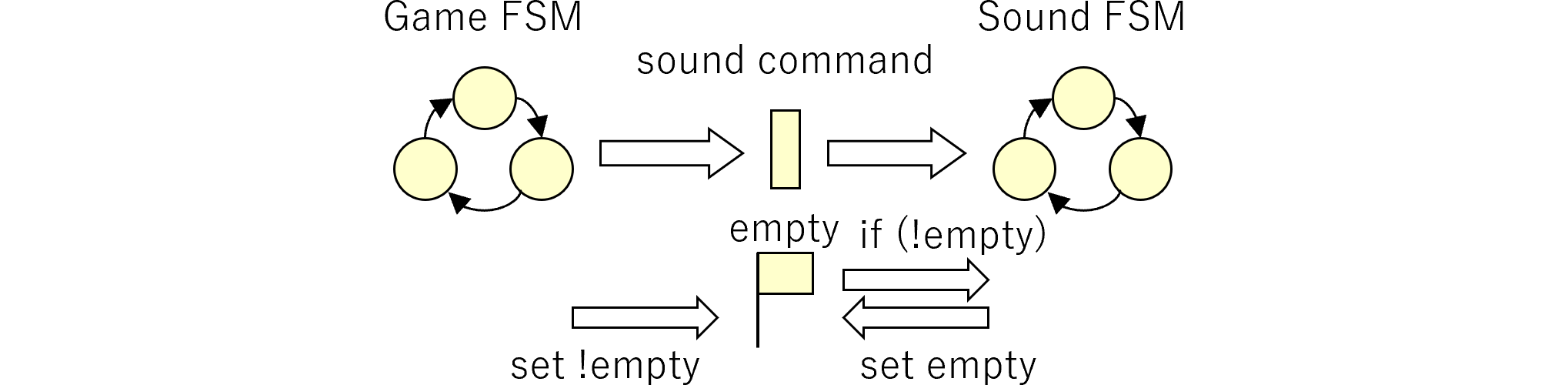
ゲームFSMとサウンドFSMの連携 |
Ultra96においてBSVで開発
元々Verilog版では、コマンドバッファに書き込むだけで特に何もしなくても動作していました。今回BSVで再設計する際に、サウンドを4chとし、取りこぼしを避けるために考えたのがサウンドキュー(FIFO)でした。

これはVivadoのFIFOジェネレータで作成したため、最小段数でもかなり深く1024段程度となっています。 