|
23 |
FTA (11) |
共通原因故障(CCF)
前稿では冗長制御方式を取り上げて、メインマイコンとサブマイコンがお互いに主機能とSMの関係になっており、SPFを防止していることを説明しました。共通原因故障(Common Cause Failure, CCF)が無い理想的な場合にはこれが成立します。一方、メインマイコンとサブマイコンにCCFを持つ場合にはどうなるか、MCSを取得してみましょう。
CCFの例
メインマイコンとサブマイコンに共通の発振回路からクロックを供給している場合はどうでしょうか? メインマイコン発信回路の故障をBE028、サブマイコン発振回路の故障をBE031としていたもとのツリーを変更してBE031をBE028に置き換えてみます。こうすると冗長系の両側に共通の故障原因BE028を持つことになり、MCSを取得すると以下のようにANDの下だったものが上位のORに接続され、SPFの原因となります(図29.1)。
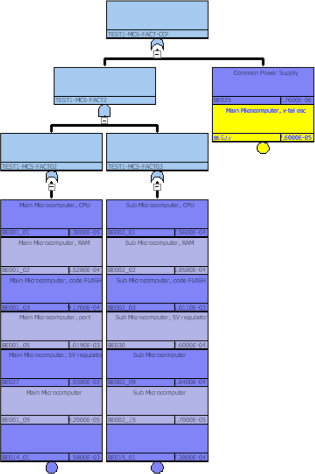

図29.2はブール代数の分配則であり、これにより上記論理変換が行われます。
これは何を意味するかというと、共通の電源、クロック源、あるいは共通の型番を持つと、単一のランダムハードウェア故障ないしはシステマティック故障により、メインマイコンとサブマイコンのお互いの安全機構の構造が崩れて、単一原因により安全目標が侵害されるとことになり、重要な故障となることを意味します。
ISO26262はこのCCFを定量的に計算する手段を規定していないため、ISO26262のベース規格であるIEC61508に記述されているCCFのβファクタを援用することになります。また、ISO26262の発展規格であるISO19451において、従属故障分析(DFA, Dependent Failure Analysis)として詳述されていますので、ご参照ください。

Leave a Comment