|
26 |
ASILデコンポジション論文ward2012 (5) |
論文ward2012$\dagger$の続きです。 2番目の例としてより複雑なSteer-by-wireを取り上げます。
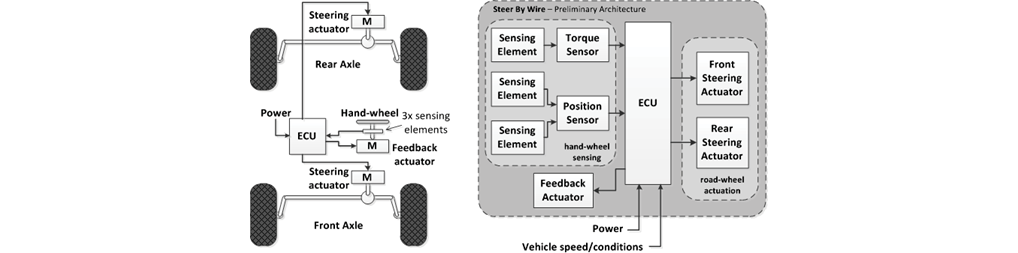
In this example (which is intended to illustrate principles and not represent a real design) a 4-wheel steer-by-wire system is under development. Here, the hand-wheel input is sensed and processed into commands for control of the front and rear axle actuators. A third actuator provides haptic feedback to the driver at the hand-wheel.
この例では(原理を説明するためのものであり、実際の設計を示すものではありません)4輪ステアバイワイヤシステムが開発されています。ここでは、ステアリングの入力が感知され、フロントアクスルとリアアクスルのアクチュエータを制御するためのコマンドに処理されます。第3のアクチュエーターは、ステアリングでドライバーに触覚フィードバックを提供します。
図302.1はSteer-by-wireのシステムブロック図です。
このシステムには多くの安全目標が設定されており、要求分解をしていった結果、以下の要求がステアリングセンシングと車輪アクチュエーション(項目の他の要素の中で)に課せられています。
REQ 32: Failure of the road-wheel actuation shall not lead to an absence of directional control of the vehicle. [ASILD]
REQ 32: 車輪の作動の故障により、車両の方向制御ができなくなることがあってはならない。 [ASIL D]
REQ 49: Failure of the hand-wheel sensing shall not lead to an incorrect indication of the driver’s intended direction to the ECU [ASIL D]
REQ 49: ステアリングセンシングの故障により、ECUに運転者の意図する方向が正しく表示されないことがあってはならない。 [ASIL D]
$\dagger$Ward, D. D., & Crozier, S. E. (2012). The uses and abuses of ASIL decomposition in ISO 26262. 7th IET International Conference on System Safety, Incorporating the Cyber Security Conference 2012.
