|
11 |
PUA関連論文Hokstad1997 |
PUA関連論文シリーズ最後は以下の論文です。
P. Hokstad, “The Failure Intensity Process and the Formulation of Reliability and Maintenance Models,” Rel. Eng. Syst. Safety, vol. 58, no. 1, pp 69–82, (Oct.) 1997.
以降翻訳はDeepLによるものです。まずアブストラクトを示します。
故障事象モデルの定式化に対する統一的なアプローチを示す。これは、修理可能なものと修理不可能なもの、予防保全と是正保全の両方を分析するための共通の枠組みを提供するものであり、休止故障のあるものにも適用できる。提案された手順は、一連のグラフによってサポートされ、それによって、固有の信頼性(すなわち、ハザード率)と保守・修理方針の両方の重要性を明らかにする。様々な故障強度の概念の定義/解釈は、このアプローチの基本である。したがって、これらの強度間の相互関係を検討し、それによってこれらの概念の明確化にも貢献する。これらの概念の中で最も基本的なものである故障強度過程は、計数過程(マーチンゲール)で使用されるものであり、その時点までの品目の履歴が与えられた時点tにおける故障率である。提案するアプローチは、いくつかの標準的な信頼性とメンテナンスのモデルを考えることによって説明される。
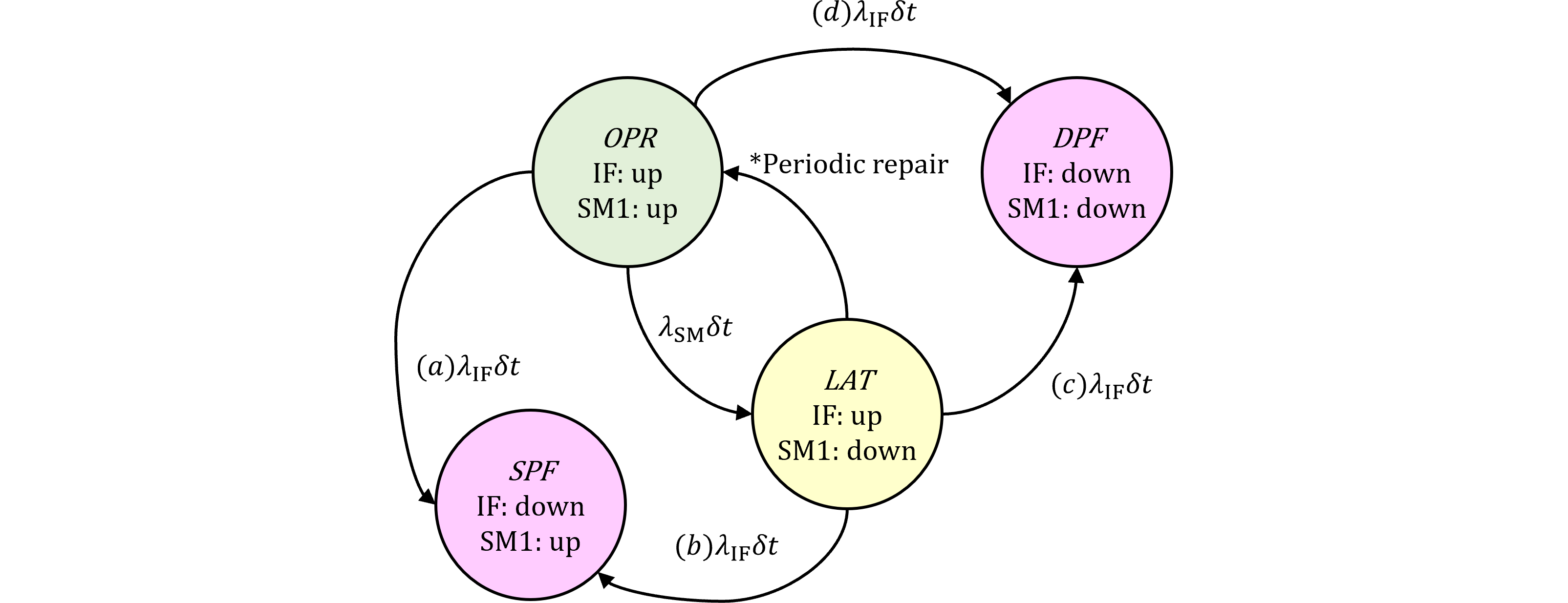
いろいろな不稼働度モデルが紹介されていますが、我々の関心があるのは定期検査を持つModel Dと呼ばれるモデルです。
Model D (休眠故障と定期的なテストを伴うアイテム)
一方、著者によれば、様々な確率過程は以下の定義となります。
| 系 | 関数名 | 関数 | 系 | 論文関数名 | 論文関数 | 我々の関数名 | 我々の関数 |
|---|---|---|---|---|---|---|---|
| 非修理系 | reliability | $R(t)$ | 修理系 | availability | $A(t)$ | availability | $A(t)$ |
