|
17 |
PL UARTの接続とPCでの表示 |
PL部UARTのPCへの出力
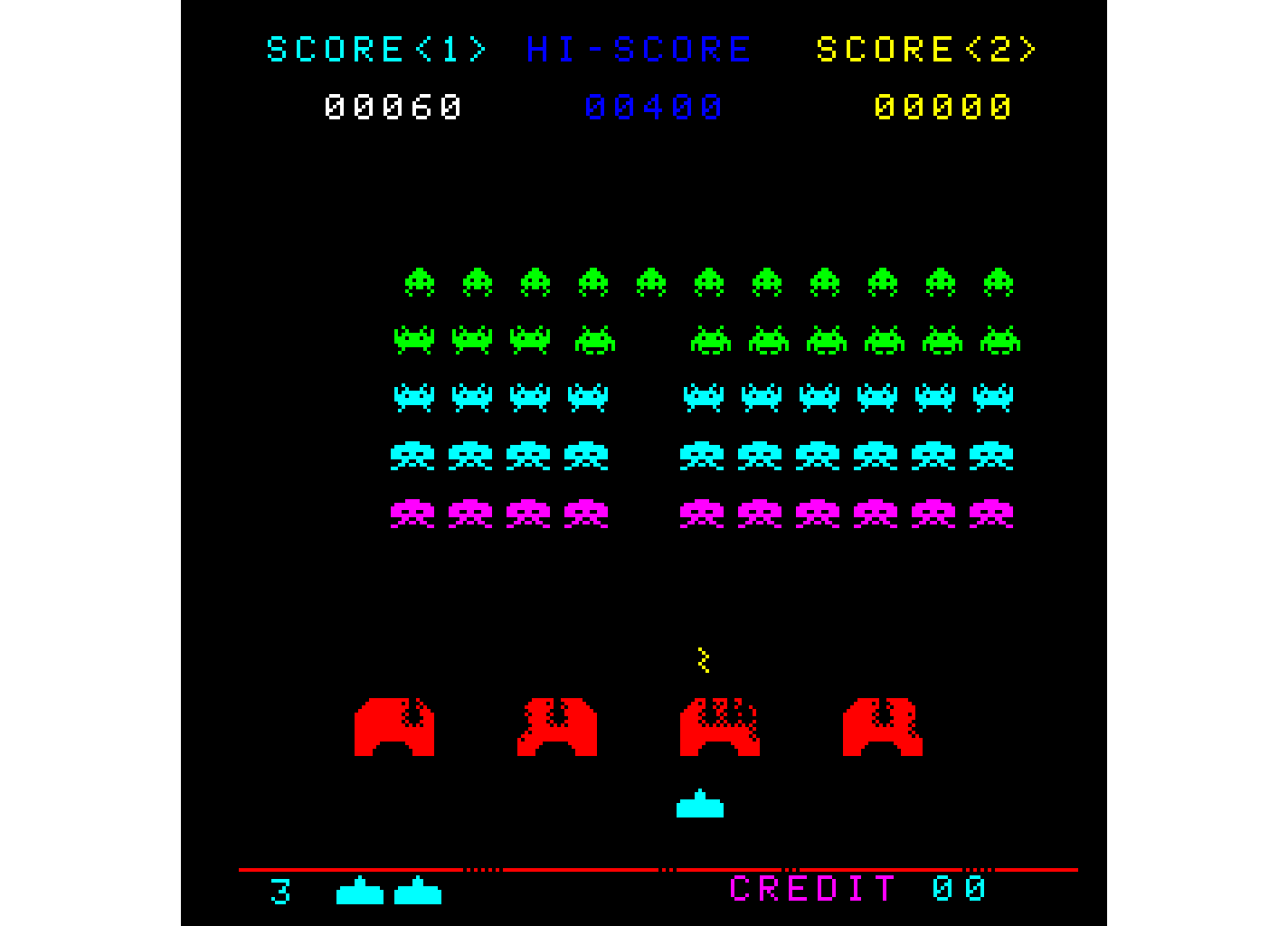
以前Space Invadersのゲーム実行中のVRAM画面の吸出しを実施しました。過去記事ではこれ等が相当します。これは、メモリダンプモジュールをBSVにより設計し、UARTの送信機能を用いてUART/USB変換ボードを経由してPCとUSBで接続し、PC上のPuttyでメモリダンプ情報を取得するというものです。
ところが、再度実行しようとしたところ、どうしてもUARTの出力の取得ができませんでした。前回は比較的簡単にできてしまったので、記事にはpin設定であるxdcの詳細は書いていませんでした。単にUART_TXに接続するとのみと書いており、端子番号は今は定かではありません。
