|
23 |
RAMS 2027採択へのマイルストーン (2) |
Posts Tagged with "PMHF"
既に発行済みのブログであっても適宜修正・追加することがあります。We may make changes and additions to blogs already published.
|
24 |
新PMHF式の導出 IFUモデル編 (3) |
ここで、$U_\text{SM}(t)$は、 $$ U_\text{SM}(t)=(1−K_\text{SM2,DPF})F_\text{SM}(t)+K_\text{SM2,DPF}F_\text{SM}(u),\ \ u:=t\bmod\tau \tag{1095.1} $$ と導出されますが、ここで故障率が非常に小さい($\lambda_\text{SM1}u\le\lambda_\text{SM1}t\ll1$)ことを利用すれば、 $$ \begin{aligned} U_\text{SM}(t)&=(1−K_\text{SM2,DPF})(1-e^{-\lambda_\text{SM1}t})+K_\text{SM2,DPF}(1-e^{-\lambda_\text{SM1}u})\\ &\approx(1−K_\text{SM2,DPF})\lambda_\text{SM1}t+K_\text{SM2,DPF}\lambda_\text{SM1}u,\ \ u:=t\bmod\tau \end{aligned} \tag{1095.2} $$
従って、(1094.2)及び(1094.4)を加えれば
$$ \begin{aligned} f_\text{VSG}(t)&=f_\text{SPF}(t)+f_\text{DPF}(t)\\ &\img[-1.35em]{/images/withinseminar.png}\\ &=\lambda_\text{IF,SPF}+U_\text{SM}(t)\lambda_\text{IF,DPF} \end{aligned} \tag{1095.3} $$
VSG確率密度関数が求められたので、これに(1095.2)を代入し、車両寿命間で積分します。
$$ \require{cancel} \begin{aligned} &PMHF(T):=\frac{1}{T}F_\text{VSG}(T)=\frac{1}{T}\int_0^Tf_\text{VSG}(t)dt\\ &\img[-1.35em]{/images/withinseminar.png}\\ &=\lambda_\text{IF,RF}+\frac{1}{2}\lambda_\text{IF,DPF}\left[\lambda_\text{SM1,DPF,lat}T+\lambda_\text{SM1,DPF,det}\tau\right] \end{aligned} \tag{1095.4} $$
$$\img[-1.35em]{/images/withinseminar.png}$$ これはISO 26262初版のPMHF公式と完全に一致します。
本稿はRAMS 2027に投稿予定であるため、重要な数式を一部秘匿しています。
|
23 |
新PMHF式の導出 IFUモデル編 (2) |
図1094.1にIF-SM1-SM2から構成されるサブシステムの状態遷移モデルを示します。
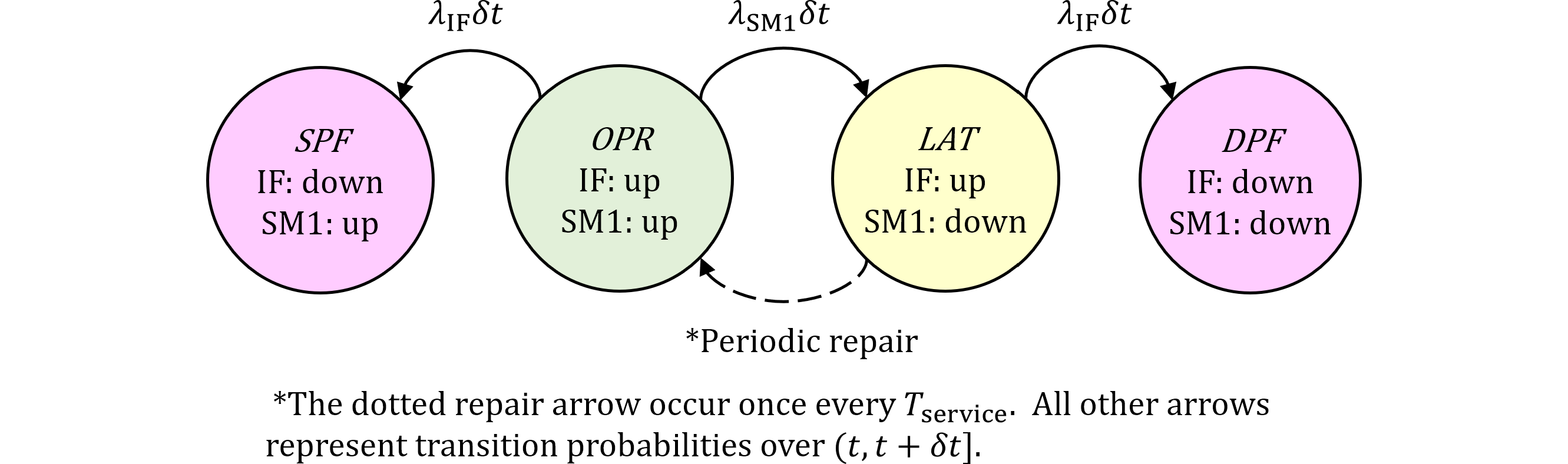
まず、微小時間間隔$[t, t+dt)$において初めてSPFによりVSGとなる場合を考えます。ここで、$F_\text{SPF}(t)$はSPF分岐による累積初回VSG確率を表すものとします。SPFは図1094.1においてOPR→SPFとなる場合です。ここで、IFの初回故障時刻を $\sigma_\text{IF}:=\inf\{s\ge0\mid \eta^\text{IF}_s\notin\mathcal{M}_\text{IF}\}$ とおきます。SPF分岐では、時刻$t$までIFが故障しておらず、時刻$t$でSM1が稼働中であり、区間$[t,t+dt)$でIFがSM1により防止できない故障集合$\mathcal{P}_\text{IF,SPF}$へ遷移します。 従って、IFとSMの故障は独立であること、及び条件つき確率の乗法定理を用いて
$$\img[-1.35em]{/images/withinseminar.png}$$
両辺を$dt$で割り、$dt\rightarrow0$の極限を取れば、
$$ f_\text{SPF}(t):=\frac{d}{dt}F_\text{SPF}(t)=A_\text{SM}(t)R_\text{IF}(t)\lambda_\text{IF,SPF} \tag{1094.2} $$
となります。さらに、通常の希事象近似ではIF自身の生存確率を$R_\text{IF}(t)\approx1$と置くため、
$$ f_\text{SPF}(t)\approx A_\text{SM}(t)\lambda_\text{IF,SPF} \tag{1094.3} $$
となります。ここで$A_\text{SM}(t)$は、OPR→SPF遷移に必要なSM1の稼働状態占有確率を表すため残します。一方、$R_\text{IF}(t)$は、IFが時刻$t$まで故障していないことを表す生存確率です。標準的なPMHF近似では、このIF自身の生存確率補正を1と置きます。
同様に初めてDPFによりVSGとなる場合を考えます。ここで、$F_\text{DPF}(t)$はDPF分岐による累積初回VSG確率を表すものとします。DPFは図1094.1においてLAT→DPFとなる場合です。この場合、時刻$t$でSM1は既に潜在故障状態にあり、IFはまだ故障していません。そのため、区間$[t,t+dt)$で後続のIF故障が発生するとDPFとなります。SM1は既に故障しているため、この後続IF故障は$\mathcal{P}_\text{IF,SPF}$ではなく、IF故障の全体集合$\mathcal{P}_\text{IF}$への遷移として扱います。
$$\img[-1.35em]{/images/withinseminar.png}$$
$\eta^\text{IF}_{t+dt}\in\mathcal{P}_\text{IF}$に注意します。SPFに遷移する場合は$\mathcal{P}_\text{IF,SPF}$への遷移を考えましたが、これはSM1が稼働している場合にSM1で防止できないIF故障だけがSPFとなるためです。一方、DPFに遷移する場合は既にSM1が潜在故障しているため、後続のIF故障はIF故障の全体集合$\mathcal{P}_\text{IF}$で扱います。
