LAT2⇒DPFの平均PUDの計算
LAT2⇒DPFの遷移(c)の平均PUDを計算します。
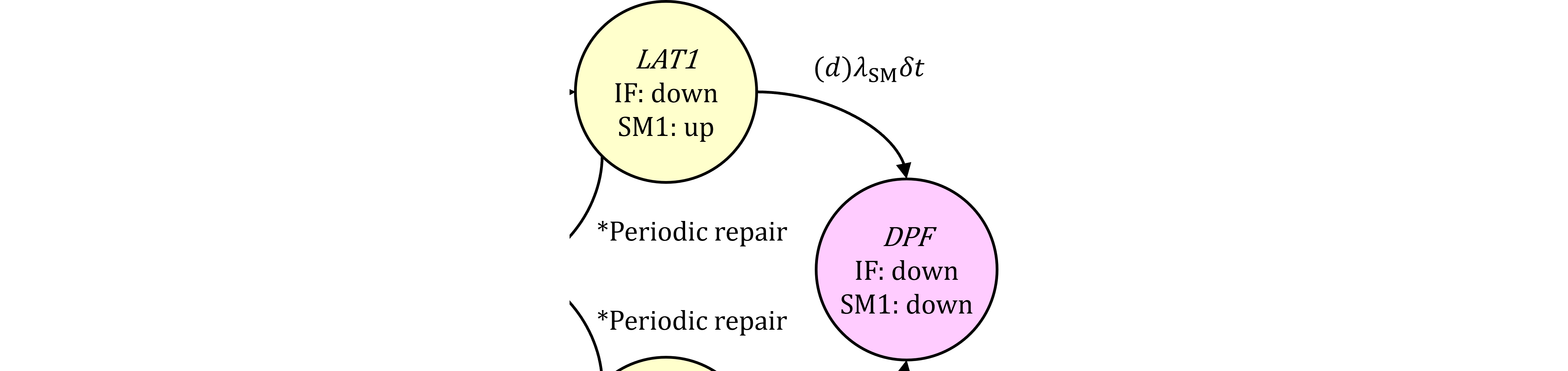
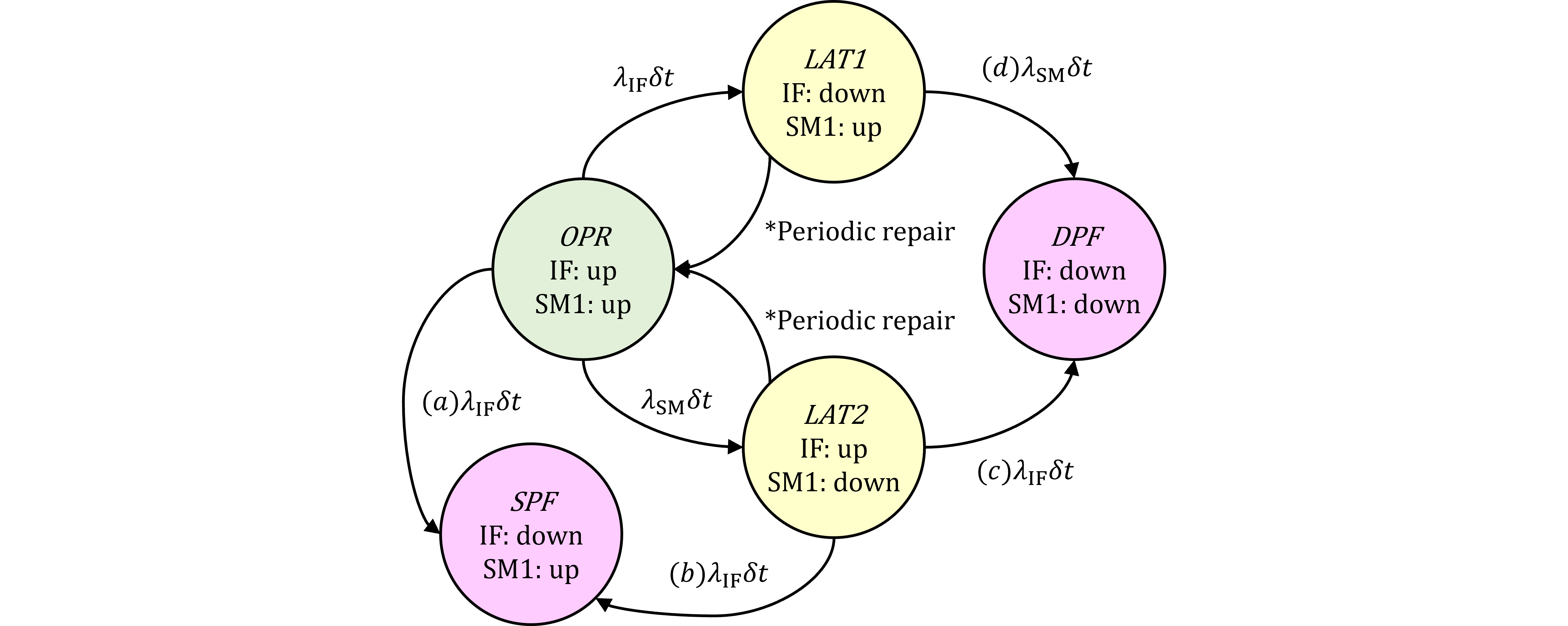
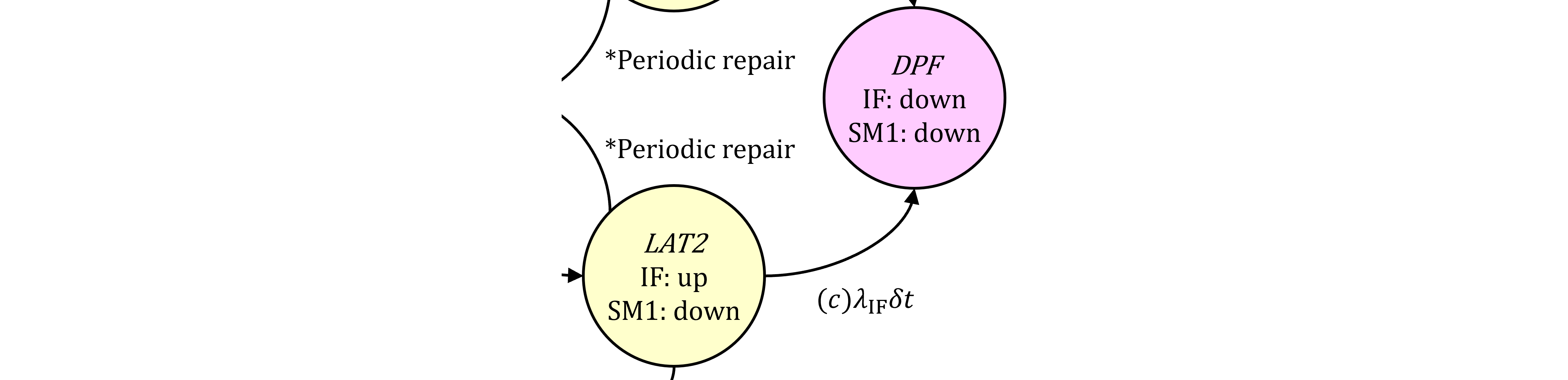 図1088.1 LAT2⇒DPF1の遷移(c)
図1088.1 LAT2⇒DPF1の遷移(c)
LAT2の状態のうち、IF preventable部分について考えます。
$$
\begin{eqnarray}
\overline{q_\text{DPF(c),IFR}}&=&\frac{1}{T_\text{lifetime}}\Pr\{\text{DPF via (c) at }T_\text{lifetime}\}\\
&=&\frac{1}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}\Pr\{\text{LAT2}_{\text{prev}}\text{ at }t\cap\text{IF}^{\text{R}}\text{ down in }(t, t+dt]\}\\
&=&\frac{1}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}\Pr\{\text{IF}^{\text{R}}\text{ down in }(t, t+dt]\ |\ \text{LAT2}_{\text{prev}}\text{ at }t\}\\
& &\ \ \ \ \cdot\Pr\{\text{LAT2}_{\text{prev}}\text{ at }t\}
\end{eqnarray}
\tag{1088.1}
$$
IF preventableのup状態は、従来はMPF detectedをMPF latent扱いとしていましたが、本再検討ではMPF detectedをnon faultyとして扱います。したがって、IF preventableのup状態は、
$$
\begin{eqnarray}
\Pr\{\text{IF}^{\text{R}}_{\text{prev}}\text{ up at }t\}&=&K_\text{IF,RF}\color{red}{K_\text{IF,det}}\left[R_\text{IF}(t)+F_\text{IF}(t)\right]\\
& &+K_\text{IF,RF}\color{red}{(1-K_\text{IF,det})}\left[(1-K_\text{IF,MPF})R_\text{IF}(t)+K_\text{IF,MPF}R_\text{IF}(u)\right]\\