| PDF (probability density function) | $f(t)$ | failure intensity, mean intensity, unconditional intensity, ROCOF(Rate of OCcurrence Of Failure) |
$I(t)$ | PUD (point unavailability density) | $q(t)$ | ||
| CDF (cumulative distribution function) | $F(t)$ | mean number of failure, cumulative intensity |
$M(t)$ | PUA (point unavailability) | $Q(t)$ | ||
| hazard rate | $\lambda(t)$ | conditional intensity | $I_{up}(t)$ | Veseley's failure rate | $\lambda_v(t)$ |
Average intensity、もしくはAROCOF (Average Rate of OCcurrence Of Failure)は、 $$ i_\tau=\frac{1}{\tau}\int_0^\tau I(t)dt=\frac{1}{\tau}M(\tau) $$ 我々の定義では、$I(t)$は$q(t)$と、$M(t)$は$Q(t)$と定義します。元になる非修理系において一般的な記法であるPDF=$f(t)$、その積分であるCDF=$F(t)$を踏襲するなら$i$や$I$の大文字小文字は逆にして欲しかったところです。
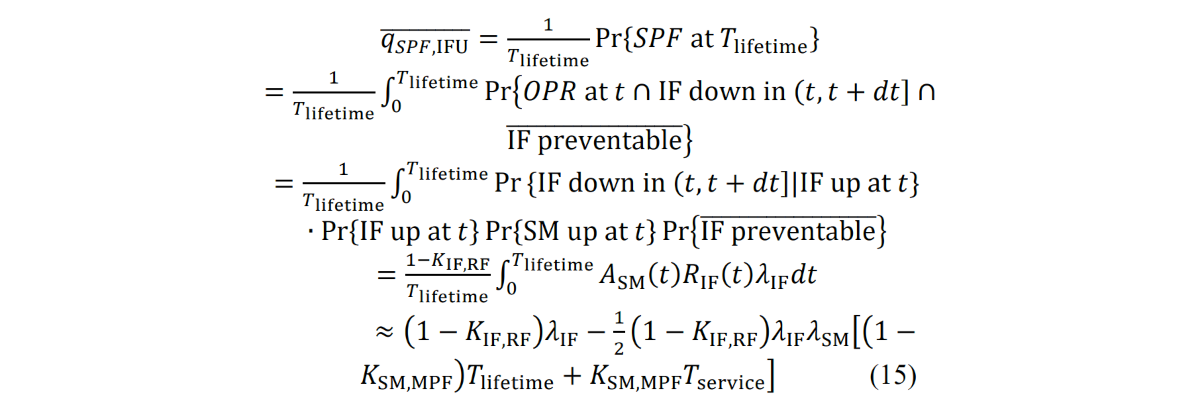
我々は特に車両寿命間の平均PUDが知りたいため、PFHも同様の定義ですが、 $$ M_\text{PMHF}=\frac{1}{T_\text{lifetime}}\int_0^{T_\text{lifetime}} q(t)dt=\frac{1}{T_\text{lifetime}}Q(T_\text{lifetime})=i_{T_\text{lifetime}} $$ が求めたい平均不稼働密度です。