こうなると基本から調べなければならないので、まずUltra96V2の回路図を見ると、なんとPS部からの接続となっているようです。
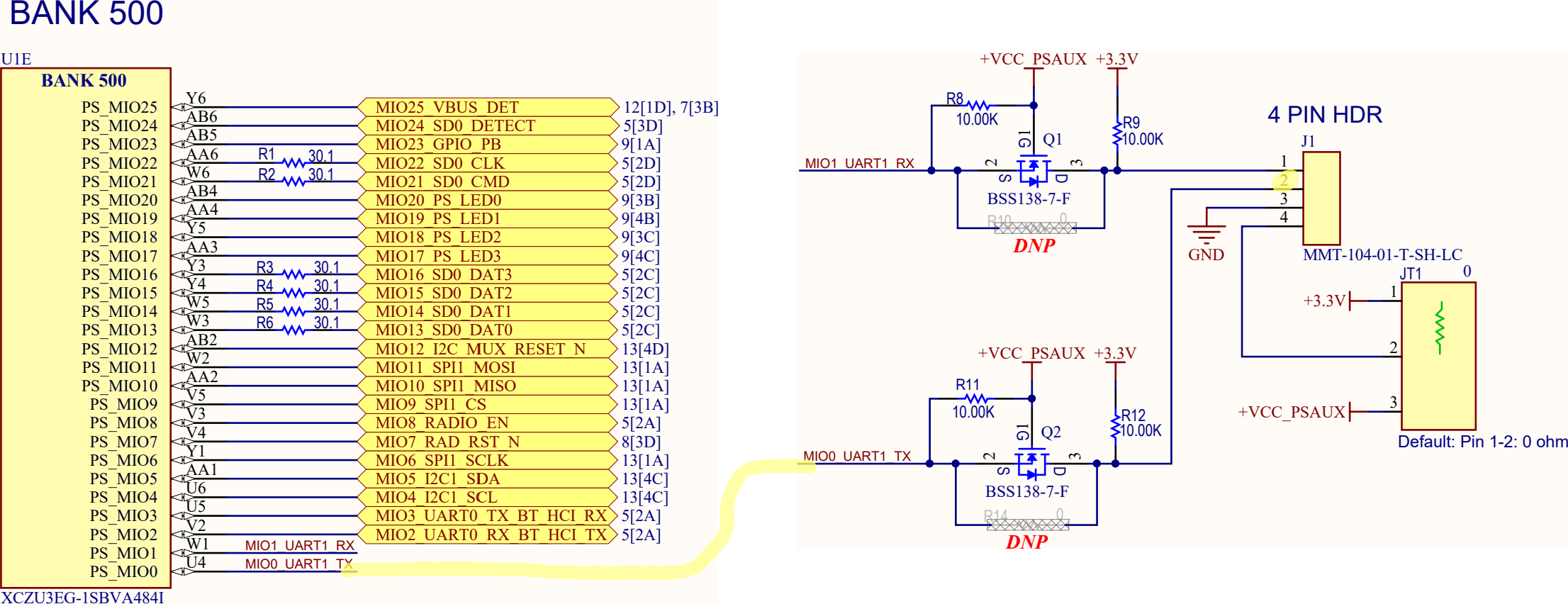
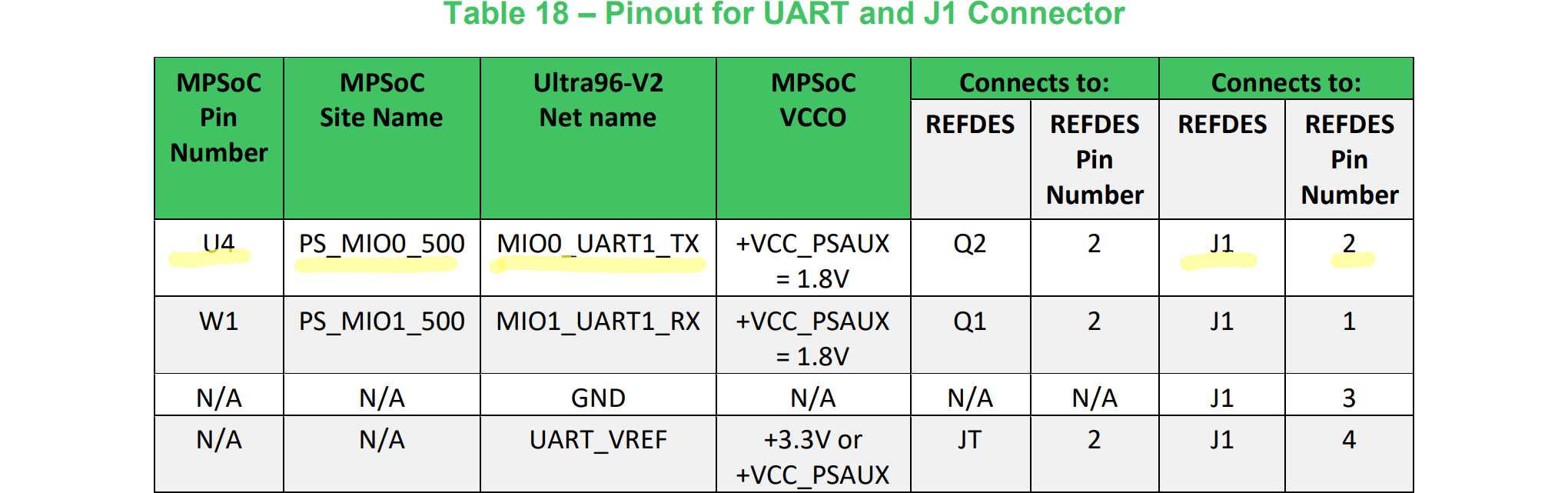
UART/USB変換ボードのJ1の2 pinにUART_TXが接続されていますが、これはPS_MIO0のUART1_TXであり、PLからはPIN配置でエラーになるため、PS部であるBank 500のU4端子に接続することはできません。図605.2にUltra96-V2ハードウェアユーザーズガイドの抜粋を示しますが、やはりBank 500(PS部)のU4端子となっています。
