|
21 |
PMHFの簡易導出 (3) |
論理式だけによるIFRのPMHF式導出
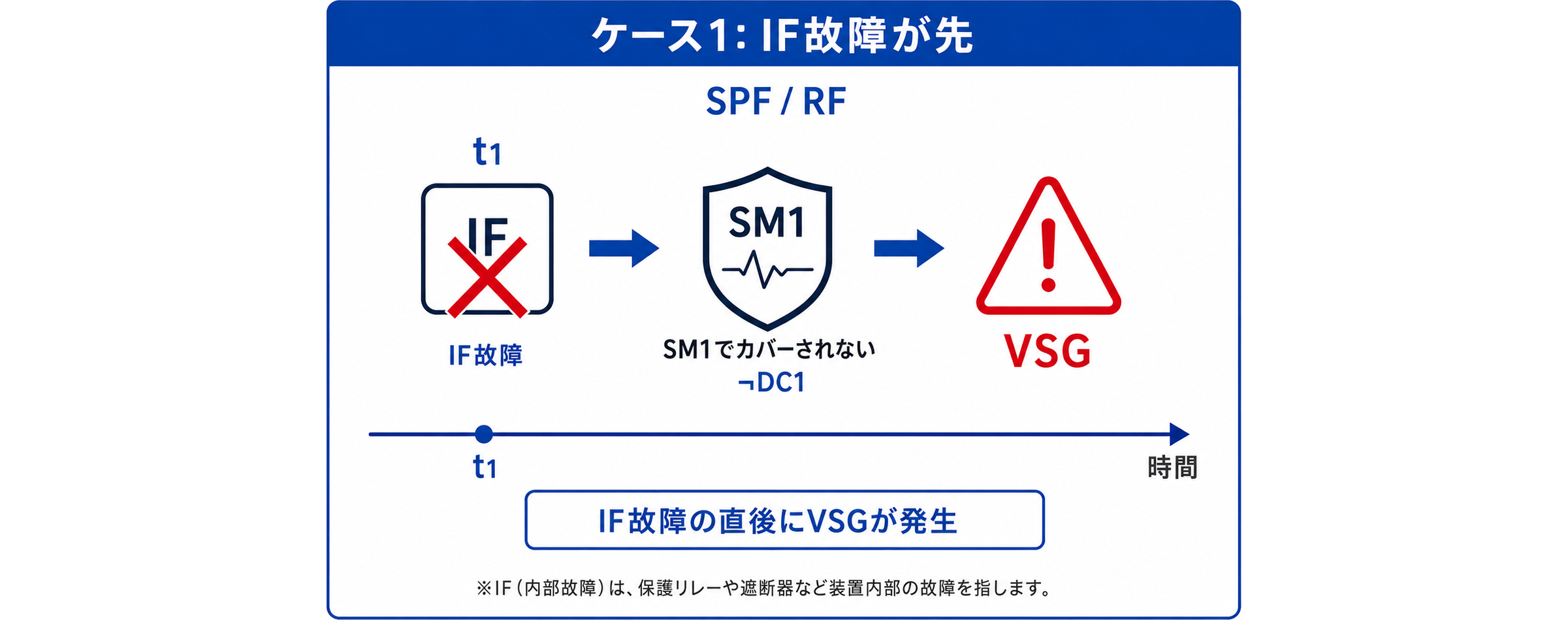
前回までに、IFUの場合のVSG事象は、SPF/RF枝とSM1先行のDPF枝に分解できることを示しました。今回は、IFが修理されるIFR、IF repairableの場合を扱います。
IFRでも、SPF/RF枝はIFUと同じです。IF故障がSM1のカバレッジ外にある場合、そのIF故障だけでVSGに至るため、IFが修理可能かどうかは関係しません。
$$ \{VSG_\text{SPF/RF}\}\equiv\{\overline{IF}\cap\overline{DC_1}\} \tag{1082.1} $$
一方、IFRでは、IFUでPMHF寄与を0として扱った枝が新たに現れます。それは、IF故障が先に発生し、その後にSM1故障が発生する枝です。
IF故障がSM1のカバレッジ内にある場合、SM1が正常であればVSGは抑止されます。しかし、IFが修理されるまでの間にSM1が故障すると、IF故障とSM1故障の組合せによりVSGに至ります。したがって、IFRでは、IF故障が先に発生し、その後にSM1故障が発生する枝がDPFとして追加されます。
$$ \{VSG_{\text{IF}\prec\text{SM}}\}\equiv\{(\overline{IF}\cap DC_1)\prec\overline{SM}\} \tag{1082.2} $$
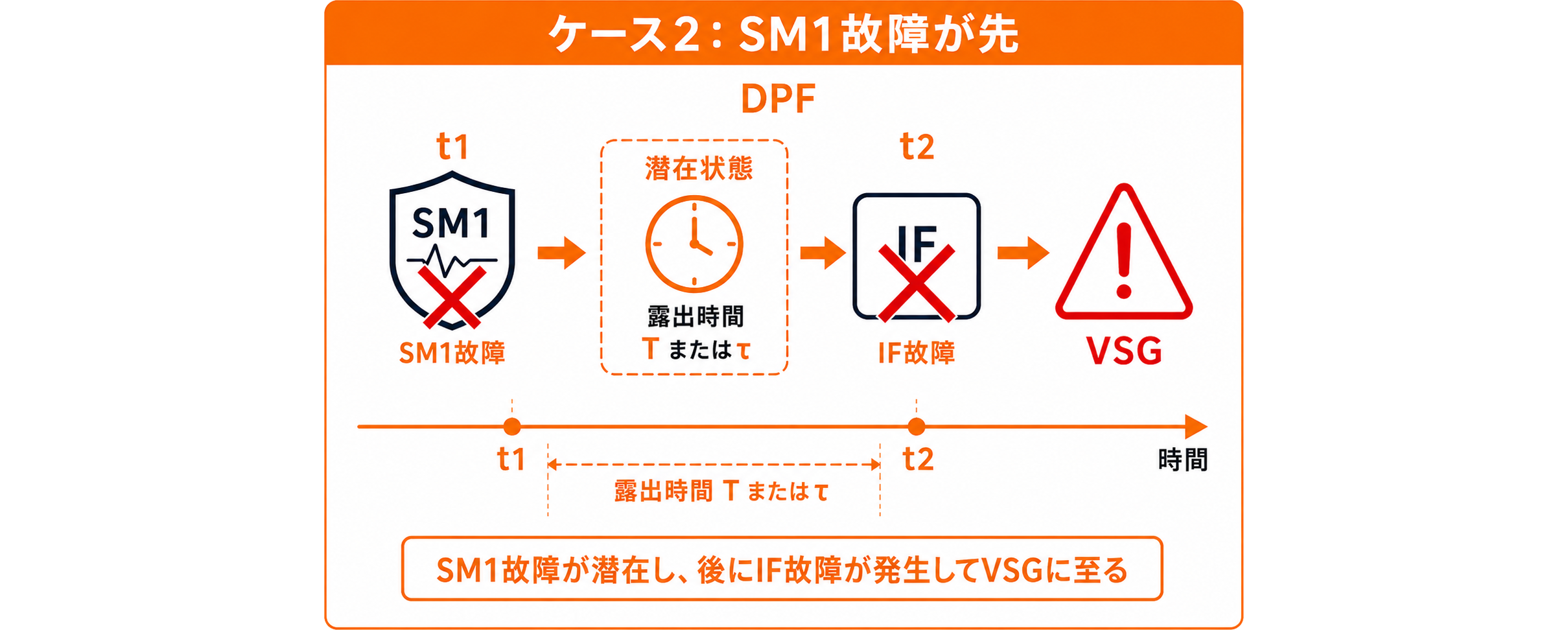
これに対して、SM1故障が先に発生し、その後にIF故障が発生する枝は、IFUの場合と同じです。
$$ \{VSG_{\text{SM}\prec\text{IF}}\}\equiv\{\overline{SM}\prec(\overline{IF}\cap DC_1)\} \tag{1082.3} $$
したがって、IFRの場合のVSG事象は、次の3つの排反事象として表されます。
$$ \begin{eqnarray} \{VSG_\text{IFR}\} &=& \{VSG_\text{SPF/RF}\} \sqcup \{VSG_{\text{SM}\prec\text{IF}}\} \sqcup \{VSG_{\text{IF}\prec\text{SM}}\} \end{eqnarray} \tag{1082.4} $$
ここで、SM1先行枝はIFUの場合と同じく、SM1故障の暴露時間により2つに分かれます。