同様に両辺を$dt$で割り、$dt\rightarrow0$の極限を取れば、
$$ f_\text{DPF}(t):=\frac{d}{dt}F_\text{DPF}(t)=U_\text{SM}(t)R_\text{IF}(t)\lambda_\text{IF} \tag{1094.5} $$
となります。さらに、同じ希事象近似により$R_\text{IF}(t)\approx1$と置くため、
$$ f_\text{DPF}(t)\approx U_\text{SM}(t)\lambda_\text{IF} \tag{1094.6} $$
となります。
本稿はRAMS 2027に投稿予定であるため、重要な数式を一部秘匿しています。
|
22 |
新PMHF式の導出 IFUモデル編 |
以前の記事では確率の事象を記述するために $$ \Pr\{\text{IF up at }t\} \tag{1093.1} $$ 等と自然言語で記述していました。本稿からは確率論をベースにこれを集合で書くことにします。
確率空間$(\Omega, \mathcal{F}, \Pr)$を考えます。 IFのup state(動作状態)集合を$\mathcal{M}_\text{IF}$とし、$(\eta^\text{IF}_t)_{t\ge0}$を確率空間上のIFの確率過程とすれば、上記確率は、 $$ \Pr\{\eta^\text{IF}_t\in\mathcal{M}_\text{IF}\} \tag{1093.2} $$ と書けます。PMHFはVSGとなる確率の車両寿命平均であり、一度起きると再び動作することは無いと考えます。従って、
$$ M_\text{PMHF}:=\frac{1}{T}F_\text{VSG}(T) \tag{1093.3} $$ ただし、$T$は車両寿命です。ここで、最初にVSGとなる時刻を$\sigma_\text{VSG}$とすれば、それは以下で表せます。
$$ \sigma_\text{VSG}:=\inf\{t\ge0\mid N^\text{VSG}_t\ge1\} \tag{1093.4} $$ ただし、$(N^\text{VSG}_t)_{t\ge0}$はVSGの計数確率過程です。
また、反対にIFのdown state(不稼働状態)集合を$\mathcal{P}_\text{IF}$とすれば、VSGはIFUモデルの場合IFのフォールトのみで起こり、それはSPFとDPFに分解できることから、 $$ \mathcal{P}_\text{VSG}=\mathcal{P}_\text{IF,SPF}\cup\mathcal{P}_\text{IF,DPF},\ \ \mathcal{P}_\text{IF,SPF}\cap\mathcal{P}_\text{IF,DPF}=\varnothing \tag{1093.5} $$ Christiane Cocozza-Thivent他の論文"The Failure Rate in Reliability. Numerical Treatment"の(1.2)式によれば、Vesely故障率は以下のように定義されます。
$$ \begin{cases} \lambda_\text{v,IF,SPF}(t):=\displaystyle\lim_{dt\rightarrow0}\frac{\Pr\{\eta^\text{IF}_{t+dt}\in\mathcal{P}_\text{IF,SPF}\mid\eta^\text{IF}_{t}\in\mathcal{M}_\text{IF}\}}{dt},\\ \lambda_\text{v,IF,DPF}(t):=\displaystyle\lim_{dt\rightarrow0}\frac{\Pr\{\eta^\text{IF}_{t+dt}\in\mathcal{P}_\text{IF,DPF}\mid\eta^\text{IF}_{t}\in\mathcal{M}_\text{IF}\}}{dt} \end{cases} \tag{1093.6} $$
Vesely故障率をCTMCの遷移率(定数)とし、IFの故障率をSM1のカバレージ$K_\text{SM1,RF}$で分割すれば、 $$ \begin{cases} \lambda_\text{v,IF,SPF}(t)=\lambda_\text{IF,SPF}=(1-K_\text{SM1,RF})\lambda_\text{IF},\\ \lambda_\text{v,IF,DPF}(t)=\lambda_\text{IF,DPF}=K_\text{SM1,RF}\lambda_\text{IF} \end{cases} \tag{1093.7} $$ となります。ただし、Kパラメータの記法は規格第2版を踏襲し、オウナ記法としています。例えば、$K_\text{SM1,RF}$はSM1が持つ、IFに対する診断カバレージと読みます。
本稿はRAMS 2027に投稿予定であるため、重要な数式を一部秘匿しています。

2027年1月25日から米国フロリダ州セントピーターズバーグのヒルトンホテルで開催される予定のRAMS 2027(73rd Annual Reliability and Maintainability Symposium)に、弊社代表が投稿した論文のアブストラクトが採択されたとの連絡が届きました。 論文テーマは過去にブログ記事で取り上げたPMHF式の簡略化誤りに関するもので、この誤りはどうやらPFHの影響によるもののようです。そのため、PMHFとPFHを確率論から導出し、その差を検討するものです。
さらに以下の記事でも同様の誤りを取り上げています。
- https://fs-micro.com/post/show/id/324.html
- https://fs-micro.com/post/show/id/325.html
- https://fs-micro.com/post/show/id/326.html
まだアブストラクトの採択ですが、正式採択されればRAMSとしては8年連続、IEEEとしては9回目の採択となります。正式採択に向け、7月末の締め切りまでに論文をブラッシュアップしていくことになります。
表1084.1はRAMS 2027正式採択までのマイルストーンであり、今後適宜更新します。
| 期限 | マイルストーン | 状態 |