&=&K_\text{IF,RF}\color{red}{K_\text{IF,det}}+K_\text{IF,RF}\color{red}{(1-K_\text{IF,det})}A_\text{IF}(t)
\end{eqnarray}
\tag{1088.2}
$$
となります。ただし、$A_\text{IF}(t):=(1-K_\text{IF,MPF})R_\text{IF}(t)+K_\text{IF,MPF}R_\text{IF}(u)$です。
また、SMのdown状態を、$Q_\text{SM}(t):=(1-K_\text{SM,MPF})F_\text{SM}(t)+K_\text{SM,MPF}F_\text{SM}(u)$とすれば、
$$
\begin{eqnarray}
\Pr\{\text{LAT2}_{\text{prev}}\text{ at }t\}&=&\Pr\{\text{IF}^{\text{R}}_{\text{prev}}\text{ up at }t\cap\text{SM down at }t\}\\
&=&\left[K_\text{IF,RF}\color{red}{K_\text{IF,det}}+K_\text{IF,RF}\color{red}{(1-K_\text{IF,det})}A_\text{IF}(t)\right]Q_\text{SM}(t)
\end{eqnarray}
\tag{1088.3}
$$
となります。
一方、(1088.1)の右辺積分中の条件付き確率式は、
$$
\require{cancel}
\begin{eqnarray}
&&\hspace{-6em}\Pr\{\text{IF}^{\text{R}}\text{ down in }(t, t+dt]\ |\ \text{LAT2}_{\text{prev}}\text{ at }t\}\\
&=&\Pr\{\text{IF}^{\text{R}}\text{ down in }(t, t+dt]\ |\ \text{IF}^{\text{R}}_{\text{prev}}\text{ up at }t\cap\bcancel{\text{SM down at }t}\}\\
&=&\Pr\{\text{IF}^{\text{R}}\text{ down in }(t, t+dt]\ |\ \text{IF}^{\text{R}}\text{ up at }t\}\\
&=&\lambda_\text{IF}dt
\end{eqnarray}
\tag{1088.4}
$$
です。
(1088.3)、(1088.4)を(1088.1)に用いれば、
$$
\begin{eqnarray}
