|
6 |
定量FTAによるPMHF計算法 (7) |
規格の例題のALUの永久故障に関するパラメータをまとめます。図は論文に投稿したターゲットサブシステムの図です。
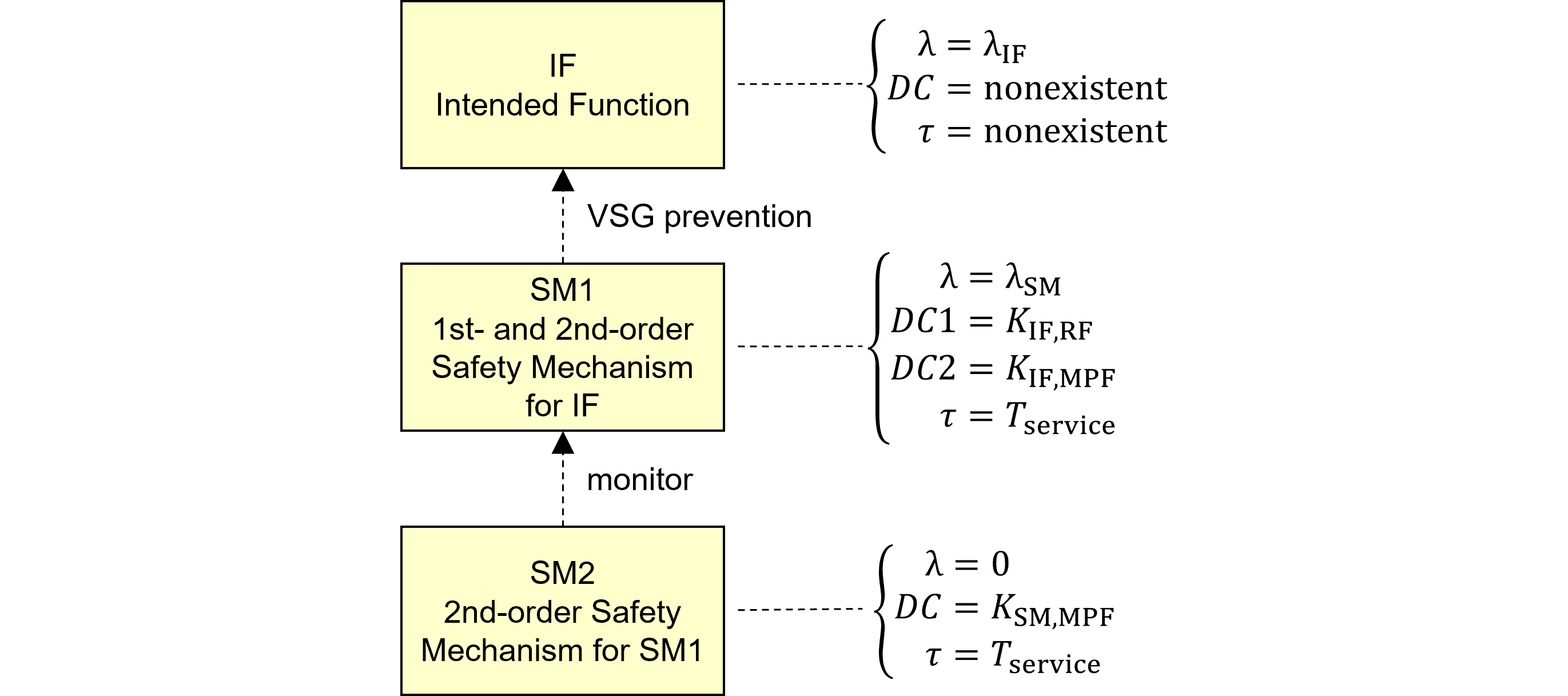
この図に基づき、規格のFTから得られたobservable parametersを以下に示します。 $$ T_\text{lifetime}=5,000 [H] $$
$$ \begin{eqnarray} \text{IF}\quad &&\left\{ \begin{array}{l} \lambda&=&3.48\times10^{-11} [H^{-1}]\\ DC&=&\text{nonexistent}\\ \tau&=&\text{nonexistent} \end{array} \right.\\ \text{SM1}\quad &&\left\{ \begin{array}{l} \lambda&=&2.9\times10^{-12} [H^{-1}]\\ DC1&=&0.2\\ DC2&=&\text{nonexistent}\\ \tau&=&\text{nonexistent} \end{array} \right.\\ \text{SM2}\quad &&\left\{ \begin{array}{l} \lambda&=&0 \\ DC2&=&0.9\\ \tau&=&1.0 [H] \end{array} \right. \end{eqnarray} $$
それぞれ、IF, SM1, SM2について説明を示します。
- ミッションタイム:車両寿命$T_\text{lifetime}$です。
- IF:ALUはIFなのでそもそもカバレージ$DC$も定期検査周期$\tau$もありません
- SM1:ALUは冗長系ではないため、ALUはレイテントフォールトとなりません。そのため、ALUにはSM2は存在せず、LFカバレージ$DC2$もなければ定期検査周期$\tau$もありません。一方、ALUに対するVSG抑止カバレージ$DC1$は存在します。
- SM2:SM2は故障しないため、SM2の故障率$\lambda$はゼロです。一方、SM1に対するLFカバレージ$DC2$及び定期検査周期$\tau$が存在します。