|---|---|---|
| 2026/4/30 | アブストラクト投稿締め切り(システム入力) | 済 |
| 2026/6/2 | アブストラクト採択結果 | 採択済 |
| 2026/7/31 | 初稿論文、プレゼン投稿締め切り(氏名、所属無し版) | |
| 2026/9/30 | 最終論文、プレゼン投稿締め切り(氏名、所属有り版) | |
| 2026/10/10 | 学会出席登録締め切り |
|
21 |
PMHFの簡易導出 (3) |
論理式だけによるIFRのPMHF式導出
前回までに、IFUの場合のVSG事象は、SPF/RF枝とSM1先行のDPF枝に分解できることを示しました。今回は、IFが修理されるIFR、IF repairableの場合を扱います。
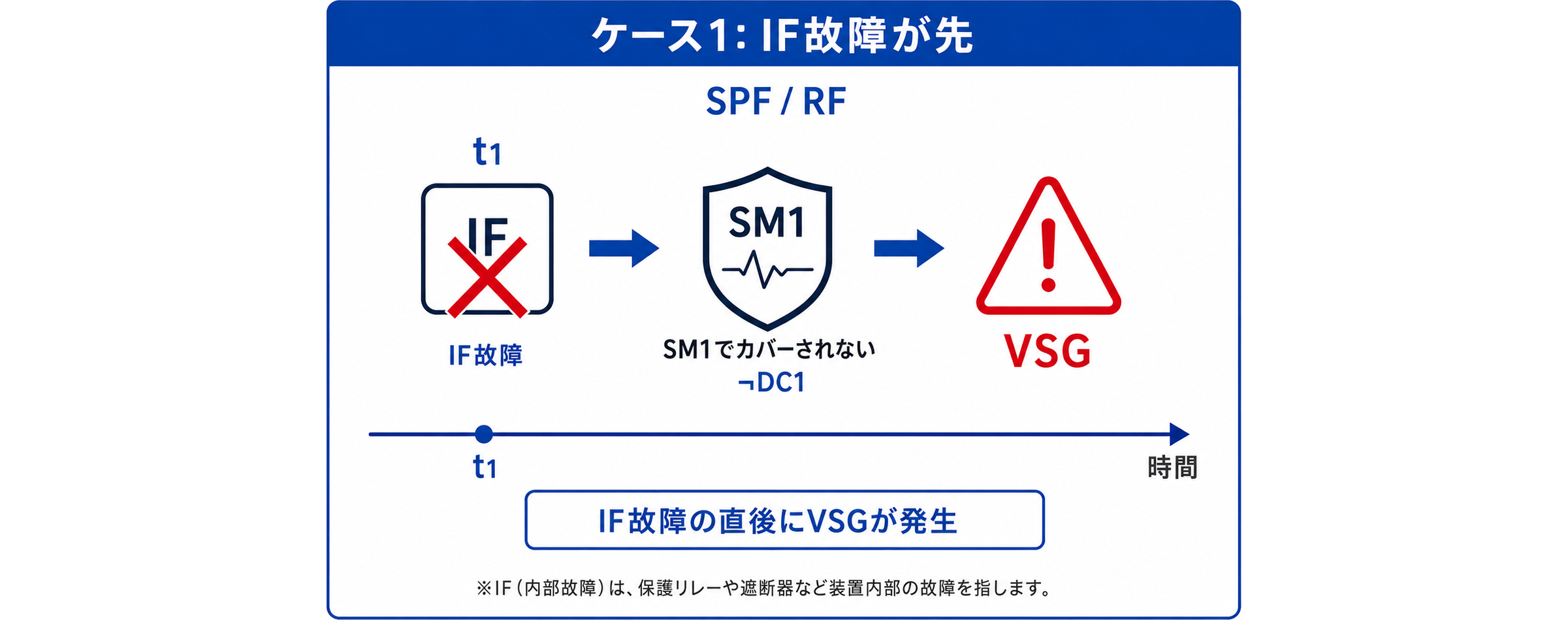
IFRでも、SPF/RF枝はIFUと同じです。IF故障がSM1のカバレッジ外にある場合、そのIF故障だけでVSGに至るため、IFが修理可能かどうかは関係しません。
$$ \{VSG_\text{SPF/RF}\}\equiv\{\overline{IF}\cap\overline{DC_1}\} \tag{1082.1} $$
一方、IFRでは、IFUでPMHF寄与を0として扱った枝が新たに現れます。それは、IF故障が先に発生し、その後にSM1故障が発生する枝です。
IF故障がSM1のカバレッジ内にある場合、SM1が正常であればVSGは抑止されます。しかし、IFが修理されるまでの間にSM1が故障すると、IF故障とSM1故障の組合せによりVSGに至ります。したがって、IFRでは、IF故障が先に発生し、その後にSM1故障が発生する枝がDPFとして追加されます。
$$ \{VSG_{\text{IF}\prec\text{SM}}\}\equiv\{(\overline{IF}\cap DC_1)\prec\overline{SM}\} \tag{1082.2} $$
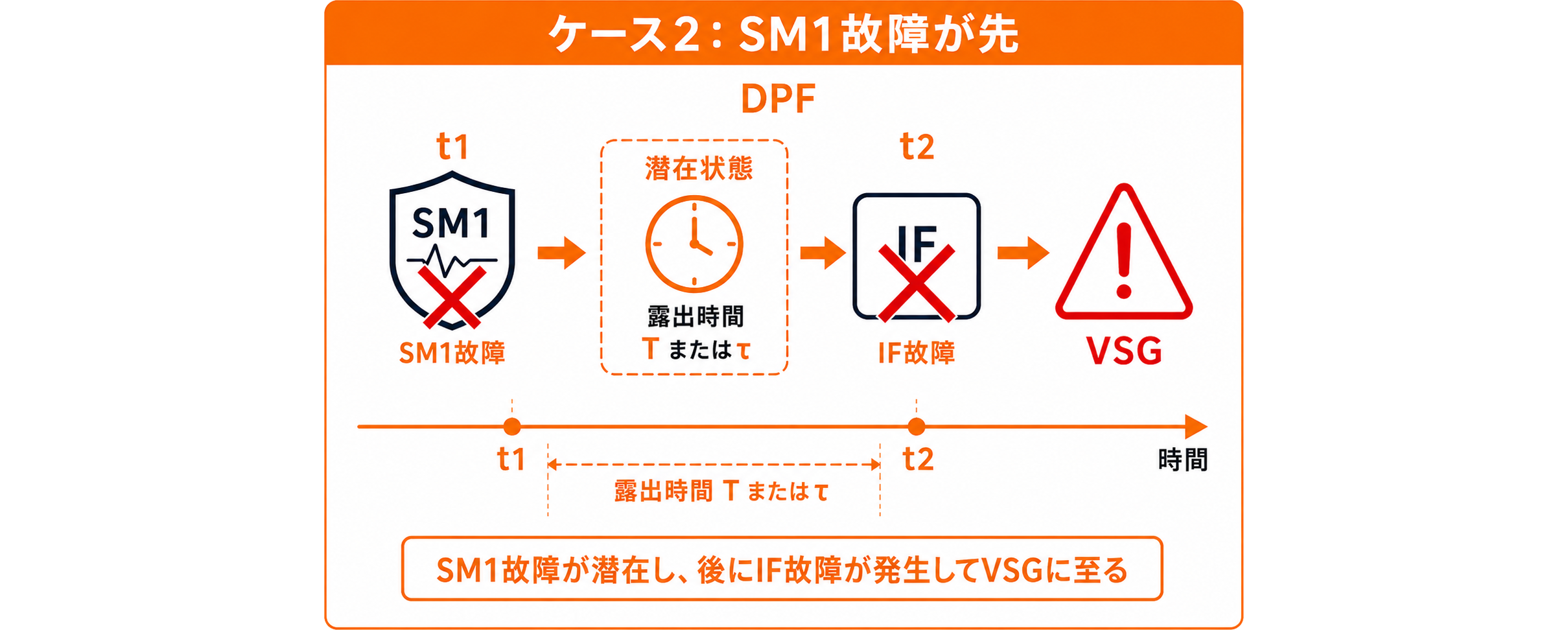
これに対して、SM1故障が先に発生し、その後にIF故障が発生する枝は、IFUの場合と同じです。
$$ \{VSG_{\text{SM}\prec\text{IF}}\}\equiv\{\overline{SM}\prec(\overline{IF}\cap DC_1)\} \tag{1082.3} $$
したがって、IFRの場合のVSG事象は、次の3つの排反事象として表されます。
$$ \begin{eqnarray} \{VSG_\text{IFR}\} &=& \{VSG_\text{SPF/RF}\} \sqcup \{VSG_{\text{SM}\prec\text{IF}}\} \sqcup \{VSG_{\text{IF}\prec\text{SM}}\} \end{eqnarray} \tag{1082.4} $$
ここで、SM1先行枝はIFUの場合と同じく、SM1故障の暴露時間により2つに分かれます。
$$ \begin{eqnarray} \left\{ \begin{array}{l} \{VSG_{\text{SM}\prec\text{IF,lat}}\} \equiv \{(\overline{SM}\cap\overline{DC_2})\prec_T(\overline{IF}\cap DC_1)\}\\ \{VSG_{\text{SM}\prec\text{IF,det}}\} \equiv \{(\overline{SM}\cap DC_2)\prec_\tau(\overline{IF}\cap DC_1)\} \end{array} \right. \end{eqnarray} \tag{1082.5} $$
第1枝ではSM1故障がSM2により検出されないため、暴露時間は$T$です。第2枝ではSM1故障がSM2により検出または修理されるため、暴露時間は$\tau$です。
次に、IF先行枝を考えます。ここでは、IF故障が修理または除去されるまでの暴露時間が問題になります。そこで、$DC_\text{IF}$を、IF故障の暴露時間を$T$から$\tau$へ短縮する診断または修理側のカバレッジとして導入します。
$$ \begin{eqnarray} \left\{ \begin{array}{l} \{VSG_{\text{IF}\prec\text{SM,lat}}\} \equiv \{(\overline{IF}\cap DC_1\cap\overline{DC_\text{IF}})\prec_T\overline{SM}\}\\ \{VSG_{\text{IF}\prec\text{SM,det}}\} \equiv \{(\overline{IF}\cap DC_1\cap DC_\text{IF})\prec_\tau\overline{SM}\} \end{array} \right. \end{eqnarray} \tag{1082.6} $$
第1枝ではIF故障が修理されず、暴露時間は$T$です。第2枝ではIF故障が修理対象となり、暴露時間は$\tau$です。したがって、IFRでは、SM1故障の暴露時間だけでなく、IF故障の暴露時間もPMHFに現れます。
ここから、各枝をレアイベント近似で確率へ変換します。まず、SPF/RF枝はIFUの場合と同じです。
$$ \begin{eqnarray} PMHF_\text{SPF/RF}(T) &=&\frac{1}{T}\Pr\{VSG_\text{SPF/RF}\}\\ &=&\frac{1}{T}\Pr\{\overline{IF}\cap\overline{DC_1}\}\\ &\approx&\frac{1}{T}(1-DC_1)\lambda_\text{IF}T\\ &=&(1-DC_1)\lambda_\text{IF} \end{eqnarray} \tag{1082.7} $$
SM1先行枝の寄与も、IFUの場合と同じです。
$$ \begin{eqnarray} PMHF_{\text{SM}\prec\text{IF}}(T) &\approx& \frac{1}{2}DC_1\lambda_\text{IF}\lambda_\text{SM} \{(1-DC_2)T+DC_2\tau\} \end{eqnarray} \tag{1082.8} $$
次に、IF先行枝の寄与を求めます。IF故障が先に発生し、その後にSM1故障が発生する順序付き二重故障であるため、同じく係数$\frac{1}{2}$が付きます。
