|
28 |
8.3.1 マイコンの取り扱い他 |
8.3.1 マイコンの取り扱い
1st EditionではPart 10が主にISO 26262を半導体に適用する場合のガイドラインであったため、マイコンの取り扱いはPart 10に存在しましたが、2nd Editionになって、Part 10は全般的なガイドラインとなり、Part 11としてISO 26262を半導体に適用する場合のガイドラインが新設されたため、ISO 26262をマイコンに適用する場合の話題がPart 11に移動しました。
8.3.2 PMHF式
PMHF式については説明が追加されました。しかしながら、導出過程や導出前提を明らかにしたものではありません。また、式自体にも疑義があります。弊社ではPMHFを1st Edition発効から8年間に渡って研究しており、その結果としてIEEE最優秀論文賞を得ることができました。この論文は1st Editionの式を対象としていますが、新たに2nd Editonで式が変更されたため、それに基づく論文をIEEEに投稿中です。
弊社ではPMHFに関する論文をRAMS 2020に投稿中であり、そのため、最新の研究#103~108を一旦非開示としました。⇒RAMS 2020においてPMHF式の論文発表が終了したため、本記事を開示します。
12 システム開発のガイダンス
1st Editionの思想から拡張されているフォールトトレランス(耐故障性)についてまとめられた節が新設されました。1st Editionの思想は、とにかくフォールトが発生した場合にはFTTI中にシステムを安全状態に持っていけば、それでハザードが回避できるため、OKでした。
ところが、例えば高速道路の追い越し車線を120Km/hで走行中にフォールトを検出し、いくら安全状態だからといって、その場(追い越し車線内)で車両を停止させてしまうと、これはかなり危険な状態であることが容易に想像できます。このような場合は可能な限り左端の路側帯に寄せて停車するか、もしくは次の出口や安全な場所まで走行したいはずです。
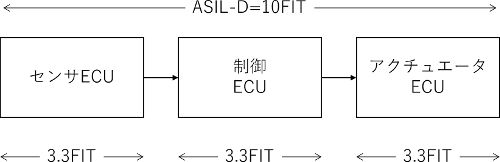
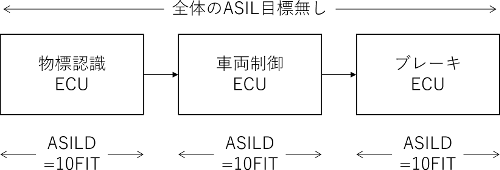
本節ではこのような要求に対して解答を与えるものとなっており、基本的なアーキテクチャはIFに対するSM1としてバックアップ系を想定しています。例えば、IFについてASIL-Dを割り当てている時に、当然その平均PUD(=PMHF)は10[FIT]未満となりますが、故障したときには安全状態で停止するのではなく、動作し続けることがフォールトトレラントのために必要です。しかしながら、その場合にもASIL-Dを要求するものではありません。例えば、バックアップ系の時速が一定速度より遅ければASIL-Bとすることができます。その場合、速度は遅くても修理工場まで走行することが可能です。
本節には2とおり例示されており、緊急動作時間(EOTTI)以内に修理するか、上記のようにバックアップ系に切り替われば良いことになります。問題はEOTTIがあまりにも短い場合(例えば1sec未満)は修理工場に行くことができないので、その計算が必要となります。それが12.3.1.1に示されています。
次の図120.1の(2)は前記事にも掲載されている、2nd EditionのPMHF式(図109.3)の$T_\mathrm{service}$を$T_\mathrm{eotti}$と置き、$T_\mathrm{eotti}$について解いた式となっています。

一方、次の図120.2の(3)は、ワースト時を想定しているようです。バックアップ系がEOTTI時間走行する状態での故障確率式です。

いずれの式にも問題がありそうなので、次項で説明します。