|
9 |
FTA (4) |
FTAツール
商用ツールが各種でていますが、ここではフリーで使用可能なツールをご紹介します。まずALDのFault Tree Analyzerはwebベースで無料でFTA解析が可能なようです。ただしFAQにもあるようにこのツールはwebベースであるためサーバ側にデータを蓄積することから、守秘性の高い情報を扱う場合には同社の有償のツールRAM Commanderを使うほうが良いと書かれています。
続いて本ブログでも使用している米国原子力規制委員会で開発されたSAPHIRE。バージョン8.0.9まではRSICCにより無償で提供されています。ただし米国の公的機関で開発されたためか、守秘契約や会社の情報や使徒について、米国の安全保障に問題が無いことが確認される必要があります。最新版は8.1.3であり、SAPHIREユーザーズグループによって有償で提供されます。
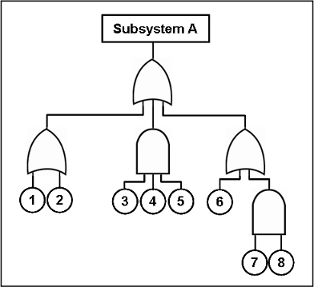
無償版のSAPHIREによりFTA(1)で示したFT図を入力したものを示します。
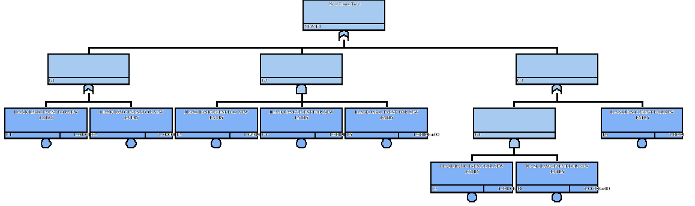
これのMCSを導出すると、

のようになります。1st orderが{E1}, {E2}, {E6}、2nd orderが{E7, E8}、3rd orderが{E3, E4, E5}の計5個のcut setがえられました。ただし元々のFTが複雑でないため、MCSの論理圧縮のご利益はあまりありませんでした。後述するような複雑なFTの場合にはツールの論理圧縮の威力が発揮されます。
本来FTAは基事象の確率に基づきTOP事象の確率を計算するためのものですから、これから基事象の確率を仮定した上でTOP事象確率を計算してみます。
MCSアルゴリズム
実際にMCSを求めるのはどのようなアルゴリズムでしょうか?基本的にはブール代数の基本則に従って論理圧縮を行います。具体的にはブール代数の冪等則、交換則、結合則、吸収則、分配則を用いて 論理の簡単化を行います。