$$ \begin{eqnarray} PMHF_{\text{IF}\prec\text{SM}}(T) &\approx& \frac{1}{2}DC_1\lambda_\text{IF}\lambda_\text{SM} \{(1-DC_\text{IF})T+DC_\text{IF}\tau\} \end{eqnarray} \tag{1082.9} $$
したがって、IFRの場合のPMHFは、SPF/RF枝、SM1先行DPF枝、IF先行DPF枝の和として得られます。
$$ \begin{eqnarray} PMHF_\text{IFR}(T) &\approx& PMHF_\text{SPF/RF}(T)+PMHF_{\text{SM}\prec\text{IF}}(T)+PMHF_{\text{IF}\prec\text{SM}}(T)\\ &\approx& (1-DC_1)\lambda_\text{IF}\\ &&+\frac{1}{2}DC_1\lambda_\text{IF}\lambda_\text{SM} \{(1-DC_2)T+DC_2\tau\}\\ &&+\frac{1}{2}DC_1\lambda_\text{IF}\lambda_\text{SM} \{(1-DC_\text{IF})T+DC_\text{IF}\tau\}\\ &=&\lambda_\text{RF}\\ &&+\frac{1}{2}\lambda_\text{IF,DPF}\lambda_\text{SM1,DPF,lat}T\\ &&+\frac{1}{2}\lambda_\text{IF,DPF}\lambda_\text{SM1,DPF,det}\tau\\ &&+\frac{1}{2}\lambda_\text{SM1,DPF}\lambda_\text{IF,DPF,lat}T\\ &&+\frac{1}{2}\lambda_\text{SM1,DPF}\lambda_\text{IF,DPF,det}\tau \end{eqnarray} \tag{1082.10} $$
最後の変形はパラメータを観測可能なパラメータに分解したものを逆に戻し、規格式と対応するようにしました。

規格式との違いは暴露時間が$\tau$の場合に0.5がかかることであり、これは過去記事で、積分範囲がスライディングウインドウになっているという規格式の誤りを指摘しています。
IFRでは、IFUのSM1先行DPF枝に加えて、IF先行DPF枝が追加されます。工学的には、IF故障がSM1のカバレッジ内にあっても、そのIF故障が修理されるまでの間にSM1故障が発生すれば、2個の故障の組合せによりVSGへ至るためです。
|
20 |
PMHFの簡易導出 (2) |
論理式だけによるIFUのPMHF式導出 その2
前回は、IF故障が発生した瞬間のVSG判定式から、VSG事象をSPF/RF枝とDPF枝に分解しました。
$$ \{VSG\}=\{VSG_\text{SPF/RF}\}\sqcup\{VSG_\text{DPF}\} \tag{1081.1} $$
ここで、$\sqcup$は排反和を表します。すなわち、2つの枝は重複せず、その和としてVSG事象を構成します。
前回得られた2つの枝は、次のように表されます。
$$ \begin{eqnarray} \left\{ \begin{array}{l} \{VSG_\text{SPF/RF}\}\equiv\{\overline{IF}\cap\overline{DC_1}\}\\ \{VSG_\text{DPF}\}\equiv\{\overline{IF}\cap DC_1\cap\overline{SM}_{\sigma_\text{IF}}\} \end{array} \right. \end{eqnarray} \tag{1081.2} $$
第1式は、IF故障がSM1のカバレッジ外にある枝です。第2式は、IF故障がSM1のカバレッジ内にあり、かつIF故障時点でSM1が故障している枝です。
ここで、$\overline{SM}_{\sigma_\text{IF}}$は、IF故障時点$\sigma_\text{IF}$においてSM1が故障状態であることを表します。連続時間では、IF故障とSM1故障が同時に発生する確率はほとんど確実に0です。したがって、IF故障時点でSM1が故障していることは、SM1故障がIF故障より前に発生していたことを意味します。
この時間順序を表すため、次の記号を導入します。
$$ A\prec_L B\Longleftrightarrow A\text{が先に発生し、その後、暴露時間}L\text{以内に}B\text{が発生する}\\ A\prec_L B\Longleftrightarrow \sigma_A<\sigma_B\le\sigma_A+L \tag{1081.3} $$
この記号により、DPF枝は次のように書き直せます。
$$ \{VSG_\text{DPF}\}\equiv\{\overline{SM}\prec_L(\overline{IF}\cap DC_1)\} \tag{1081.4} $$
(1081.4)は、SM1故障が先に発生し、その後、SM1によりVSG抑止されるはずだったIF故障が発生する枝です。この枝では、IF故障はSM1のカバレッジ内にありますが、SM1が先に故障しているため、IF故障時点でVSG抑止が成立しません。
次に、SM1故障の暴露時間を考えます。SM1故障がSM2により検出または修理されるかどうかにより、暴露時間は変わります。
SM2により検出されない場合、SM1故障は寿命$T$の間に潜在し得ます。一方、SM2により検出または修理される場合、SM1故障の暴露時間は点検間隔$\tau$に制限されます。
したがって、DPF枝は次の2つの排反事象に分解されます。
$$ \begin{eqnarray} \left\{ \begin{array}{l} \{VSG_\text{DPF}\}=\{VSG_\text{MPF,lat}\}\sqcup\{VSG_\text{MPF,det}\}\\ \{VSG_\text{MPF,lat}\}\equiv\{(\overline{SM}\cap\overline{DC_2})\prec_T(\overline{IF}\cap DC_1)\}\\ \{VSG_\text{MPF,det}\}\equiv\{(\overline{SM}\cap DC_2)\prec_\tau(\overline{IF}\cap DC_1)\} \end{array} \right. \end{eqnarray} \tag{1081.5} $$
