|
5 |
SF2の修正はAF2となる理由 |
RAMS 2024で発表した論文のプレゼンテーション資料から一部を示します。
SF2式
過去論文により冗長アーキテクチャに対応した新しいPMHF式を提案しました。これをここではAF2と呼びます。
$$ M_\text{PMHF}=(1-K_\text{IF,RF})\lambda_\text{IF}+K_\text{IF,RF}\lambda_\text{IF}\lambda_\text{SM}\left[(1-K_\text{MPF})T_\text{lifetime}+K_\text{MPF}\tau\right]\\ s.t.\quad K_\text{MPF}:=K_\text{IF,MPF}+K_\text{SM,MPF}-K_\text{IF,MPF}K_\text{SM,MPF} \tag{AF2} $$
一方で、規格第2版に掲載の以下のPMHF式をSF2と呼ぶと、明らかに両者は異なります。

ここでAF2のSPF項である$(1-K_\text{IF,RF})\lambda_\text{IF}$とSF2のSPF項である$\lambda_\text{SPF}+\lambda_\text{RF}$は等しいため、AF2とSF2の違いはDPF項のみとなります。
両方の式どうしが等しいことを簡単に証明します。まず、$K_\text{IF,RF}=0$とするとこれはSMが存在しない場合を表し、$\lambda_\text{SPF}=\lambda_\text{IF}$です。次に$K_\text{IF,RF}\ne0$の場合は、$\lambda_\text{RF}=(1-K_\text{IF,RF})\lambda_\text{IF}$であり、これはRFの定義式です。
SF2の状態遷移図