実験したところ、確かに取りこぼしは無いのですが、一方、サウンドがゲームとズレて行き、まるでサウンドレコーダのような動作になってしまいました。そのため、FIFOを1段に修正しました。FIFOジェネレータでは1段のFIFOは作成できないのでVerilogで記述しました。1段のためFIFOと呼ぶのはおかしいのでコマンドバッファと呼ぶことにします。
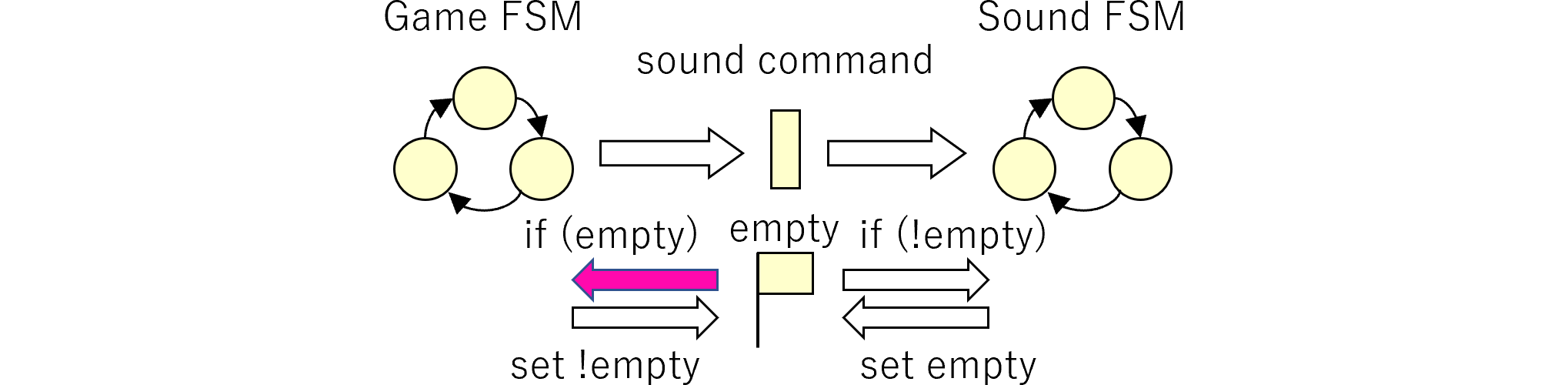
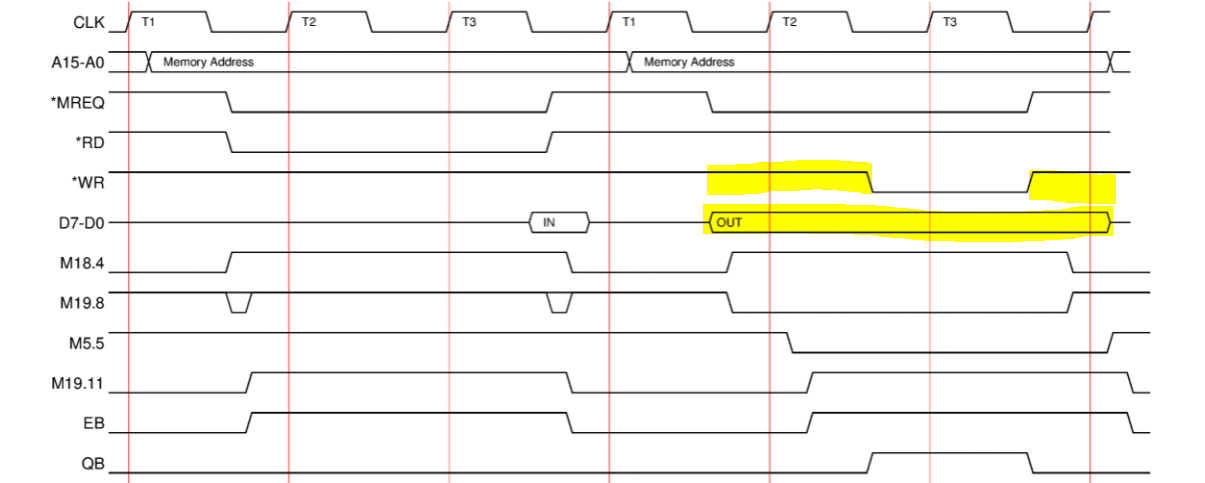