第1枝は、SM1故障がSM2により検出されない枝です。この枝では、暴露時間は$T$です。第2枝は、SM1故障がSM2により検出または修理される枝です。この枝では、暴露時間は$\tau$です。
ここから、各枝の確率をレアイベント近似で求めます。故障率$\lambda_X$を持つエレメント$X$が時間$L$内に故障する確率を、次のように近似します。
$$ \Pr\{\overline{X}\text{ in }L\}\approx\lambda_XL \tag{1081.6} $$
また、独立な2つの故障$A$と$B$について、時間$L$内で両方が発生する場合、$A$が先で$B$が後となる順序は、全体の半分として扱えます。
$$ \Pr\{A\prec_LB\}\approx\frac{1}{2}\Pr\{A\text{ in }L\}\Pr\{B\text{ in }L\} \tag{1081.7} $$
まず、SPF/RF枝を求めます。この枝では、IF故障がSM1のカバレッジ外にあります。
$$ \begin{eqnarray} \{VSG_\text{SPF/RF}\} &\equiv& \{\overline{IF}\cap\overline{DC_1}\}\\ PMHF_\text{SPF/RF}(T) &=&\frac{1}{T}\Pr\{VSG_\text{SPF/RF}\}\\ &=&\frac{1}{T}\Pr\{\overline{IF}\cap\overline{DC_1}\}\\ &\approx&\frac{1}{T}(1-DC_1)\lambda_\text{IF}T\\ &=&(1-DC_1)\lambda_\text{IF} \end{eqnarray} \tag{1081.8} $$
次に、MPF latent枝を求めます。この枝では、SM1故障がSM2により検出されず、暴露時間は$T$です。したがって、SM1故障が先に発生し、その後にIF故障が発生する順序付き二重故障として、次のようになります。
$$ \begin{eqnarray} \{VSG_\text{MPF,lat}\} &\equiv& \{(\overline{SM}\cap\overline{DC_2})\prec_T(\overline{IF}\cap DC_1)\}\\ PMHF_\text{MPF,lat}(T) &=&\frac{1}{T}\Pr\{VSG_\text{MPF,lat}\}\\ &\approx&\frac{1}{T}\cdot\frac{1}{2}(1-DC_2)\lambda_\text{SM}T\cdot DC_1\lambda_\text{IF}T\\ &=&\frac{1}{2}DC_1\lambda_\text{IF}\lambda_\text{SM}(1-DC_2)T \end{eqnarray} \tag{1081.9} $$
次に、MPF detected枝を求めます。この枝では、SM1故障がSM2により検出または修理されるため、暴露時間は$\tau$です。
$$ \begin{eqnarray} \{VSG_\text{MPF,det}\} &\equiv& \{(\overline{SM}\cap DC_2)\prec_\tau(\overline{IF}\cap DC_1)\}\\ PMHF_\text{MPF,det}(T) &=&\frac{1}{T}\Pr\{VSG_\text{MPF,det}\}\\ &\approx&\frac{1}{T}\cdot\frac{1}{2}DC_2\lambda_\text{SM}T\cdot DC_1\lambda_\text{IF}\tau\\ &=&\frac{1}{2}DC_1\lambda_\text{IF}\lambda_\text{SM}DC_2\tau \end{eqnarray} \tag{1081.10} $$
以上より、IFUの場合のPMHFは、SPF/RF枝、MPF latent枝、MPF detected枝の和として得られます。
$$ \begin{eqnarray} PMHF_\text{IFU}(T) &\approx&PMHF_\text{SPF/RF}(T)+PMHF_\text{MPF,lat}(T)+PMHF_\text{MPF,det}(T)\\ &\approx&(1-DC_1)\lambda_\text{IF} +\frac{1}{2}DC_1\lambda_\text{IF}\lambda_\text{SM}(1-DC_2)T +\frac{1}{2}DC_1\lambda_\text{IF}\lambda_\text{SM}DC_2\tau\\ &=&(1-DC_1)\lambda_\text{IF} +\frac{1}{2}DC_1\lambda_\text{IF}\lambda_\text{SM}\{(1-DC_2)T+DC_2\tau\} \end{eqnarray} \tag{1081.11} $$
最後に、規格の記法に合わせて、$DC_1=K_{\text{SM1,RF}}$、$DC_2=K_{\text{SM2,DPF}}$と置きます。
$$ \begin{eqnarray} PMHF_\text{IFU}(T) &\approx& (1-K_{\text{SM1,RF}})\lambda_\text{IF}\\ &&+\frac{1}{2}K_{\text{SM1,RF}}\lambda_\text{IF}\lambda_\text{SM} \{(1-K_{\text{SM2,DPF}})T+K_{\text{SM2,DPF}}\tau\} \end{eqnarray} \tag{1081.12} $$
これにより、IFUの場合のPMHF式が得られました。
この導出では、まずVSGをSPF/RF枝とDPF枝に分解し、次にDPF枝を暴露時間$T$の枝と$\tau$の枝に分解しました。その結果、$DC_1$はIF故障がSM1によりVSG抑止される範囲を表し、$DC_2$はSM1故障の暴露時間を$T$から$\tau$へ短縮する割合として現れます。
|
19 |
PMHFの簡易導出 |
論理式だけによるIFUのPMHF式導出 その1
PMHF式は、故障シナリオを工学的に分解することでも導くことができます。ここでは、IFが修理されないIFU、IF unrepairableの場合を扱います。