我々は2019年に日本で発行された第2版規格式の解説書により、SF2の導出過程には11か所の誤りがあることを識別しました。それを全て修正したものがAF2となることを今回のRAMS 2024で発表しました。最も重大な誤りであるステート遷移の誤りについてここに示します。
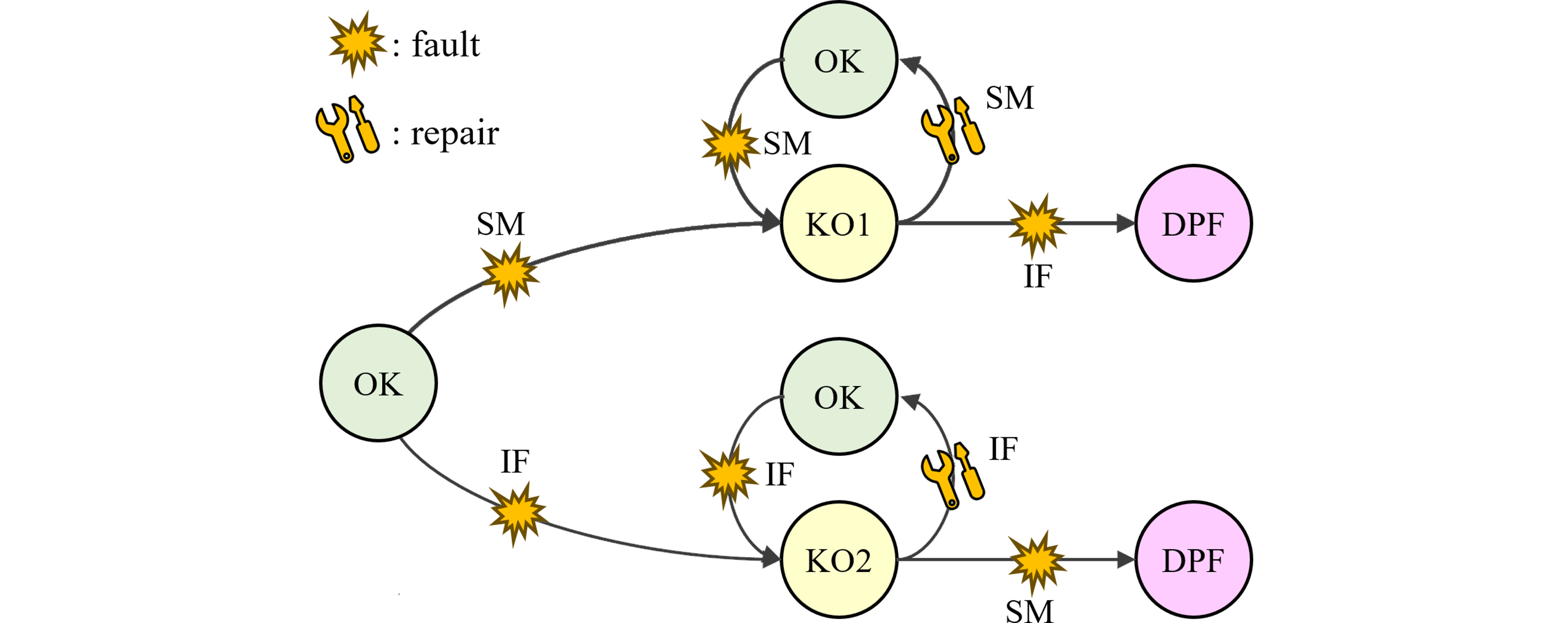
図738.1は規格式SF2の元になったと推測されるステート遷移図です。ただしこれは規格に書かれているわけではなく、図738.1のSF2から逆に求めた状態遷移図であることに注意が必要です。
修正したSF2の状態遷移図
規格のステート遷移図はIFとSMのリペアビリティが誤っていると考えるため、弊社では図738.3のようにグリーンで橋渡しを行い、SF2モデルを修正しました。弊社の考える規格の誤りは、初期のOK状態からIFもしくはSMの一方が非修理となっている点です。本来はIFもSMもリペアラブルでなくてはならないと考えます。
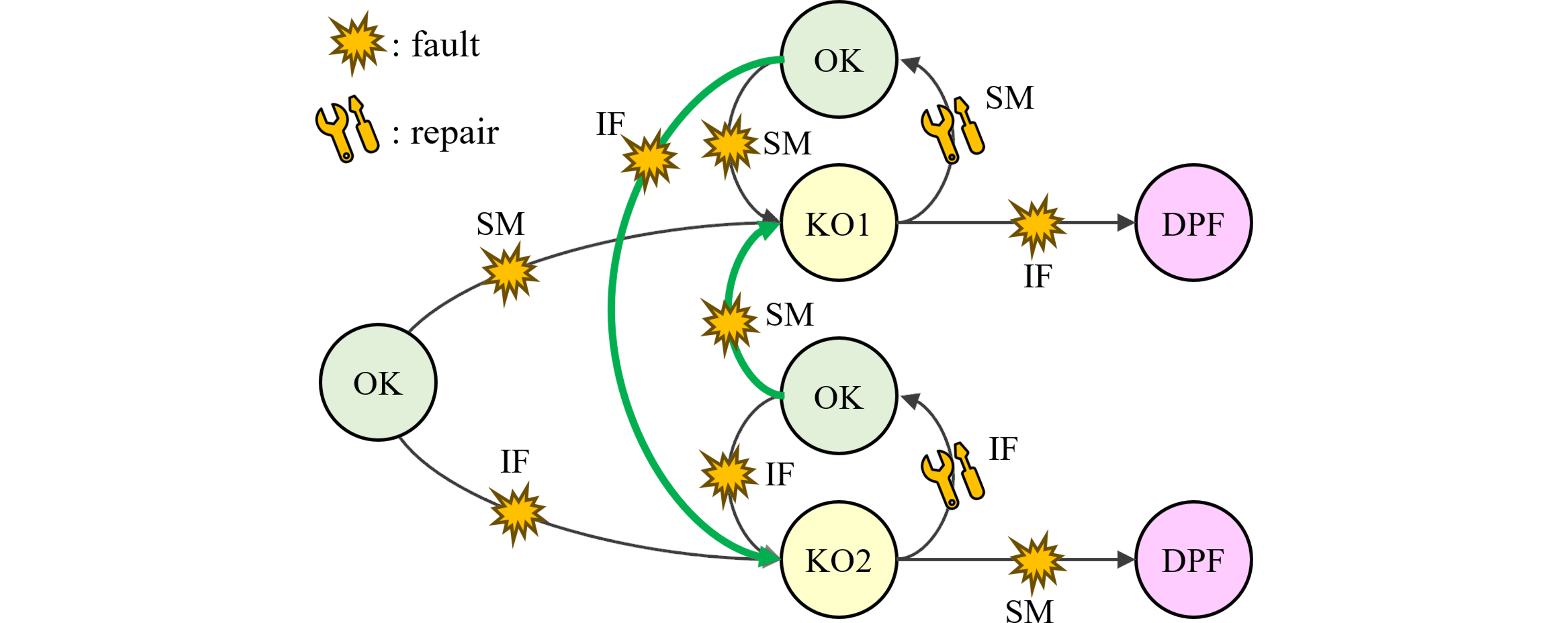
図738.2が図738.1のとおり、4つのパターンにしか対応していないのに対して、図738.3は無限のパターンに対応している点が異なります。
両者のリペアラビリティの違い
規格によるパターン分析は、DPFにおいて、SM⇒IFもしくはIF⇒SMの引き続くフォールト順の2つにケース分けをしている点で正しいように見えますが、修理順が誤っています。図738.2のように一旦SMのフォールトが起きると、それがリペアされても初期状態には戻らず、次はSMのフォールトしか許されていません。
一方、弊社の修正によれば図738.3のように、一旦リペアされればSMのフォールトでもIFのフォールトでも生起することが可能です。これが本来の意味のIFとSMのリペアラブルという意味です。
ただし、一見すると状態遷移図が複雑になったように見えます。