(1088.1)&=&\frac{K_\text{IF,RF}\color{red}{K_\text{IF,det}}\lambda_\text{IF}}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}\left[(1-K_\text{SM,MPF})F_\text{SM}(t)+K_\text{SM,MPF}F_\text{SM}(u)\right]dt\\
& &+\frac{K_\text{IF,RF}\color{red}{(1-K_\text{IF,det})}}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}\left[(1-K_\text{SM,MPF})F_\text{SM}(t)+K_\text{SM,MPF}F_\text{SM}(u)\right]\\
& &\cdot\left[(1-K_\text{IF,MPF})f_\text{IF}(t)+K_\text{IF,MPF}f_\text{IF}(u)\right]dt
\end{eqnarray}
\tag{1088.5}
$$
となります。
ここで、(1088.5)の第二積分において、周期検査により露出時間が短縮されるかどうかを決めるのは、先に潜在しているSM側の$F_\text{SM}(u)$です。後から発生するIF故障密度側の$f_\text{IF}(u)$により、積分結果がさらに$\tau$側へ移るわけではありません。したがって、第二積分も従来の$\beta$ではなく、$\alpha$となります。
よって、正しい積分公式より、
$$
\begin{eqnarray}
(1088.5)&\approx&K_\text{IF,RF}\color{red}{K_\text{IF,det}}\alpha+K_\text{IF,RF}\color{red}{(1-K_\text{IF,det})}\alpha\\
&=&\bbox[#ccffff,2pt]{K_\text{IF,RF}\alpha},\\
& &\text{ただし、}
\alpha:=\frac{1}{2}\lambda_\text{IF}\lambda_\text{SM}\left[(1-K_\text{SM,MPF})T_\text{lifetime}+K_\text{SM,MPF}\tau\right]
\end{eqnarray}
\tag{1088.6}
$$
です。
従来記事では、(1088.5)の第二積分を$\beta$とし、$K_\text{IF,MPF}$と$K_\text{SM,MPF}$を合成した$K_\text{MPF}$を用いていました。しかし、LAT2⇒DPF(c)ではSMが先に潜在しており、IFは後から発生する故障です。したがって、露出時間を決めるのはSM側のMPF検出率$K_\text{SM,MPF}$であり、IF側の$K_\text{IF,MPF}$は一次近似結果には現れません。
 前のブログ
次のブログ
前のブログ
次のブログ