$\overline{IF}$をIFの故障、$\overline{SM}$をSM1の故障とします。$DC_1$は、IF故障がSM1のカバレッジ内にある事象を表します。
まず、IF故障が発生した瞬間のVSG判定式を置きます。IF故障は、SM1が正常に動作し、かつそのIF故障がSM1のカバレッジ内にある場合にだけVSG抑止されます。したがって、VSGは次のように表されます。
$$ \{VSG\}=\{\overline{IF}\setminus(SM_{\sigma_\text{IF}}\cap DC_1)\} \tag{1080.1} $$
ここで、$SM_{\sigma_\text{IF}}$は、IF故障時点でSM1が正常であることを表します。したがって、(1080.1)は、IF故障から、IF故障時点でSM1によりVSG抑止される部分を除いた式です。
まず、差集合を積集合に変換し、さらにド・モルガンの法則を用います。
$$ \begin{eqnarray} \{VSG\}&=&\{\overline{IF}\cap\overline{(SM_{\sigma_\text{IF}}\cap DC_1)}\}\\ &=&\{\overline{IF}\cap(\overline{SM}_{\sigma_\text{IF}}\cup\overline{DC_1})\} \end{eqnarray} \tag{1080.2} $$
(1080.2)は、IF故障時点で、SM1が故障しているか、またはIF故障がSM1のカバレッジ外であればVSGになることを表します。
次に、(1080.2)の右辺に現れる条件$\overline{SM}_{\sigma_\text{IF}}\cup\overline{DC_1}$をMECEに分解します。
$$ \begin{eqnarray} \overline{SM}_{\sigma_\text{IF}}\cup\overline{DC_1} &=&(\overline{SM}_{\sigma_\text{IF}}\cap\overline{DC_1}) \sqcup (\overline{SM}_{\sigma_\text{IF}}\cap DC_1) \sqcup (SM_{\sigma_\text{IF}}\cap\overline{DC_1}) \end{eqnarray} \tag{1080.3} $$
この分解は、VSGになる条件だけを3通りに分けたものです。
1つ目は、IF故障時点でSM1が故障しており、かつIF故障がSM1のカバレッジ外にある場合です。
2つ目は、IF故障時点でSM1が故障しており、かつIF故障がSM1のカバレッジ内にある場合です。
3つ目は、IF故障時点でSM1は正常であり、かつIF故障がSM1のカバレッジ外にある場合です。
したがって、VSG事象は次の3つの排反事象に分かれます。
$$ \begin{eqnarray} \{VSG\} &=&\{\overline{IF}\cap\overline{SM}_{\sigma_\text{IF}}\cap\overline{DC_1}\} \sqcup \{\overline{IF}\cap\overline{SM}_{\sigma_\text{IF}}\cap DC_1\}\\ &&\sqcup \{\overline{IF}\cap SM_{\sigma_\text{IF}}\cap\overline{DC_1}\} \end{eqnarray} \tag{1080.4} $$
ここで、VSGになる3つの枝を故障分類の観点で整理します。
まず、(1080.4)の第1項と第3項は、どちらもIF故障がSM1のカバレッジ外にある枝です。第1項ではSM1も故障していますが、IF故障がカバレッジ外であるため、SM1が正常であってもVSGに至ります。したがって、この2つはSPFまたはRF側にまとめられます。
$$ \begin{eqnarray} \{\overline{IF}\cap\overline{SM}_{\sigma_\text{IF}}\cap\overline{DC_1}\} \sqcup \{\overline{IF}\cap SM_{\sigma_\text{IF}}\cap\overline{DC_1}\} &=&\{\overline{IF}\cap\overline{DC_1}\cap(\overline{SM}_{\sigma_\text{IF}}\sqcup SM_{\sigma_\text{IF}})\}\\ &=&\{\overline{IF}\cap\overline{DC_1}\}\equiv\{VSG_\text{SPF/RF}\} \end{eqnarray} \tag{1080.5} $$
SPF/RF側の条件は、IF故障がSM1のカバレッジ外にあることです。したがって、(1080.4)の第1項と第3項は、SM1の状態にかかわらず、そのIF故障だけでVSGに至るSPFまたはRF側の枝としてまとめられます。
一方、(1080.4)の第2項は、IF故障がSM1のカバレッジ内であり、かつIF故障時点でSM1が故障している枝です。
$$ \{\overline{IF}\cap DC_1\cap\overline{SM}_{\sigma_\text{IF}}\}\equiv\{VSG_\text{DPF}\} \tag{1080.6} $$
DPF側の条件は、IF故障がSM1のカバレッジ内にあり、かつIF故障時点でSM1が故障していることです。これは、IF故障とSM1故障の組合せによりVSGに至る枝であり、MPFのうち2個の故障によるDPFに対応します。
以上より、VSG事象は、最終的に次の2つの排反事象に整理されます。
$$ \{VSG\}=\{VSG_\text{SPF/RF}\}\sqcup\{VSG_\text{DPF}\} \tag{1080.7} $$
ここまでで、VSG事象はSPF/RF枝とDPF枝に排反分解されました。次回は、DPF枝に含まれる$\overline{SM}_{\sigma_\text{IF}}$の意味を時間順序として表し、さらに暴露時間により分解します。
|
17 |
Tower property |
$X$が確率変数、$Y$が可積分確率変数であるとき、期待値のTower property $$\mathbb E\{\mathbb E\{Y\mid X\}\} = \mathbb E\{Y\}$$ の証明を離散と連続を対応させて書くと、次のようになります。
離散の場合