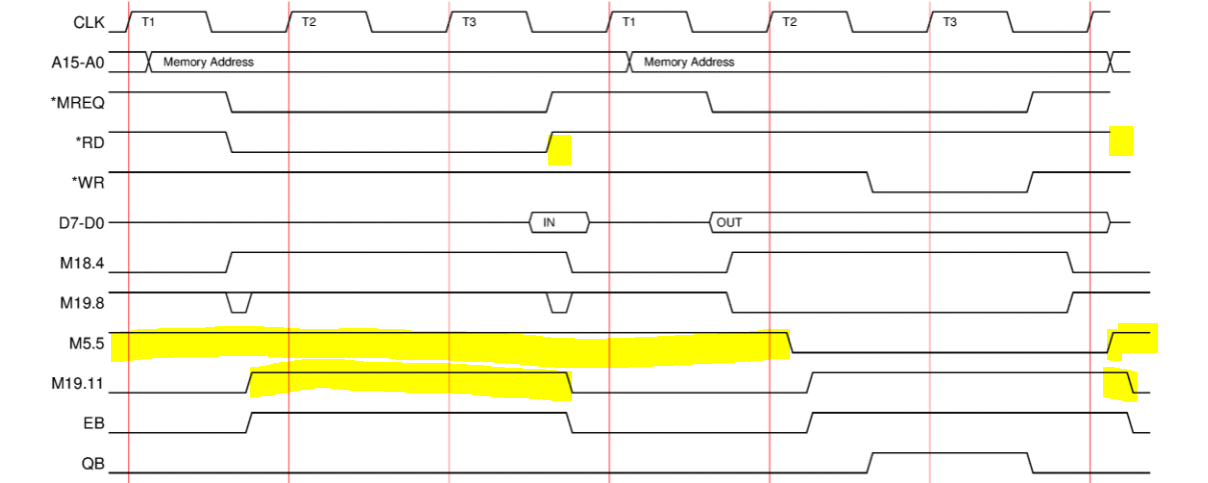
コマンドバッファには、ゲームFSMからコマンドが来たことを示すフラグemptyを設け、書き込むと!emptyとなるようにします。サウンドFSMからは!emptyの時に新たにコマンドが来たと判断し、コマンドを読んだ後にemptyに変更します。
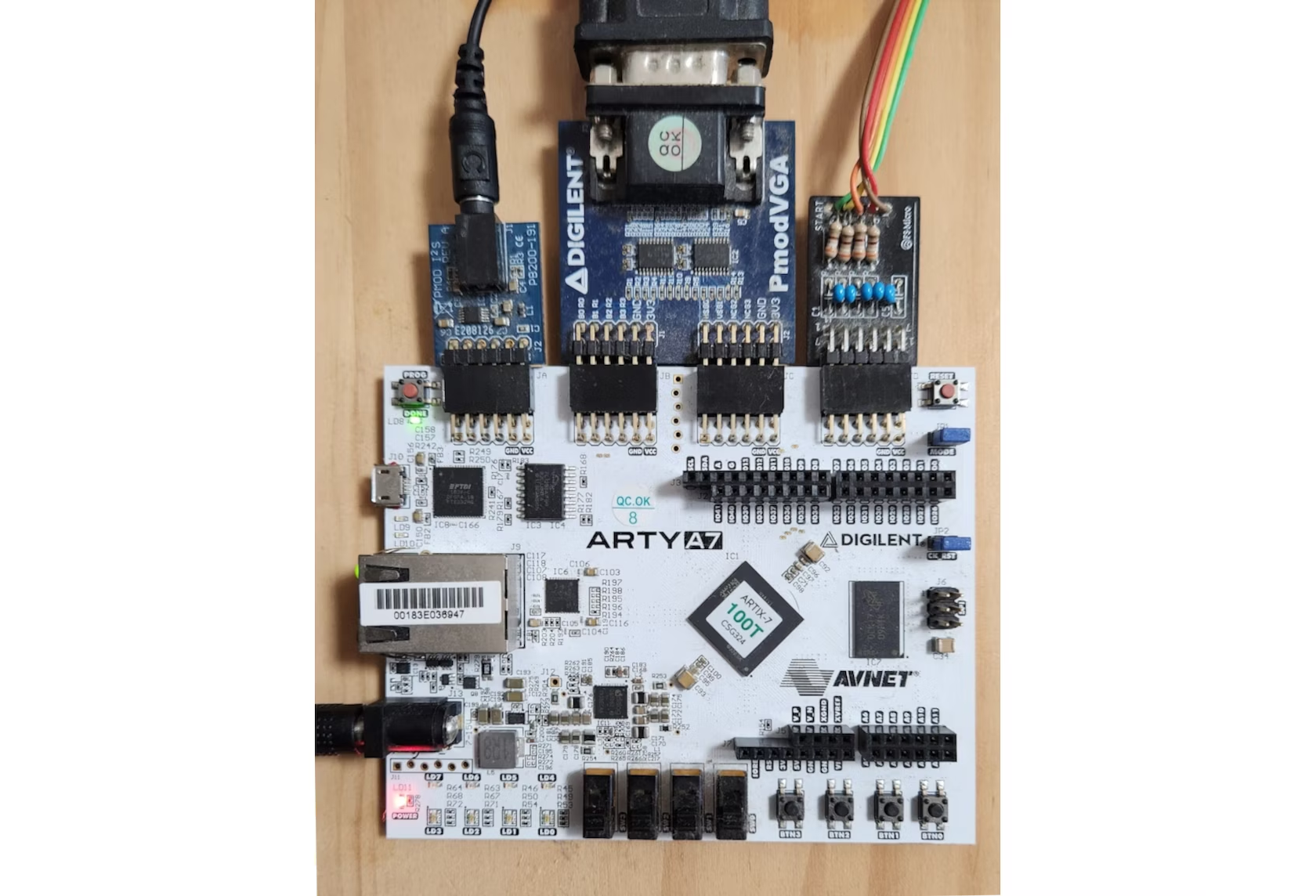
Artyボード移植後
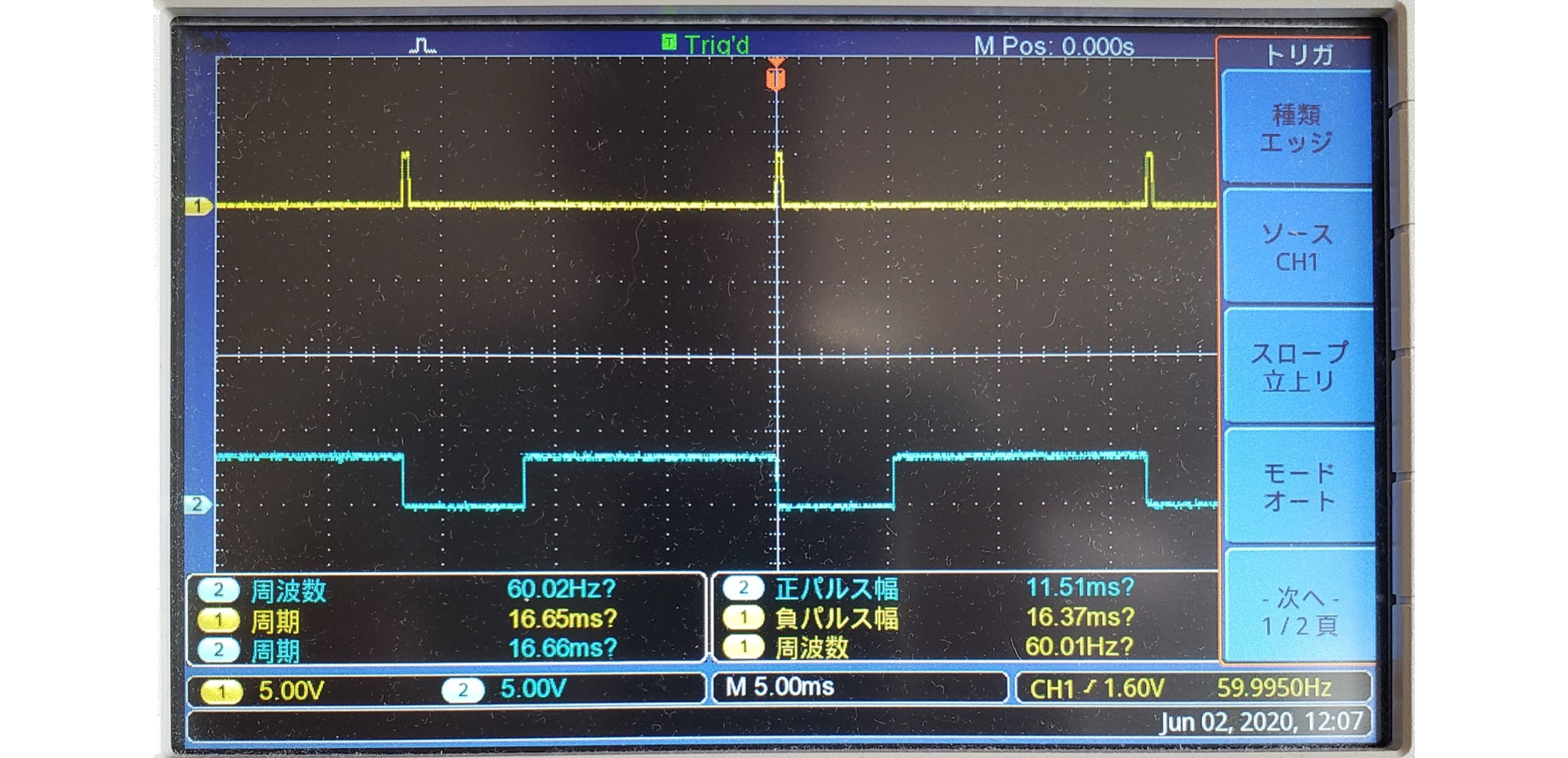