従って、最後の手段としてボード上に配線をハンダ付けし無理やりJ1に出力することを考えます。
まず図605.3はPL部UART_TXの引き出しを示す回路図です。
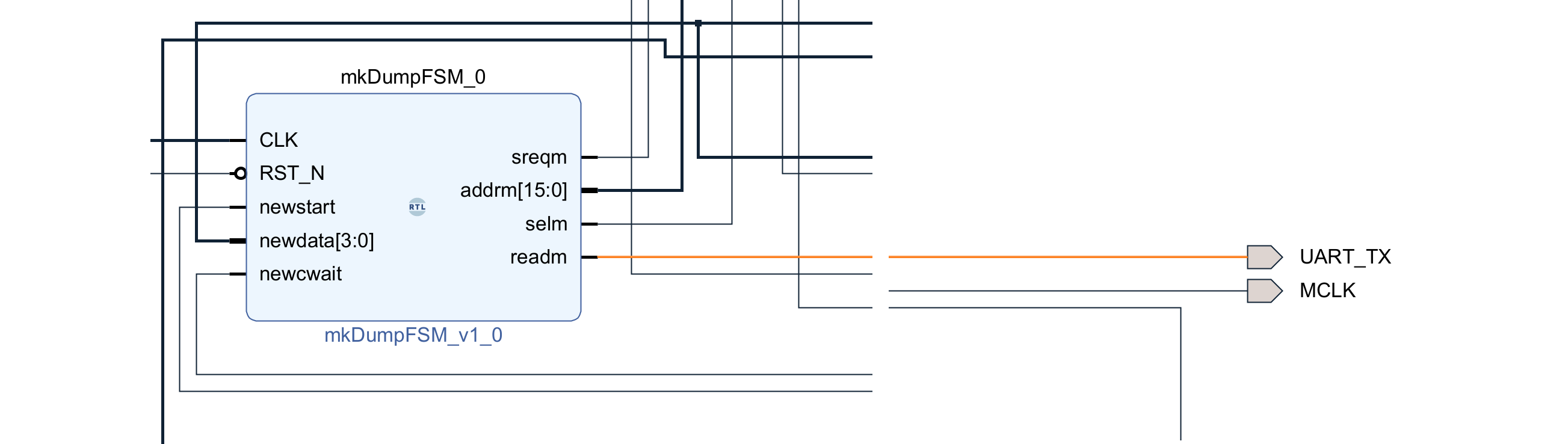
このUART_TXを次のxdcによりG6端子に割り当てます。これはPL部の出力(Bank 26)です。
set_property PACKAGE_PIN G6 [get_ports {UART_TX}]
最後にUART_TXを割り着けた端子G6とJ1の2 pinの間に配線をハンダ付けし、ショートしてやります。レベル的に本来はTrのD側ではなくS側に接続すべきですが、3.3Vにpull upされているため、これでもVOHは満足しているようです。
このようにすることで921,600bpsにより、VRAM内容の送信がうまく動作しました。が、以前設定だけでできた理由は不明のままです。
