|
5 |
BSVによるUARTの設計 (6) |
BSVによるインタフェース生成
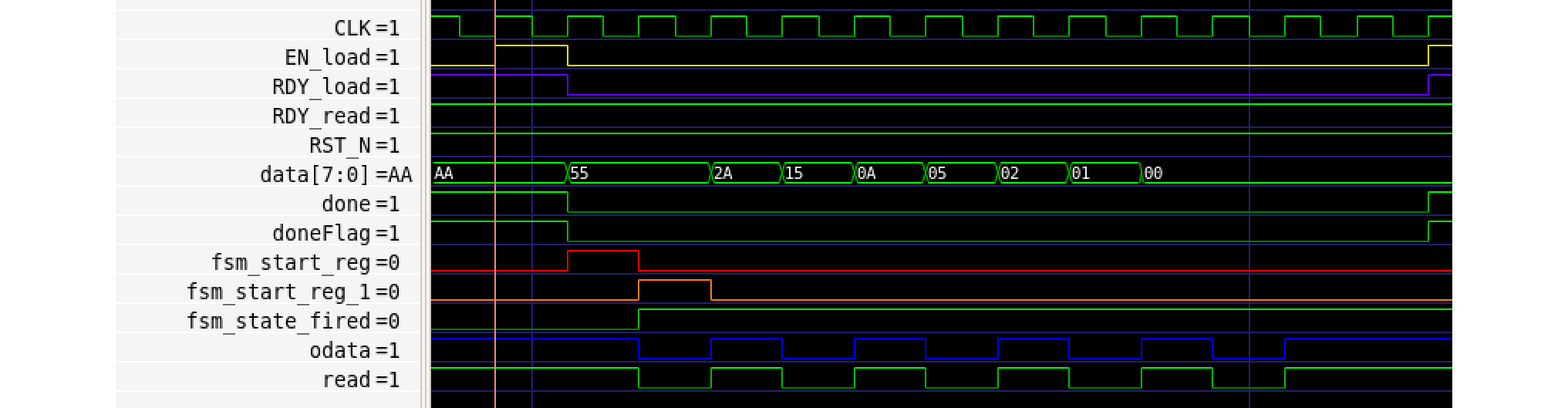
BSVによるハンドシェークインタフェース信号の生成を細かく見ていきます。 注目するのは、テストベンチからUARTに与える8ビットデータとそのハンドシェーク信号です。記述はデータ(data)だけですが、ハンドシェーク信号(RDY_data, EN_data)が自動的に生成されます。その様子を図396.1に示します。左側がテストベンチで、右側がUARTモジュールです。
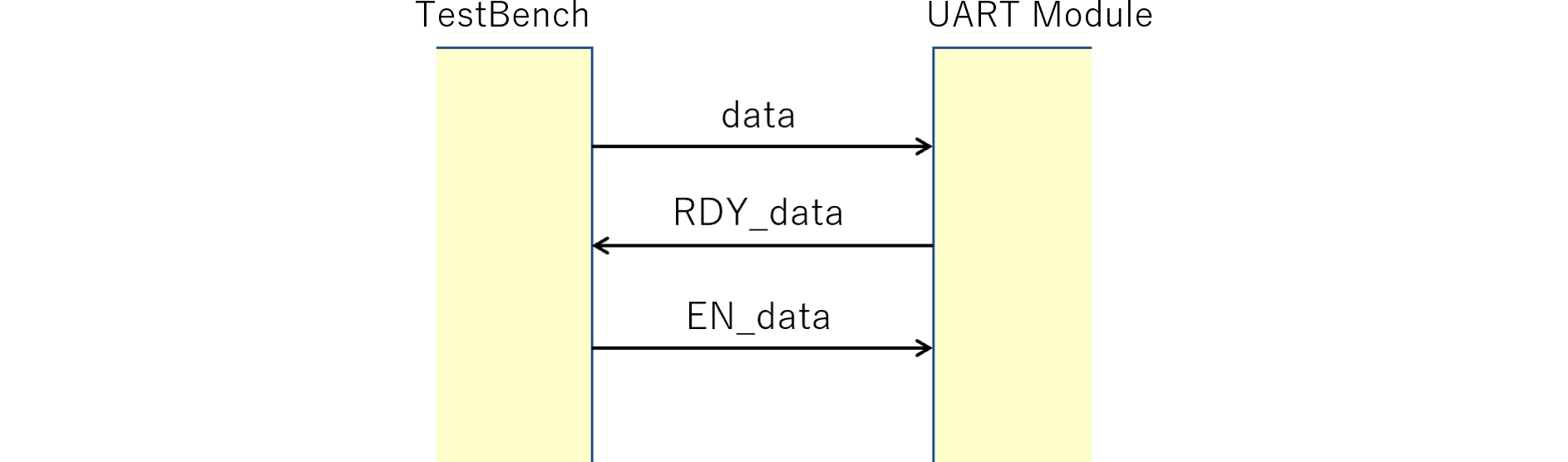
右側のモジュールから見た信号は以下のようになります。
- データ: data (8bit, 入力)
- Ready: RDY_data (1bit, 出力)
- Enable: EN_data (1bit, 入力)
ここでRDY_dataはモジュールの受信可能なタイミングを表し、一方EN_dataはテストベンチからのデータがValidであることを表します。
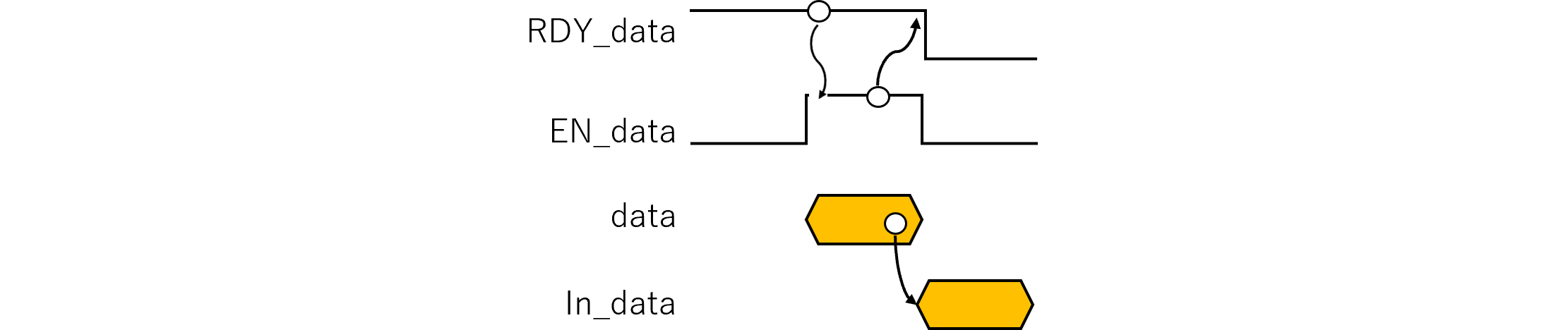
RDYの確認とENのアサートが同サイクルであることに注意します。通常のFF受けの設計だと、RDYを確認した次のサイクルからENのアサートになりそうですが、ENは次のようにRDYを含む組み合わせ回路により構成されています。そのため、ENはRDYと同タイミングでアサートされます。

ENはFF受けされるので、組み合わせ回路出力でヒゲが有っても良いという考えなのでしょうか。このほうがレイテンシが短縮されるため、上手な設計と言えます。