※この記事は2018年に書かれたものであり、基本的には変わりませんが最近の記事で詳細計算を行っています。
SMのアンナベイラビリティ(不稼働率、PUA)$Q_{SM}(t)$の導出
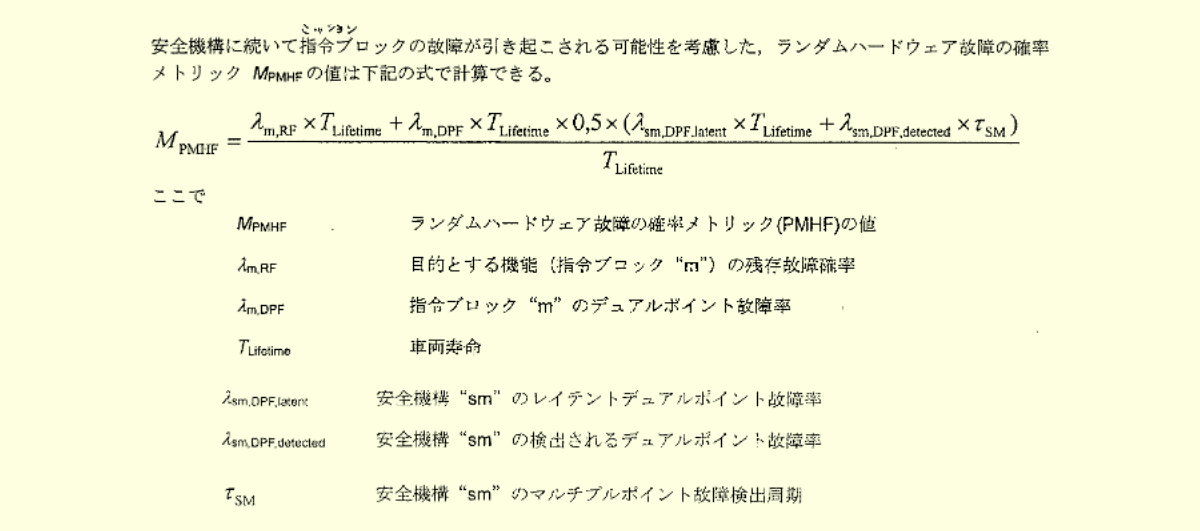
以前PMHF式を以下で導出しました。
https://fs-micro.com/post/show/id/10.html
ここでは再度PMHFの式を導出して行きますが、事前準備がいくつか必要になりますので、まず、修理系のアンナベイラビリティの公式を導きます。
まず、修理系とは何かを説明します。ISO 26262規格には修理の問題についてはっきり書いていませんが、1st SMが修理系となります。1st SMとは、1st order SMとも呼ばれ、主機能のSG侵害(安全目標侵害=VSG)を防止するためのSMです。一方で、主機能は非修理系です。
1st SMは、2nd SMにより定期的に検査され、故障だと判明した場合は直ちに修理されます。2nd SMとは2nd order SMとも呼ばれ、エレメントがレイテントフォールトとなるのを防止する安全機構です。規格にもあるとおり、修理周期は「検査周期($\tau_{SM}$)+ドライバーが修理工場へ運転して行く時間+修理にかかる時間」です。従って、修理周期=2nd SMの検査周期とみなせます。
規格にははっきり書かれていませんが、検査により故障と判明した部分については、修理され新品同様(as good as new)と見なされます。この検査による故障検出割合が重要であり、Part 10では定数値$K_{FMC,MPF}$で表されます。故障したうちの検出部分なので(59.1)のように条件付き確率と考えがちですが、
$$K_{FMC,MPF}=\Pr\lbrace \text{detectable}\ |\ \text{failed at }t \rbrace\tag{59.1}$$
故障検出能力は確率的に決まるものではなく、アーキテクチャ的に決まるものだと考えるため、もともとの検出部分の故障について検出可能とします。
$$K_{FMC,MPF}=\Pr\lbrace \text{detectable} \rbrace\tag{59.2}$$
検出された故障は全て修理されるものとします。
$$\Pr\lbrace \text{repaired}\ |\ \text{detected at }t\rbrace=1\tag{59.3}$$
次にアンナベイラビリティ$Q_{SM}(t)$とは、省略せずに言うとポイントアンナベイラビリティ(PUA)であり、修理系の不稼働率です。
確率の式で表せば、
PUA:
$$Q_{SM}(t):=\Pr \lbrace \text{(repairable)SM down at }t \rbrace\tag{59.4}$$
のように、時刻$t$において不稼働である確率を意味します。
一方で、アベイラビリティの式は参考ページまたはBirolini教授の教科書を参照すれば、
$$
A(t):=R(t)+\int_0^t m(x)R(t-x)dx\tag{59.5}
$$
であり、ここで、$A(t)$は時刻tにおけるポイントアベイラビリティ、$R(t)$は時刻tにおけるリライアビリティ(信頼度)、$m(t)$は時刻tにおけるリニューアル密度(修理密度)です。規格の特徴として、修理周期は教科書一般にあるように指数関数分布はとらず、定期的に$\tau_{SM}$毎に行われるため、以下の式が成立します。
$$A_{SM}(t)=R_{SM}(t)+K_{SM,FMC,MPF}F_{SM}(\tau_{SM})\sum_{i=0}^{n-1}R_{SM}(t-i\tau_{SM})\tag{59.6}$$
修理分$K_{SM,FMC,MPF}F_{SM}(\tau_{SM})$が時刻$t$の関数でないのは、検出能力$K_{FMC,MPF}$は一定で、かつ毎回の故障確率も一定で、検出した分は全て修理されるため、修理分が一定となるためです。
従って、SMのポイントアベイラビリティ式は以下のようになります。
$$A_{SM}(t)dt=\img[-1.35em]{/images/withinseminar.png}\tag{59.7}$$
これを1から引けば、SMのポイントアンアベイラビリティ(PUA)は以下のように求められます。
PUA:
$$Q_{SM}(t)dt=\left[1-A_{SM}(t)\right]dt=\img[-1.35em]{/images/withinseminar.png}\tag{59.8}$$
(59.8)の両辺を時刻$t$で微分すれば、微分可能な$t$におけるPUD(Point Unavailability Density)が求められます。
PUD:
$$q_{SM}(t)dt:=(\frac{dQ_{SM}(t)}{dt})dt=\img[-1.35em]{/images/withinseminar.png},\\
\ t\notin\{\tau_i=i\tau; i=1,2,...,n\}\tag{59.9}$$
※ここでの議論において、次に示すような形式的な記法を用いています。例えば、
$$f(t)=\lim_{dt\to +0}\frac{F(t+dt)-F(t)}{dt}=\frac{dF(t)}{dt}$$
と書くところを$dt$が無限小であることを前提として、
$$f(t)dt=dF(t)$$
としています。確率密度関数$f(t)$を求めるよりも、微小確率$f(t)dt$を求めるほうが、次での積分の記述が容易になるためです。
なお、本稿はRAMS 2025に投稿予定のため一部を秘匿しています。
 前のブログ
次のブログ
前のブログ
次のブログ