$$ \begin{eqnarray} \left\{ \begin{array}{l} \{VSG_{\text{SM}\prec\text{IF,lat}}\} \equiv \{(\overline{SM}\cap\overline{DC_2})\prec_T(\overline{IF}\cap DC_1)\}\\ \{VSG_{\text{SM}\prec\text{IF,det}}\} \equiv \{(\overline{SM}\cap DC_2)\prec_\tau(\overline{IF}\cap DC_1)\} \end{array} \right. \end{eqnarray} \tag{1082.5} $$
第1枝ではSM1故障がSM2により検出されないため、暴露時間は$T$です。第2枝ではSM1故障がSM2により検出または修理されるため、暴露時間は$\tau$です。
次に、IF先行枝を考えます。ここでは、IF故障が修理または除去されるまでの暴露時間が問題になります。そこで、$DC_\text{IF}$を、IF故障の暴露時間を$T$から$\tau$へ短縮する診断または修理側のカバレッジとして導入します。
$$ \begin{eqnarray} \left\{ \begin{array}{l} \{VSG_{\text{IF}\prec\text{SM,lat}}\} \equiv \{(\overline{IF}\cap DC_1\cap\overline{DC_\text{IF}})\prec_T\overline{SM}\}\\ \{VSG_{\text{IF}\prec\text{SM,det}}\} \equiv \{(\overline{IF}\cap DC_1\cap DC_\text{IF})\prec_\tau\overline{SM}\} \end{array} \right. \end{eqnarray} \tag{1082.6} $$
第1枝ではIF故障が修理されず、暴露時間は$T$です。第2枝ではIF故障が修理対象となり、暴露時間は$\tau$です。したがって、IFRでは、SM1故障の暴露時間だけでなく、IF故障の暴露時間もPMHFに現れます。
ここから、各枝をレアイベント近似で確率へ変換します。まず、SPF/RF枝はIFUの場合と同じです。
$$ \begin{eqnarray} PMHF_\text{SPF/RF}(T) &=&\frac{1}{T}\Pr\{VSG_\text{SPF/RF}\}\\ &=&\frac{1}{T}\Pr\{\overline{IF}\cap\overline{DC_1}\}\\ &\approx&\frac{1}{T}(1-DC_1)\lambda_\text{IF}T\\ &=&(1-DC_1)\lambda_\text{IF} \end{eqnarray} \tag{1082.7} $$
SM1先行枝の寄与も、IFUの場合と同じです。
$$ \begin{eqnarray} PMHF_{\text{SM}\prec\text{IF}}(T) &\approx& \frac{1}{2}DC_1\lambda_\text{IF}\lambda_\text{SM} \{(1-DC_2)T+DC_2\tau\} \end{eqnarray} \tag{1082.8} $$
