|
15 |
新方式によるPUAの導出 (2) |
さて、過去記事でKパラメータは条件付き確率ではなく、アーキテクチャ固有の値であると仮定したのには理由があり、2つの問題があるからでした。
問題1
しかしながら、Kパラメータ($K_{\mathrm{FMC,MPF}}$及び$K_{\mathrm{FMC,RF}}$)が条件付き確率として一定だと矛盾が起きます。抑止条件が確率的に作用することにより、例えば1回目にはVSG抑止されたフォールトが、2回目にはVSG抑止されないことが起こりえます。あるいは1回目にはリペアされたフォールトが2回目にはリペアされないことが起こりえます。検出が確率的になされるからとはいえ、同じ故障が検出されたりされなかったりするのは、合理性がありません。
これはIFのフォールトについてのステートメントなので、SMに書き換えます。
問題1
しかしながら、Kパラメータ($K_{\mathrm{MPF}}$)が条件付き確率として一定だと矛盾が起きます。検出が確率的に作用することにより、例えば1回目には検出されリペアされたフォールトが、2回目には検出されないことが起こりえます。検出が確率的になされるからとはいえ、同じ故障が検出されたりされなかったりするのは、合理性がありません。
という問題は、フォールト検出はアーキテクチャに無関係に確率的に行われるとすれば、問題ありません。
次の問題は、
問題2
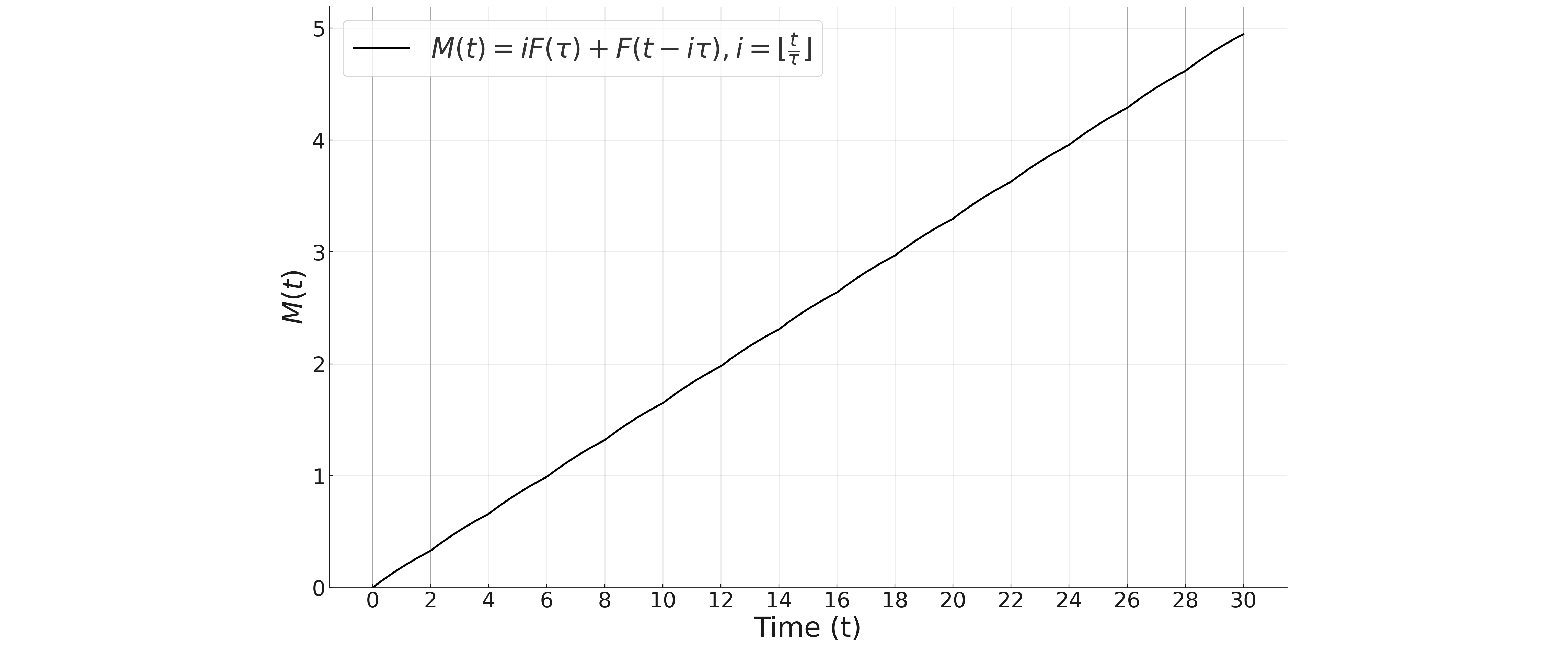
次に、例えば故障検出率$K_{\mathrm{FMC,MPF}}$について考えると、長時間が経ち故障検出を長く続ける場合を考えます。検出されるフォールトは全量リペアされるのに比べて、検出されないフォールトはどんどん溜まって行き、不信頼度は上昇し続けます。従って、新たにフォールトするうちの検出される部分の比率が高まりそうであるのに、条件付き確率として一定値であると感覚に反します。
これはSMのフォールトについてのステートメントなのでそのままです。
これも検出は確率的に行われるとすれば、問題ありません。検出される部分の比が高まるように思うのは、アーキテクチャ的な構造を前提としているからであり、検出が完全に確率的だとすれば、特に矛盾はありません。
なお、本稿はRAMS 2025に投稿予定のため一部を秘匿しています。