Ultra96ではこれで動作していたのですが、Artyボードに移植後に自機増加音が無視されることに気づきました。サウンドFSMが取りこぼしているのだと推測し、再考すると、ゲームFSMが不必要に速いことに気づきました。DSOを接続して調べたところ、96.4%がウェイトだと判明したので、これを1MHzに落としたところ、動作するようでした。
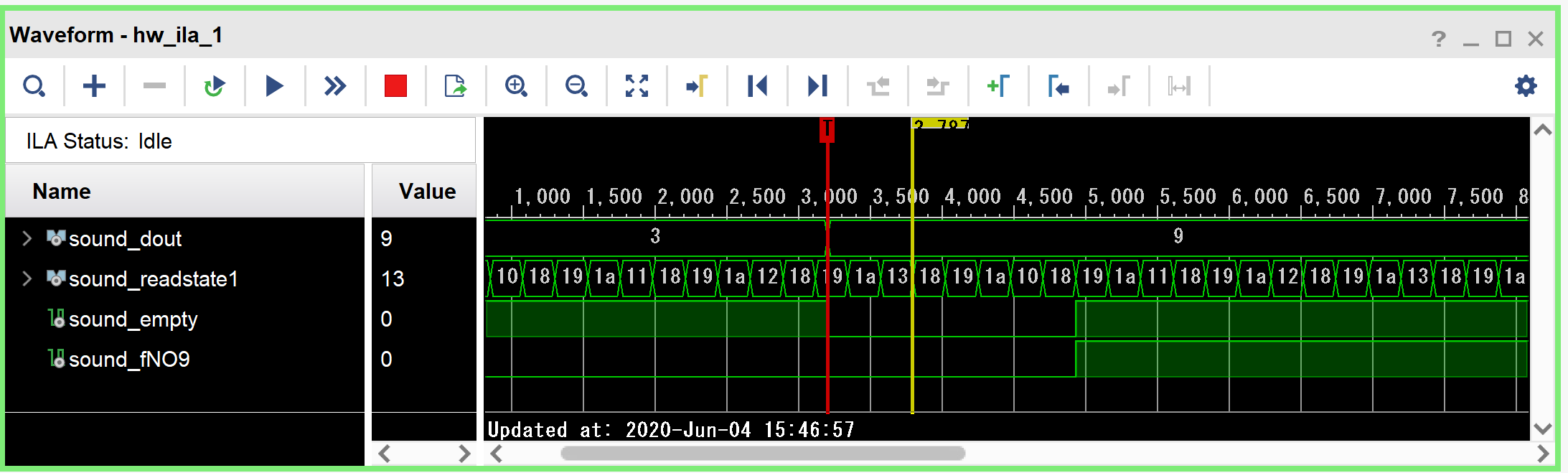
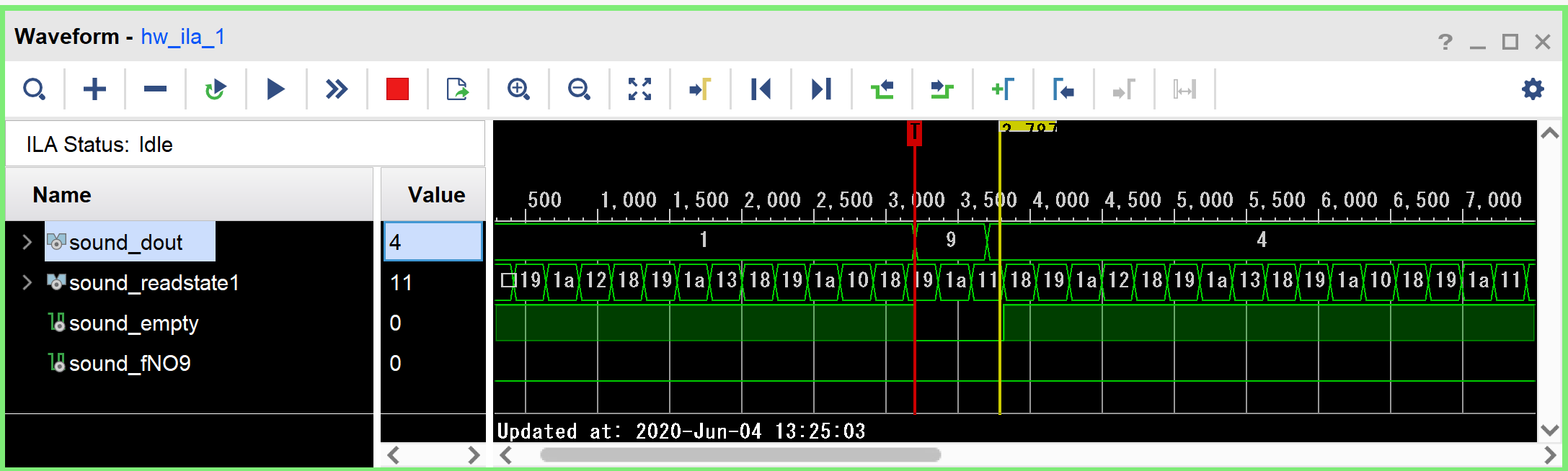
ところが実験すると、依然として自機増加音(コマンドNo.9)が無視されるようです。そこで、ILAを接続して、
- サウンドコマンド
- サウンドFSMステート
- コマンドバッファemtpy
- サウンドFSM内部フラグ(fNO9)
を観測しました。最後の内部フラグfNO9は自機増加音がプリエンプトされないように割込みを禁止するためのフラグで、コマンドNo.9を受け付けた際にTrueになる信号です。
従って、コマンドの書き込みの際にemptyである場合のみ書き込み、!emptyの場合は捨てる処理を行います(図271.4のマゼンタ矢印の処理を追加)。