$$\mathbb E\{\mathbb E\{Y\mid X\}\} = \sum_x \mathbb E\{Y\mid X=x\}\,\Pr\{X=x\}$$ ここで、 $$\mathbb E\{Y\mid X=x\} = \sum_y y\,\Pr\{Y=y\mid X=x\}$$ なので、 $$\begin{aligned} \mathbb E\{\mathbb E\{Y\mid X\}\} &= \sum_x \left[ \sum_y y\,\Pr\{Y=y\mid X=x\} \right] \Pr\{X=x\} \\ &= \sum_x\sum_y y\,\Pr\{Y=y\mid X=x\}\Pr\{X=x\} \\ &= \sum_x\sum_y y\,\Pr\{X=x,Y=y\} \\ &= \mathbb E\{Y\}. \end{aligned}$$ 最後の変形は、 $$\Pr\{Y=y\mid X=x\}\Pr\{X=x\}=\Pr\{X=x,Y=y\}$$ を使っています。
連続の場合
$$\mathbb E\{\mathbb E\{Y\mid X\}\} = \int_{-\infty}^{\infty} \mathbb E\{Y\mid X=x\}\,f_X(x)\,dx$$ ここで、 $$\mathbb E\{Y\mid X=x\}= \int_{-\infty}^{\infty} y\,f_{Y\mid X=x}(y)\,dy$$ なので、 $$\begin{aligned} \mathbb E\{\mathbb E\{Y\mid X\}\} &= \int_{-\infty}^{\infty} \left[ \int_{-\infty}^{\infty} y\,f_{Y\mid X=x}(y)\,dy \right] f_X(x)\,dx \\ &= \int_{-\infty}^{\infty} \int_{-\infty}^{\infty} y\,f_{Y\mid X=x}(y)f_X(x)\,dy\,dx \\ &= \int_{-\infty}^{\infty} \int_{-\infty}^{\infty} y\,f_{X,Y}(x,y)\,dy\,dx \\ &= \mathbb E\{Y\}. \end{aligned}$$ 最後の変形は、 $$f_{Y\mid X=x}(y)f_X(x)=f_{X,Y}(x,y)$$ を使っています。
対応表
$$\begin{array}{c|c} \text{離散} & \text{連続} \\ \hline \sum_x & \int dx \\ \Pr\{X=x\} & f_X(x)\,dx \\ \Pr\{Y=y\mid X=x\} & f_{Y\mid X=x}(y)\,dy \\ \Pr\{X=x,Y=y\} & f_{X,Y}(x,y)\,dx\,dy \\ \sum_x\sum_y y\,\Pr\{X=x,Y=y\} & \int\int y\,f_{X,Y}(x,y)\,dy\,dx \end{array}$$ $f_X(x)$が確率密度であって確率でない理由は、離散の場合の $$\Pr\{X=x\}$$ に対応する連続の場合の量は、 $$f_X(x)\,dx$$ です。 したがって、連続の場合に式の中で $f_X(x)$ が出てくるのは、積分記号の $dx$ と一緒になって $$f_X(x)\,dx$$ という確率要素を作っているからです。
注意として、条件付き期待値 $\mathbb{E}\{Y\mid X\}$ は厳密には略記であり、本来は $X$ が生成する $\sigma$-field に関する条件付き期待値 $$ \mathbb{E}\{Y\mid \sigma(X)\} $$ を意味します。ここで $Y$ は可積分確率変数です。
この条件付き期待値は $\sigma(X)$-可測な確率変数であるため、ある可測関数 $g$ により $$ \mathbb{E}\{Y\mid \sigma(X)\}=g(X) $$ と表せます。
離散の場合には、$\Pr\{X=x\}>0$ であれば $$ g(x)=\mathbb{E}\{Y\mid X=x\} $$ と通常の条件付き期待値として解釈できます。
一方、連続の場合には通常 $$ \Pr\{X=x\}=0 $$ です。そのため、$\mathbb{E}\{Y\mid X=x\}$ は、事象 $\{X=x\}$ の下で条件付けた期待値ではありません。これは、上の関数 $g$ の値 $g(x)$ を表す慣用的な略記です。
密度が存在する場合には、この $g(x)$ は $$ g(x)=\int_{-\infty}^{\infty} y f_{Y\mid X=x}(y)\,dy $$ と書けます。ただし、ここでの $f_{Y\mid X=x}(y)$ も、確率ゼロの事象 $\{X=x\}$ による条件付けではなく、条件付き密度として定義されるものです。
|
27 |
PFHとPMHFの比較 (7) |
同じ IF/SM サブシステムアーキテクチャにおける $w_\text{VSG}(t)$ の導出
前稿では、PMHF 側の VSG 初回到達密度 $f_\text{VSG}(t)$ を導出しました。本稿では、同じ IF と SM から成る非冗長サブシステムアーキテクチャの上で、PFH 側の VSG 発生頻度 $w_\text{VSG}(t)$ を導出します。
PFH では、VSG の初回発生だけではなく、観測区間内に発生する VSG の全発生回数を数えます。したがって、VSG 計数過程 $(N_t^\text{VSG})_{t\ge0}$ に対して、時刻 $t$ における VSG 発生頻度 $w_\text{VSG}(t)$ を
$$ E\{N_{t+dt}^\text{VSG}-N_t^\text{VSG}\} =w_\text{VSG}(t)dt+o(dt) \tag{1077.1} $$
と定義します。
PMHF 側では $N_t^\text{VSG}=0$ という初回到達条件が入りました。一方、PFH 側ではこの条件を付けません。そのため、時刻 $t$ における IF および SM の状態から、次の微小時間 $dt$ における VSG 発生を数えます。
PFH 側では IF を repairable process として扱うため、IF が時刻 $t$ に稼働集合にある確率を