PCへの出力結果の確認
以下に、得られたlogファイルを画像に変換するフィルタを再掲します。
log2ppm.c
#include <stdio.h>
void main() {
char line[4096];
char ch;
printf("P3\n256 256\n255\n");
for(int y = 0; y <= 255; y++) {
fgets(line, sizeof(line), stdin);
for(int x = 0; x <= 255; x++) {
ch = line[x] - 0x30;
if ((ch & 0x4) != 0) printf("255 "); // R
else printf("0 ");
if ((ch & 0x2) != 0) printf("255 "); // G
else printf("0 ");
if ((ch & 0x1) != 0) printf("255 "); // B
else printf("0 ");
}
printf("\n");
}
}
以下のコマンドによりフィルタを作成します。
$ gcc -O log2ppm.c -o log2ppm
これを下記のようにフィルターとして実行し、ログデータを画像ファイルに変換します。
$ ./log2ppm <putty.log >putty.ppm
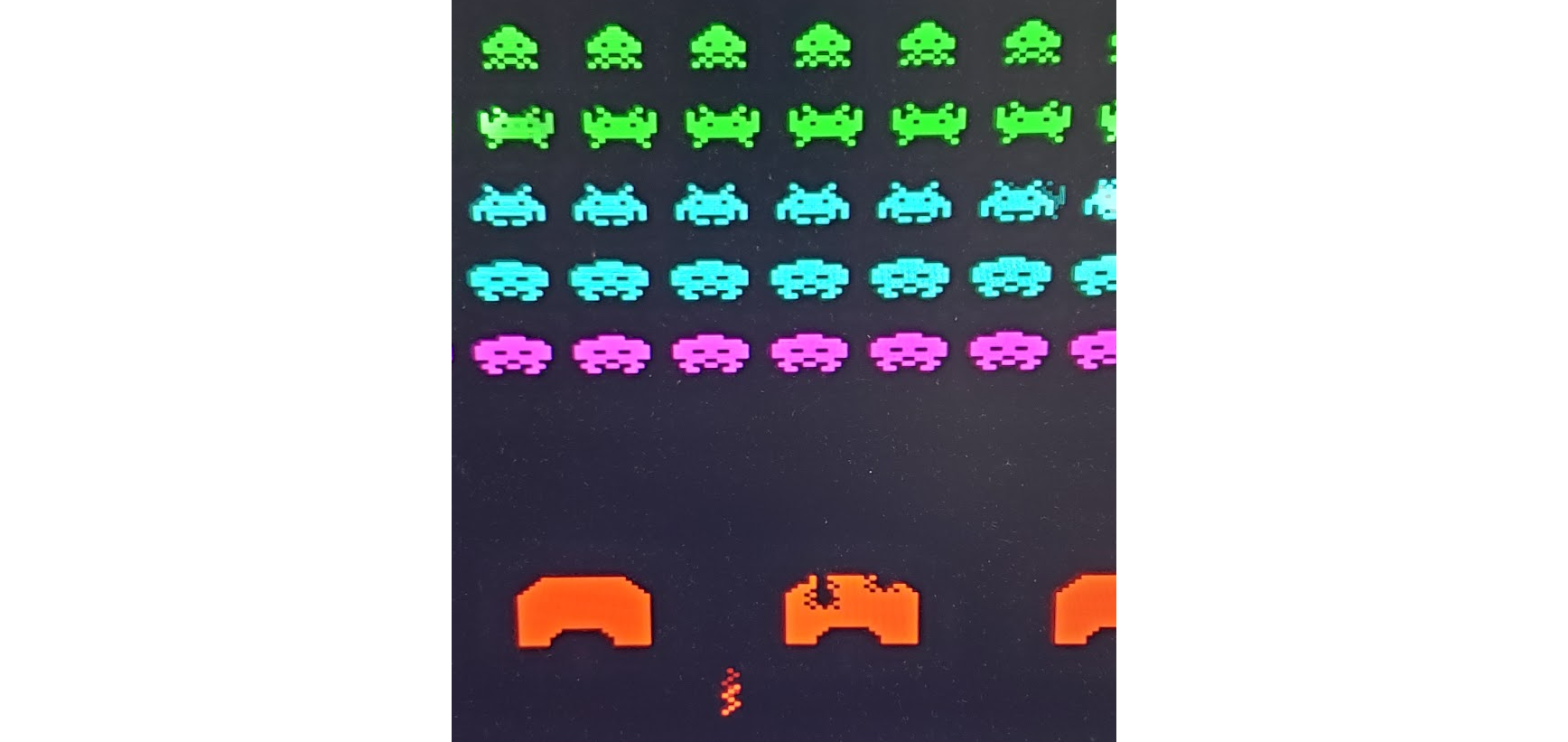
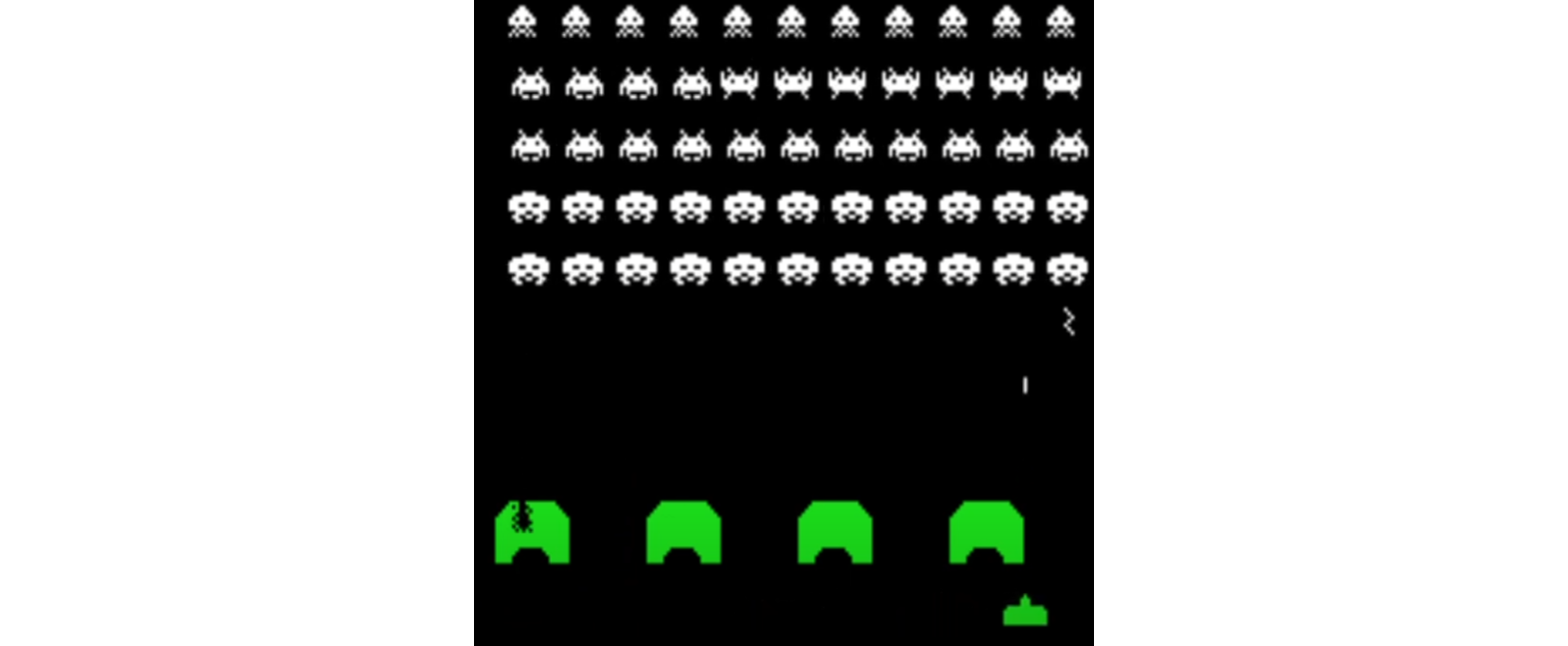
生成されたppm図形を図605.4に示します。