次に、IF先行枝の寄与を求めます。IF故障が先に発生し、その後にSM1故障が発生する順序付き二重故障であるため、同じく係数$\frac{1}{2}$が付きます。
$$ \begin{eqnarray} PMHF_{\text{IF}\prec\text{SM}}(T) &\approx& \frac{1}{2}DC_1\lambda_\text{IF}\lambda_\text{SM} \{(1-DC_\text{IF})T+DC_\text{IF}\tau\} \end{eqnarray} \tag{1082.9} $$
したがって、IFRの場合のPMHFは、SPF/RF枝、SM1先行DPF枝、IF先行DPF枝の和として得られます。
$$ \begin{eqnarray} PMHF_\text{IFR}(T) &\approx& PMHF_\text{SPF/RF}(T)+PMHF_{\text{SM}\prec\text{IF}}(T)+PMHF_{\text{IF}\prec\text{SM}}(T)\\ &\approx& (1-DC_1)\lambda_\text{IF}\\ &&+\frac{1}{2}DC_1\lambda_\text{IF}\lambda_\text{SM} \{(1-DC_2)T+DC_2\tau\}\\ &&+\frac{1}{2}DC_1\lambda_\text{IF}\lambda_\text{SM} \{(1-DC_\text{IF})T+DC_\text{IF}\tau\}\\ &=&\lambda_\text{RF}\\ &&+\frac{1}{2}\lambda_\text{IF,DPF}\lambda_\text{SM1,DPF,lat}T\\ &&+\frac{1}{2}\lambda_\text{IF,DPF}\lambda_\text{SM1,DPF,det}\tau\\ &&+\frac{1}{2}\lambda_\text{SM1,DPF}\lambda_\text{IF,DPF,lat}T\\ &&+\frac{1}{2}\lambda_\text{SM1,DPF}\lambda_\text{IF,DPF,det}\tau \end{eqnarray} \tag{1082.10} $$
最後の変形はパラメータを観測可能なパラメータに分解したものを逆に戻し、規格式と対応するようにしました。

規格式との違いは暴露時間が$\tau$の場合に0.5がかかることであり、これは過去記事で、積分範囲がスライディングウインドウになっているという規格式の誤りを指摘しています。
IFRでは、IFUのSM1先行DPF枝に加えて、IF先行DPF枝が追加されます。工学的には、IF故障がSM1のカバレッジ内にあっても、そのIF故障が修理されるまでの間にSM1故障が発生すれば、2個の故障の組合せによりVSGへ至るためです。