$$ A_\text{IF}(t)=\Pr\{\eta_t^\text{IF}\in\mathcal M_\text{IF}\}, \qquad U_\text{SM}(t)=\Pr\{\eta_t^\text{SM}\in\mathcal P_\text{SM}\} \tag{1077.2} $$
と表します。ここで、$A_\text{IF}(t)$ は IF の availability、$U_\text{SM}(t)$ は SM が潜在故障集合にある確率です。
まず、状態過程から得られる一般形を導出します。SPF 項について、時刻 $t$ に IF が稼働集合にあり、その後の微小時間 $dt$ の間に IF の SPF 側故障によって VSG が発生する確率は
$$ \Pr\{\eta_t^\text{IF}\in\mathcal M_\text{IF}, \eta_{t+dt}^\text{IF}\in\mathcal P_\text{IF,SPF}\}\\ =\Pr\{\eta_t^\text{IF}\in\mathcal M_\text{IF}\} \Pr\{\eta_{t+dt}^\text{IF}\in\mathcal P_\text{IF,SPF} \mid \eta_t^\text{IF}\in\mathcal M_\text{IF}\}\\ =A_\text{IF}(t)\lambda_{v,\text{IF,SPF}}(t)dt+o(dt) \tag{1077.3} $$
です。したがって、状態過程から得られる PFH 側の SPF 発生頻度は
$$ w_\text{SPF}^{\text{gen}}(t) =A_\text{IF}(t)\lambda_{v,\text{IF,SPF}}(t) \tag{1077.4} $$
となります。
同様に DPF 項について、時刻 $t$ に SM が潜在故障集合にあり、かつ IF が稼働集合にあるとき、その後の微小時間 $dt$ の間に IF の DPF 側故障によって VSG が発生する確率は、IF fault と SM fault の独立性より
$$ \Pr\{\eta_t^\text{SM}\in\mathcal P_\text{SM}, \eta_t^\text{IF}\in\mathcal M_\text{IF}, \eta_{t+dt}^\text{IF}\in\mathcal P_\text{IF,DPF}\}\\ =\Pr\{\eta_t^\text{SM}\in\mathcal P_\text{SM}\} \Pr\{\eta_t^\text{IF}\in\mathcal M_\text{IF}, \eta_{t+dt}^\text{IF}\in\mathcal P_\text{IF,DPF}\}\\ =U_\text{SM}(t)A_\text{IF}(t)\lambda_{v,\text{IF,DPF}}(t)dt+o(dt) \tag{1077.5} $$
です。したがって、状態過程から得られる PFH 側の DPF 発生頻度は
$$ w_\text{DPF}^{\text{gen}}(t) =U_\text{SM}(t)A_\text{IF}(t)\lambda_{v,\text{IF,DPF}}(t) \tag{1077.6} $$
となります。
よって、状態過程から得られる PFH 側の VSG 発生頻度は
$$ w_\text{VSG}^{\text{gen}}(t) =w_\text{SPF}^{\text{gen}}(t)+w_\text{DPF}^{\text{gen}}(t)\\ =A_\text{IF}(t) \{\lambda_{v,\text{IF,SPF}}(t) +U_\text{SM}(t)\lambda_{v,\text{IF,DPF}}(t)\} \tag{1077.7} $$
です。
一方、標準的な PFH 簡略式との比較では、状態依存の一般形 $w_\text{VSG}^{\text{gen}}(t)$ ではなく、定数故障率パラメータによる reduced representation を用います。この標準簡略形を
$$ w_\text{VSG}^{\text{std}}(t) \approx \lambda_{\text{IF,SPF}} +U_\text{SM}(t)\lambda_{\text{IF,DPF}} \tag{1077.8} $$
と表します。ここで、$w_\text{VSG}^{\text{std}}(t)$ は $w_\text{VSG}^{\text{gen}}(t)$ の恒等変形ではありません。$A_\text{IF}(t)\lambda_{v,\text{IF}}(t)=\lambda_\text{IF}$ と仮定しているのではなく、標準 PFH 簡略式で用いられる定数故障率パラメータによる reduced representation を別途導入しています。
式 (1077.9) の簡略形でも、$U_\text{SM}(t)\lambda_{\text{IF,DPF}}$ は、SM が潜在故障状態にあるときに IF の DPF 側故障が発生するシナリオを表しています。省略されているのは、SM の潜在故障ではなく、IF 側の availability factor $A_\text{IF}(t)$ および Vesely 故障率の状態依存性です。
前稿で導出した PMHF 側の VSG 初回到達密度は
$$ f_\text{VSG}(t) =R_\text{IF}(t)\left(\lambda_{\text{IF,SPF}}+U_\text{SM}(t)\lambda_{\text{IF,DPF}}\right) \tag{1077.9} $$
でした。これに対し、PFH 側の一般形では $N_t^\text{VSG}=0$ という初回到達条件が入らないため、$R_\text{IF}(t)$ ではなく $A_\text{IF}(t)$ が現れ、さらに時刻 $t$ の状態に依存する Vesely 故障率が現れます。一方、標準 PFH 簡略式では、それらを陽に扱わない reduced representation として式 (1077.9) を用います。
以上より、同じ IF/SM サブシステムアーキテクチャにおいても、PMHF 側の $f_\text{VSG}(t)$ と PFH 側の発生頻度は一般には一致しません。PFH 側では、時刻 $t$ の状態からの VSG 発生を計数過程として数えるため、初回到達条件を含まないことが本質的な違いです。
本稿はRAMS 2027に投稿予定であるため、重要な数式を一部秘匿しています。
ページ:
