|
7 |
規格第2版のPMHF式の疑問 (16) |
弊社CTMCベース
一方、弊社の方式ではフォールト生起順序と積分順序は同一です。
CTMC理論
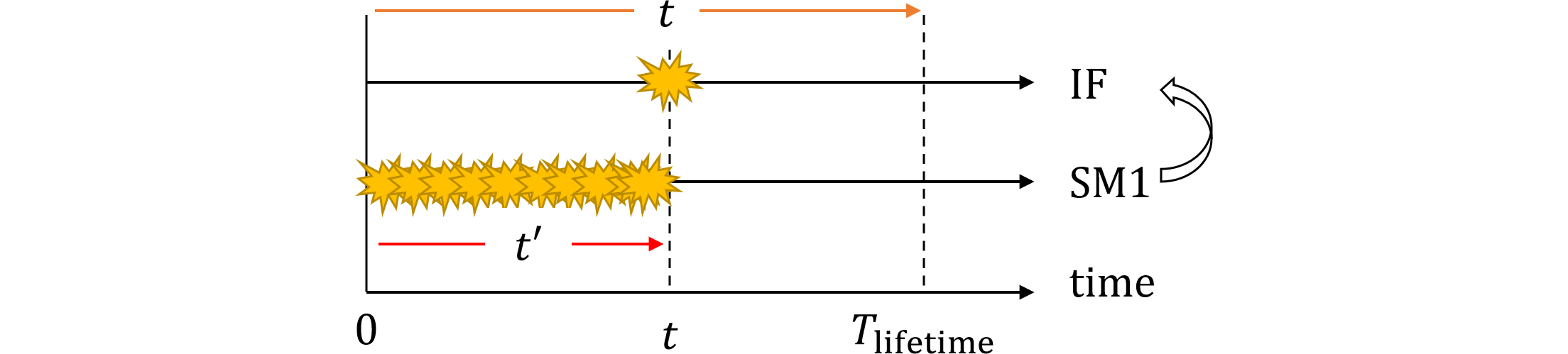
CTMC理論に基づけば、時刻$t$におけるサブシステムのレイテントとなる状態確率は「SM1がdownかつSM2により非検出かつIFがup」であるため、 $$ \Pr\{\text{SM1 down at }t\cap\text{fault not detected}\cap\text{IF up at }t\}=F_\text{SM1,DPF,lat}(t)R_\text{IF}(t)\\ =(1-K_\text{SM1,DPF})F_\text{SM1}(t)R_\text{IF}(t)\tag{480.2} $$ レイテント状態における微小時間間隔$dt$間の遷移確率(条件付き確率)は、公式(66.8)より $$ \require{cancel} \Pr\{\text{IF down in }[t, t+dt)|\bcancel{\text{SM1 down at }t}\cap\text{IF up at }t\}=K_\text{IF,DPF}\lambda_\text{IF}dt\tag{480.3} $$ となります。従って確率は(480.2)と(480.3)の積を$0$から$T_\text{lifetime}$まで積分した $$ K_\text{IF,DPF}(1-K_\text{SM1,DPF})\int_0^{T_\text{lifetime}}F_\text{SM1}(t)R_\text{IF}(t)\cdot\lambda_\text{IF}dt\tag{480.4} $$ となり、(480.1)$\color{red}{※}$で示すパターン1のDPF確率と一致します。
両者の比較
前稿の解説書の方式はフォールトと順序積分順序が逆ではあるものの、図479.1と図480.1を比較すれば、特に大きな問題はなさそうですし実際に結果も一致します。しかしながら、弊社の方式はCTMC理論でも裏付けされており、フォールトと順序積分順序も一致しているため、straight forwardだと考えます。
結論
本来の条件であるIFとSM1の両方がrepairableであるというシンプルな条件と異なるため、誤りではあるものの、規格第2版の前提と想定される、以下のおかしな条件(図313.1)によるPMHF式の導出はこれで完了です。
- サブシステムはIFとSM1とSM2から構成される。
- もしSM1のフォールトが最初に起きた場合、SM1はrepairableとなりIFはunrepairableとなる。
・SM1のフォールトのSM2により検出されない部分は修理されず、暴露時間は$T_\text{lifetime}$となり、 (Pattern 1)
・SM1のフォールトのSM2により検出される部分は修理され、暴露時間は$T_\text{service}$となり、 (Pattern 2)
暴露時間中における引き続くIFの最初のフォールトでDPFが発生する。⇒IFUモデル - もしIFのフォールトが最初に起きた場合、IFはrepairableとなりSM1はunrepairableとなる。
・IFのフォールトのSM1により抑止されない部分は修理されず、暴露時間は$T_\text{lifetime}$となり、 (Pattern 3)
・IFのフォールトのSM1により抑止される部分は修理され、暴露時間は$T_\text{service}$となり、 (Pattern 4)
暴露時間中における引き続くSM1の最初のフォールトでDPFが発生する。⇒SMUモデル
なお、本稿はRAMS 2024に投稿予定のため一部を秘匿していますが、論文公開後の2024年2月頃に開示予定です。
